Фиг.1
/
Изобретение относится к тракторному машиностроению и может быть использовано для диагностирования технического состояния передних и задних осей транспортных средств,
Цель изобретения - повышение точности контроля.
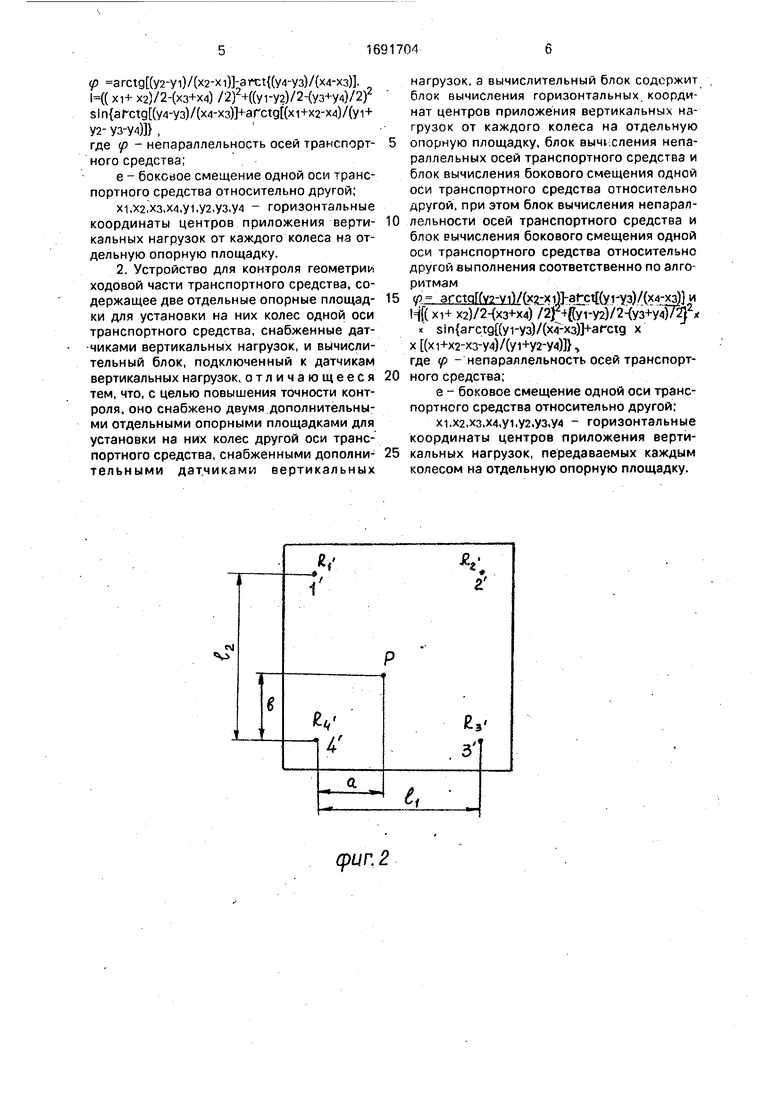
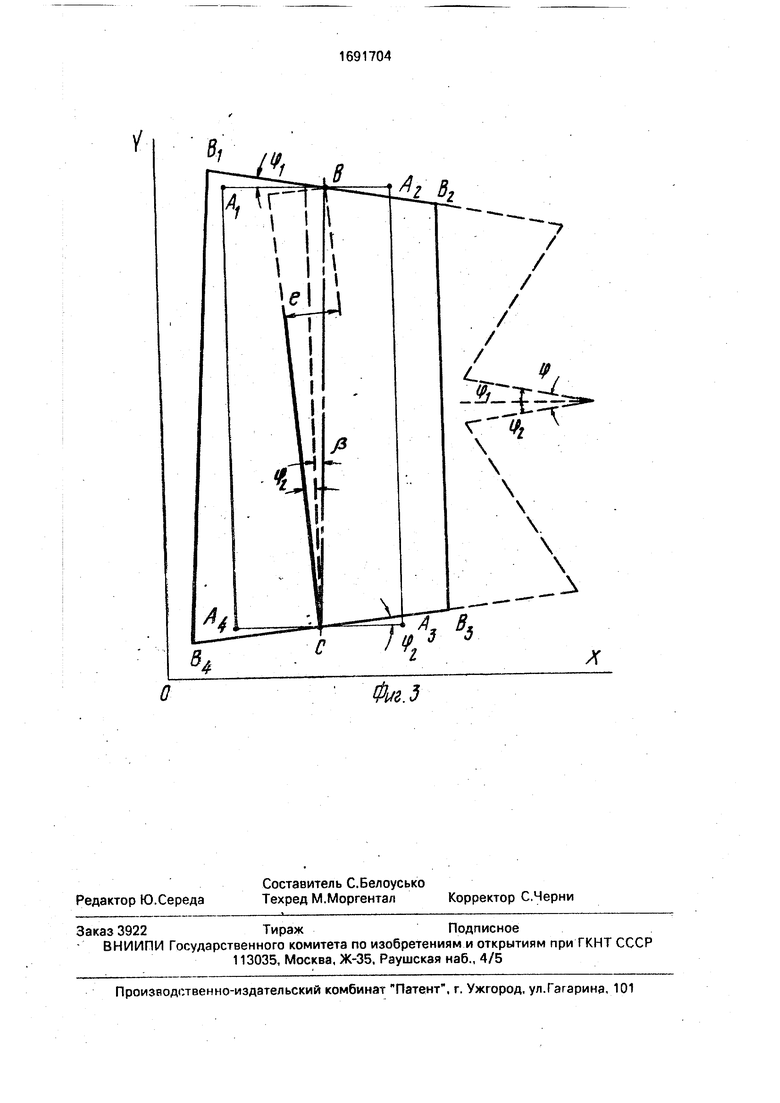
На фиг.1 изображена схема устройства 1для контроля геометрии ходовой части ранспортного средства; на фиг.2 - схема размещения датчиков вертикальных нагрузок на опорной площадке; на фиг.З - схема определения непараллельности осей транспорт нош средства и бокового смещения одной оси относительно другой.
Устройство содержит четыре горизонтальные опорные площадки 1-4, опирающиеся на основание посредством четырех датчиков 5-8 вертикальных нагрузок, подключенных к вычислительному блоку 9, имеющему в своем составе блок вычисления- горизонтальных координат центров приложения вертикальных нагрузок от каждого плеча транспортного средства на отдельную опорную площадку, блок вычисления непараллельности осей тракторного средства и блок вычисления бокового смещения одной оси транспортного средства относительно другой (не показано).
Для реализации способа колеса контролируемого транспортного средства устанавливают на отдельные опорные площадки 1-4, при этом сигналы датчиков- 5-8 вертикальных нагрузок поступают в вычислительный блок 9,
Геометрия ходовой части эталонного транспортного средства характеризуется четырехугольником с вершинами А1.А2,Аз,А4, а геометрия ходовой части контролируемого транспортного средства -.четырехугольником с вершинами ЕН,В2,Вз,В4 (фиг.З).
В вычислительном блоке 9 определяют горизонтальные координаты центров приложения вертикальных нагрузок от каждого колеса на отдельную onqpnyto площадку в относительной системе координат по алго- ритмам
ArP/(R2+R3)li:Bi P/(Ri+R2)l2;
P n+R2+R3+R4.
где ai, bi - горизонтальные координаты центров приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку в относительной системе координат (фиг.2);
Rl,R2,R3,R4 - показания датчиков вертикальных нагрузок;
Р - равнодействующая вертикальных нагрузок, воспринимаемых датчиками 5-8;
И, 12- расстояние между датчиками вертикальных нагрузок вдоль каждой стороны опорной площадки (фиг.2).
Далее в вычислительном блоке 9 опре- деляют горизонтальные координаты (Xi.YI) центров приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку в абсолютной системе координат по алгоритмам Xi ai+Xi; yi bi+Yi;
Х2 32+Х2 У2 Ь2+Y2;
Хз аз+Хз; уз Ьз+Уз;
Х4 34+Х4; y4 D4+Y4,
где xi, yi -постоянные величины, заданные
конструктивно.
В качестве параметров геометрии ходовой час1 и транспортного средства принимает непараллельность р осей транспортного средства и боковое смещение I одной оси
транспортного средства относительно дру гой, определяемые соответственно по алго ритмам
0 аЈс1д(у2-у1)/(х2-Х1))(у4-уз)/Јх4-хр), К( xi+ х2)/2-(хз+Х4) /2)2+(1У1;У2)/2-(уз+У4)/2
xsin arctgf(y4-y3)/(x4-x3)j+arctg{(xi+x2-x3
Х4)/(У1+У2-УЗ-У4))|,
где Х1,х2,хз, Х4,у1,у2,уз,у4 - горизонтальные координаты центрэв приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку,
Таким образом устраняется влияние отклонения положения продольной оси транспорт ного средства от продольной оси устройства, что повышает точность контроля геометрии ходозой части транспортного средства.
Формула изобретения 1. Способ контроля геометрии ходовой части транспортного средства, заключающийся в том, что измеряют вертикальные нагрузки, передаваемые колесами одной оси транспортного средства на отдельные опорные площадки и определяют параметры геометрии ходовой части транспортного
средства, отличающийся тем, что, с целью повышения точности контроля, дополнительно измеряют вертикальные нагрузки, передаваемые колесами другой оси транспортного средства на дополнительные отдельные опорные площадки, далее определяют горизонтальные координаты центров приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку, а в качестве параметров
геометрии ходовой части транспортного средства принимают непараллельность упомянутых осей и боковое смещение одной оси относительно другой, определяемые по формулам
tp arctg(y2-yi)/(x2-xi)-artt{(y4-y3)/(x4-x3) K( xi+ х2)/2-(хз+х4) /2)2+((у1-У2)/2Чуз- У4)/2)2 s I n{a Гс1д(у4-уз) /(х4-хз)+а rctg(x 1+x2-x4)/(y 1+
У2- УЗ-У4)} ,
где f - непараллельность осей транспорт- него средства,
е - боковое смещение одной оси транспортного средства относительно другой;
Х1,х2,хз,х4,у1,у2,уз,у4 - горизонтальные координаты центров приложения верти- кальных нагрузок от каждого колеса на отдельную опорную площадку.
2. Устройство для контроля геометрии ходовой части транспортного средства, содержащее две отдельные опорные площад- ки для установки на них колес одной оси транспортного средства, снабженные датчиками вертикальных нагрузок, и вычислительный блок, подключенный к датчикам вертикальных нагрузок, отличающееся тем, что, с целью повышения точности контроля, оно снабжено двумя дополнительными отдельными опорными площадками для установки на них колес другой оси транспортного средства, снабженными дополни- тельными датчиками вертикальных
нагрузок, а вычислительный блок содержит блок вычисления горизонтальных координат центров приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку, блок выш сления непараллельных осей транспортного средства и блок вычисления бокового смещения одной оси транспортного средства относительно другой, при этом блок вычисления непараллельности осей транспортного средства и блок вычисления бокового смещения одной оси транспортного средства относительно другой выполнения соответственно по алгоритмам
р агctgf(У2-У i)/fX2-X ijVafytf(yi-уз)/(xi-xa) и И(( хг+ х2)/2-(хз+Х4) /2f+ЈУ1-у2)/2-(уз+У4)72)2х sin{arctg{(yi-y3)/(x4:;x3)l+arctg x
X (Х1+Х2-ХЗ-У4)/(У1+У2-У4)1К
где р - непараллельность осей транспортного средства;
е - боковое смещение одной оси транспортного средства относительно другой;
Х1,х2,хз,х4,у1,у2.уз,у4 - горизонтальные координаты центров приложения вертикальных нагрузок, передаваемых каждым копесом на отдельную опорную площадку.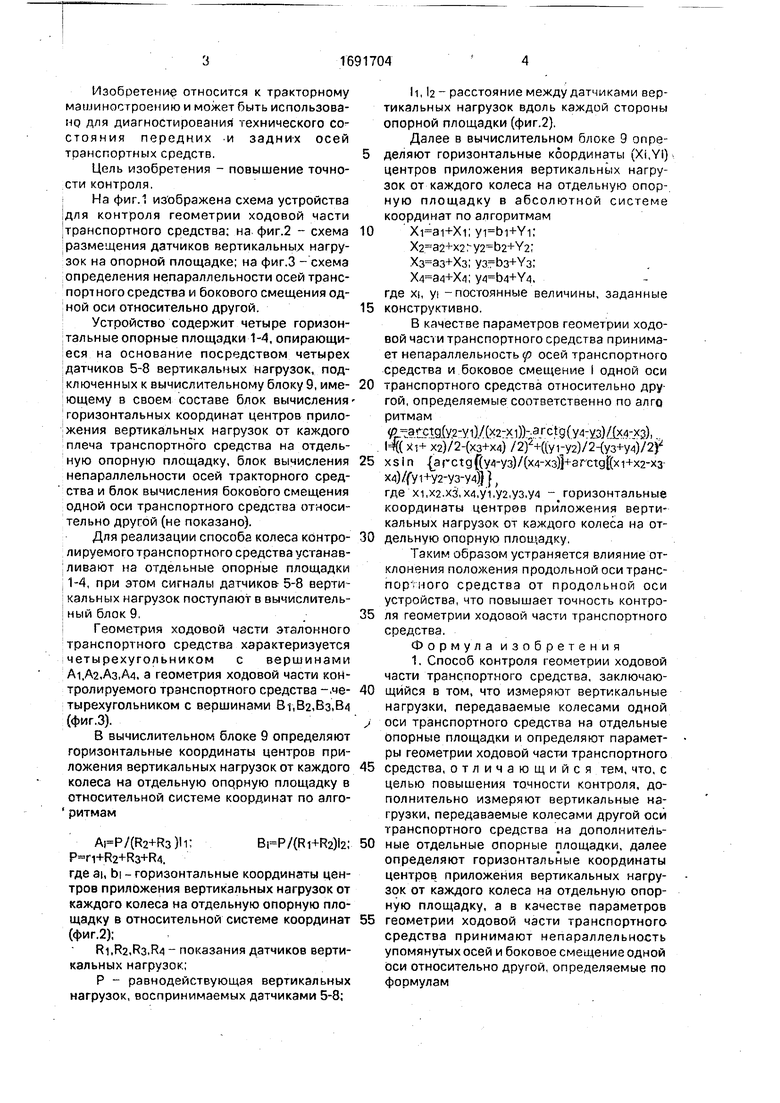
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выявления асинхронного режима электропередачи | 1988 |
|
SU1661913A1 |
| Способ получения интерферограмм контроля качества линз и объективов | 1991 |
|
SU1800302A1 |
| Устройство для укладки кож на козелок | 1986 |
|
SU1362747A1 |
| Четырехразрядный преобразователь двоично-десятичного кода в двоичный | 1984 |
|
SU1181153A1 |
| Непосредственный преобразователь частоты | 1990 |
|
SU1837377A1 |
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
| Формирователь импульсов | 1986 |
|
SU1411945A1 |
| Устройство для контроля состояния критической ситуации | 1990 |
|
SU1737412A1 |
| Система электропитания | 1986 |
|
SU1410229A1 |
| Способ измерения толщины листовых изделий | 1988 |
|
SU1728647A1 |
Изобретение относится к транспортному машиностроению и может быть использовано для диагностирования технического состояния передних и задних осей транспортных средств. Цель изобретения - повышение точности контроля. Для проведения контроля геометрии ходовой части колеса транспортного средства устанавливают на отдельные опорные площадки 1-4, снабженные датчиками 5-8 вертикальных нагрузок, подключенными к вычислительному блоку 9. По показаниям датчиков предварительно определяют в вычислительном блоке горизонтальные координаты центров приложения вертикальных нагрузок от каждого колеса на отдельную опорную площадку и по полученным данным определяют перекос осей и боковое смещение одной оси относительно другой, характеризующие геометрию ходовой части транспортного средства. 2 з.п.ф-лы, 3 ил. S6 А О О з -N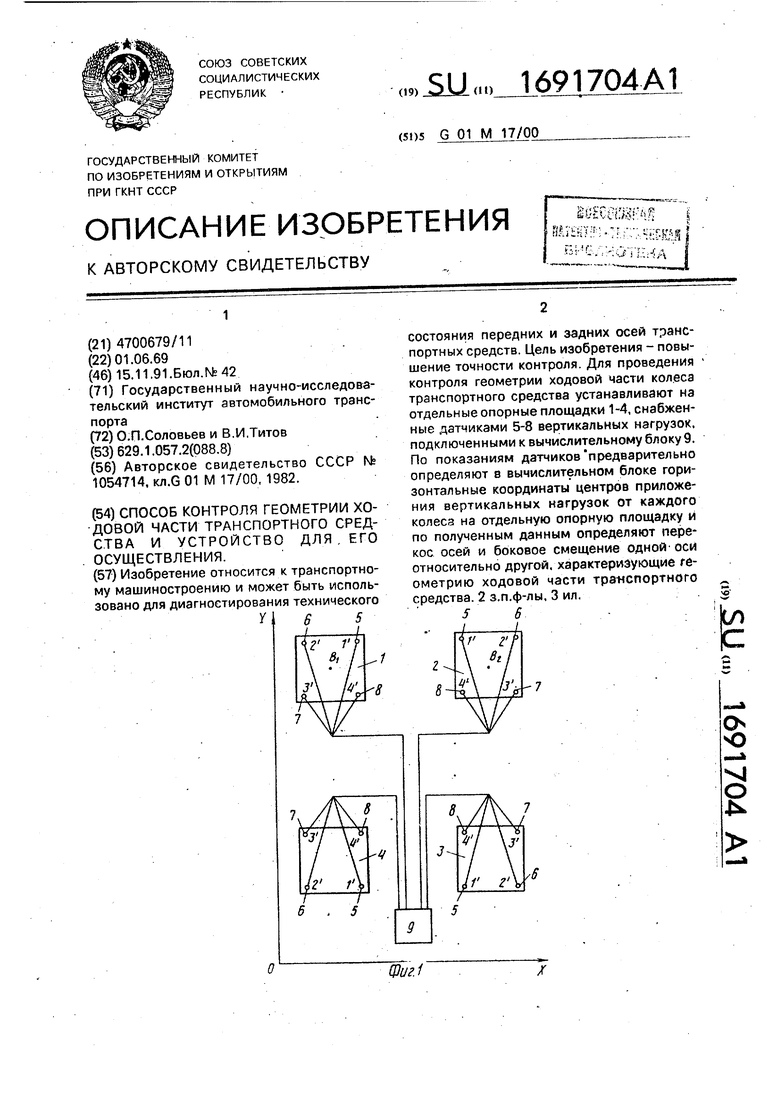
фиг. 2
/
dUt
Л
x
| Авторское свидетельство СССР № 1054714.кл.С 01 М 17/00, 1982. |
