ui.i
Изобретение относится к сельскому хозяйству, в частности ветеринарии, и может найти применение как на крупных комплексах, так и на небольших фермах.
Целью изобретения является повышение эффективности и сокращение времени процесса диагностики отклонений от нормы в физиологическом состоянии животных.
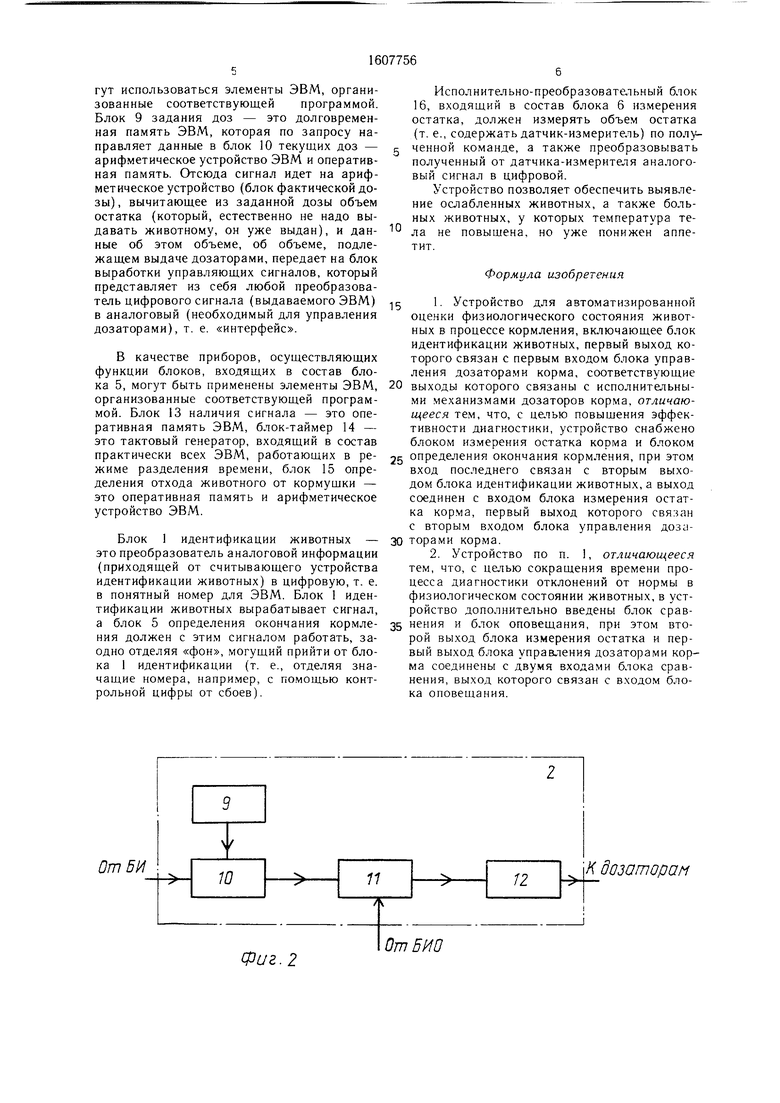
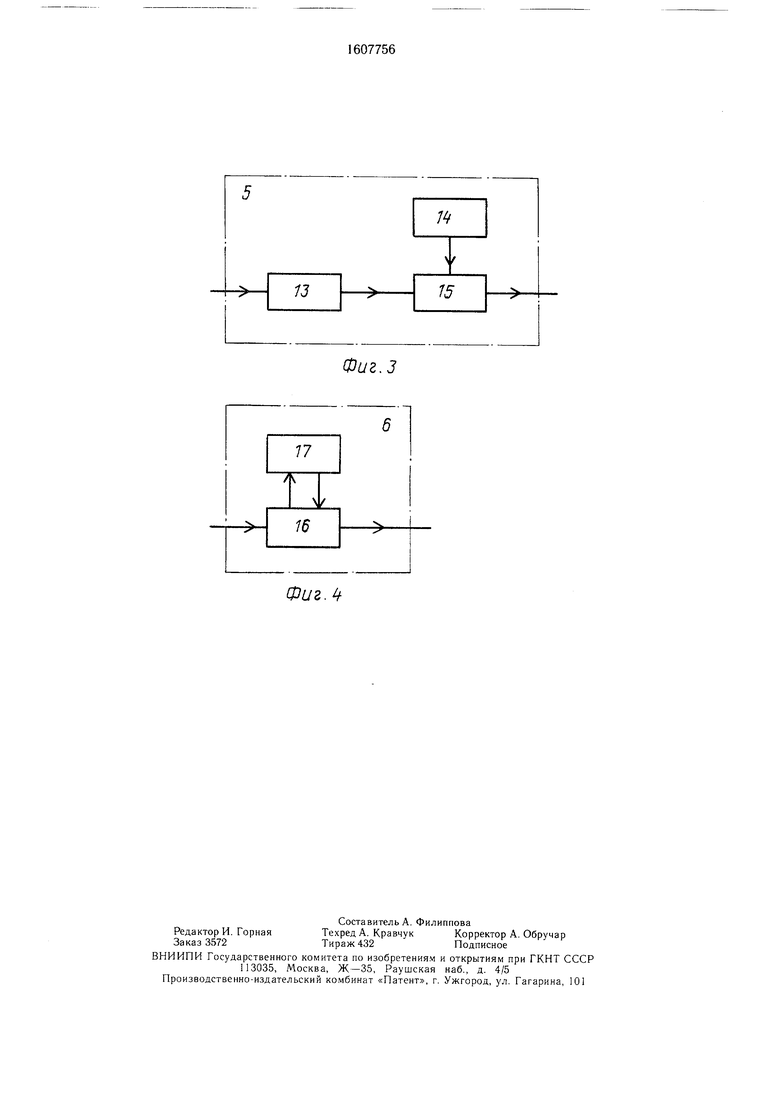
На фиг. 1 приведена блок-схема устройства для автоматизированной оценки физиологического состояния животных в процессе кормления; на фиг. 2 - функцио1 аль- ная схема блока управления дозаторами кормов; на фиг. 3 - функциональная схема блока окончания кормления; на фиг. 4 - функциональная схема блока измерения остатка.
Устройство для автоматизированной оцен ки физиологического состояния животных в процессе кормления содержит блок 1 идентификации животных, подходящих к кормушке, блок 2 управления дозаторами корма, дозаторы 3 и 4 корма, блок 5 определения окончания кормления, блок 6 измерения остатков корма блок 7 сравнения и блок 8 оповещания.
Блок 2 управления дозаторами корма включает блоки задания доз 9, текущих доз 10, фактических доз 11 и выработки управляющих сигналов 12. Блок 5 определения окончания кормления включает блок 13 наличия сигнала, блок-таймер 14, блок 15 определения отхода животного от кормушки. Блок 6 измерения остатков корма включает исполнительно-преобразовательны и блок 16 и датчик 17 объема остатка. Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления работает следующим образом.
При подходе животного к устройству 1 идентификации последнее идентифицирует его и направляет сигнал в блок 2 управления дозаторами, который определяет необходимую данному животному дозу корма, сигнализирует о ее величине в блок 7 сравнения и дает команду дозаторам 3 и 4 на выдачу дозы корма. Одновременно сигнал с блока 1 идентификации идет на блок 5 определения окончания кормления, который включается и ждет момента, когда сигнал пропадет, т. е. когда животное отойдет от устройства. После этого блок 5 определения окончания кормления передает сигнал на блок 6, который измеряет остаток кормов, недоеденных животным, и передает сигнал о его количестве на блок 1 управления дозаторами и блок 7 сравнения. Блок 1 управления дозаторами кормов вносит коррективы в объем порции корма, выдаваемой следующему животному, учитывающие наличие остатка в кормушке, а блок 7 сравнения сравнивает объем остатка с объемом выданной дозы. Если объем остатка превысит некоторую величину (например, 10% от объема дозы), блок 7 сравнения передает сигнал на блок 8 оповещания, который и оповещает оператора, что животное №... требует особого внимания, поскольку оно не
доело ...% порции выданного ему корма. Блок 1 управления дозаторами 3 и 4 работает следующим образом.
Сигнал с блока идентификации животных поступает на блок 10 текущей дозы. В этот же блок поступает информация с
блока 9 задания дозы. Блок текущей дозы определяет объем дозы, полагающейся данному животному и передает эти сведения в блок 11 фактических доз. Последний с учетом полученных от блока 6 измерения ос5 татков корма данных ойределяет, сколько корма (с учетом уже имеющегося в кор- мущке остатка) следует выдать дозаторам. Сигнал об этом направляется в блок 12 выработки управляющих сигналов, который вырабатывает улравляющие сигналы испол нительным механизмом дозаторов 3 и 4 на выдачу дозы корма. При необходимости можно изменить дозу корма, полагающуюся данному животному, это производят с помощью блока 9 задания дозы.
5 Управляющие сигналы, поступающие на исполнительные механизмы дозаторов 3 и 4, могут регулировать степень открытия заслонок и щиберов дозаторов, длите тьность включения приводов дозаторов и тому подобное в зависимости от типа дозаторов. 0 Обработка информации в блоке 5 определения окончания кормления идет следующим образом. Сигнал с блока 1 идентификаций животного поступает на блок 13 наличия сигнала, который включает и посылает сигнал на включение блока 15 35 определения отхода животного от кормущ- ки. Если животное отощло, то сигнал на выходе блока 13 наличия сигнала пропадает. Блок 15 определения отхода животного выжидает Ш-20 с (время выдержки .Q определяется по сигналу от блока-таймера 14), после чего фиксируется факт отхода животного от кормущки и передается команда на блок 6 измерения остатка корма. Из блока 6 измерения остатка корма информация поступает на исполнитатьно- 45 преобразовательный блок 16, который дает команду датчику 17 объема остатка на проведение измерений. Полученные данные измерений поступают на исполнитатьно-преоб- pa30BaTejibHbm блок 16. Последний преобразует сигнал в удобную для дальнейшей 50 передачи форму и направляет в блок 2 управления дозаторами 3 и 4.
Блок I идентификации животных должен включать датчик (может быть применена магнитная метка) и преобразовате. 1Ь апалогичного сигнала в цифровой (может быть взят из устройства, применяемого для различия коров).
В качестве блоков задания доз 9, текущих доз 10 и фактических доз 11 мо55
гут использоваться элементы ЭВМ, организованные соответствующей программой. Блок 9 задания доз - это долговременная память ЭВМ, которая по запросу наИсполнительно-преобразовательный блок 16, входящий в состав блока 6 измерения остатка, должен измерять объем остатка (т. е., содержать датчик-измеритель) по полу10
правляет данные в блок 10 текущих доз - g ценной команде, а также преобразовывать арифметическое устройство ЭВМ и оперативная память. Отсюда сигнал идет на арифметическое устройство (блок фактической дозы), вычитающее из заданной дозы объем остатка (который, естественно не надо выдавать животному, он уже выдан), и данные об этом объеме, об объеме, подлежащем выдаче дозаторами, передает на блок выработки управляющих сигналов, который представляет из себя любой преобразователь цифрового сигнала (выдаваемого ЭВМ) в аналоговый (необходимый для управления дозаторами), т. е. «интерфейс.
15
полученный от датчика-измерителя аналоговый сигнал в цифровой.
Устройство позволяет обеспечить выявление ослабленных животных, а также больных животных, у которых температура тела не повышена, но уже понижен аппетит.
Формула изобретения
1. Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления, включающее блок идентификации животных, первый выход которого связан с первым входом блока управления дозаторами корма, соответствующие
1. Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления, включающее блок идентификации животных, первый выход которого связан с первым входом блока управления дозаторами корма, соответствующие
В качестве приборов, осуществляющих функции блоков, входящих в состав блока 5, могут быть применены элементы ЭВМ,20 выходы которого связаны с исполнительны- организованные соответствующей програм-ми механизмами дозаторов корма, отличаю- мой. Блок 13 наличия сигнала - это one-щееся тем, что, с целью повыщения эффек- ративная память ЭВМ, блок-таймер 14 -тивности диагностики, устройство снабжено это тактовый генератор, входящий в составблоком измерения остатка корма и блоком практически всех ЭВМ, работающих в ре-25 определения окончания кормления, при этом
жиме разделения времени, блок 15 определения отхода животного от кормущки - это оперативная память и арифметическое устройство ЭВМ.
вход последнего связан с вторым выходом блока идентификации животных, а выход соединен с входом блока измерения остатка корма, первый выход которого с вторым входом блока управления доза- идентификации животных - 30 торами корма.
2. Устройство по п. 1, отличающееся тем, что, с це«тью сокращения времени процесса диагностики отклонений от нормы в физиологическом состоянии животных, в устройство дополнительно введены блок сравБлок 1
это преобразователь аналоговой информации (приходящей от считывающего устройства идентификации животных) в цифровую, т. е. в понятный номер для ЭВМ. Блок 1 идентификации животных вырабатывает сигнал.
а блок 5 определения окончания кормле- 35 нения и блок оповещания, при этом втония должен с этим сигналом работать, заодно отделяя «фон, могущий прийти от блока 1 идентификации (т. е., отделяя значащие номера, например, с помощью контрольной цифры от сбоев).
рой выход блока измерения остатка и первый выход блока управления дозаторами корма соединены с двумя входами блока сравнения, выход которого связан с в.ходом блока оповещания.
Исполнительно-преобразовательный блок 16, входящий в состав блока 6 измерения остатка, должен измерять объем остатка (т. е., содержать датчик-измеритель) по полуценной команде, а также преобразовывать
ценной команде, а также преобразовывать
полученный от датчика-измерителя аналоговый сигнал в цифровой.
Устройство позволяет обеспечить выявление ослабленных животных, а также больных животных, у которых температура тела не повышена, но уже понижен аппетит.
Формула изобретения
1. Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления, включающее блок идентификации животных, первый выход которого связан с первым входом блока управления дозаторами корма, соответствующие
выходы которого связаны с исполнительны- ми механизмами дозаторов корма, отличаю- щееся тем, что, с целью повыщения эффек- тивности диагностики, устройство снабжено блоком измерения остатка корма и блоком определения окончания кормления, при этом
рой выход блока измерения остатка и первый выход блока управления дозаторами корма соединены с двумя входами блока сравнения, выход которого связан с в.ходом блока оповещания.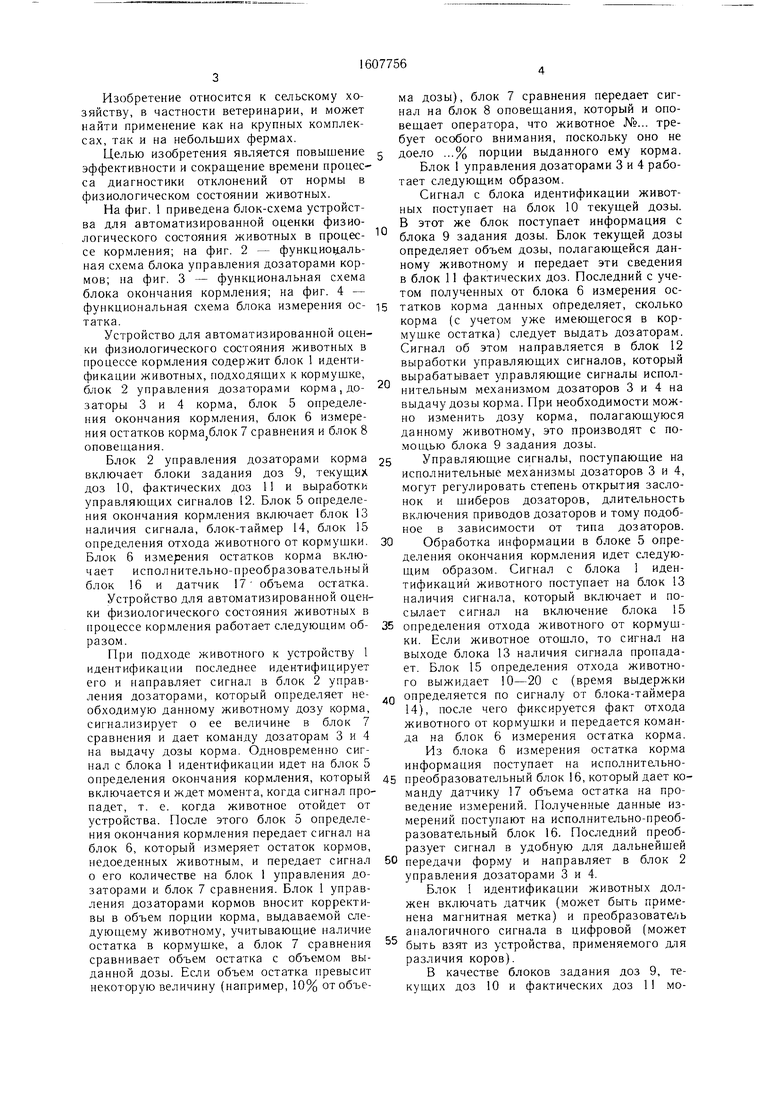
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного управления системой выпоечных аппаратов и устройство для его осуществления | 1987 |
|
SU1604289A1 |
| Способ автоматизированной выдачи корма животным и устройство для его осуществления | 1987 |
|
SU1690633A1 |
| Устройство автоматизированной оценки физиологического состояния животных в процессе кормления | 1986 |
|
SU1526616A1 |
| Устройство индивидуальной раздачи кормов | 1989 |
|
SU1782497A1 |
| Способ автоматизированного управления системой выпоечных аппаратов и устройство для его осуществления | 1987 |
|
SU1604290A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Устройство для автоматизированной оценки физиологического состояния животных в процессе кормления | 1990 |
|
SU1727741A1 |
| Система индивидуальной раздачи концентрированных кормов | 1990 |
|
SU1750520A1 |
| СИСТЕМА И СПОСОБ КОРМЛЕНИЯ ДЛЯ ТРАНСФОРМАЦИИ ПОВЕДЕНИЯ ЖИВОТНЫХ | 2008 |
|
RU2474110C1 |
| Устройство для автоматической раздачи корма | 1980 |
|
SU897187A1 |
Изобретение относится к ветеринарии. Цель изобретения - повышение эффективности и сокращение времени процесса диагностики отклонений от нормы физиологического состояния животных. Устройство включает блок 1 идентификации (БИ), блок 2 управления дозаторами (БУД), дозаторы 3 и 4, блок 5 определения окончания кормления, блок 6 измерения остатков кормов, блок 7 сравнения и блок 8 оповещения. При подходе животного к устройству БИ идентифицирует его и направляет сигнал в БУД, который определяет необходимую данному животному дозу и дает команду дозаторам 3 и 4 на ее выдачу. Одновременно сигнал с БИ идет на блок 5 определения окончания кормления, который включается и ждет момента, когда животное отойдет от кормушки, и сигнал пропадает. В этот момент блок 5 сигнализирует блоку 6 измерения остатков, и тот измеряет объем остатка кормов, сообщая его в БУД для корректировки объема выдаваемой дозы следующему животному и в блок сравнения 7. Последний сравнивает объем остатка с объемом выданной дозы. Если объем остатка больше чем 10% объема дозы, сигнал поступает в блок 8 оповещения. Блок 8 оповещает оператора, что определенное животное требует особого внимания, поскольку оно не доело выданной ему дозы корма. 1 з.п.ф-лы, 4 ил.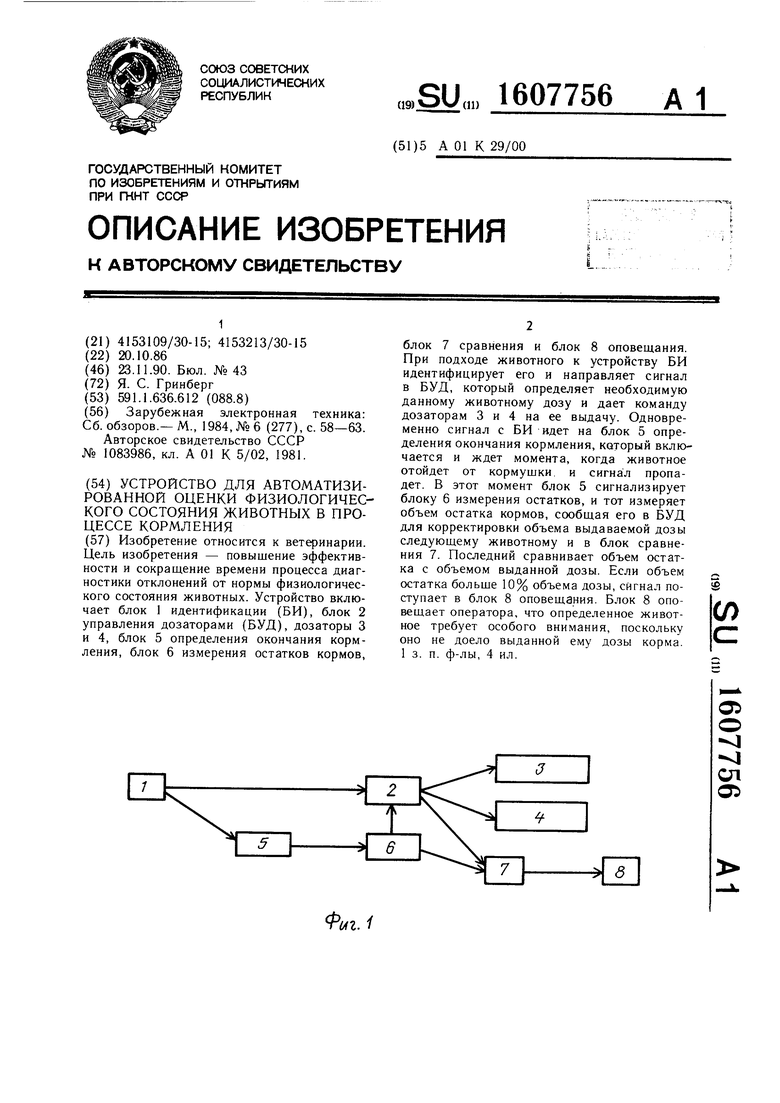
ОтпБИ
Фиг. 2
К дозаторам
ОтБИО
Фиг.З
ФигЛ
| Зарубежная электронная техника: Сб | |||
| обзоров.-М., 1984, №6 (277), с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Устройство порционного кормления животных | 1981 |
|
SU1083986A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
