Изобретение относится к легкой промышленности, а именно к кожевенному производству, в частности к механическим устройствам, предназначенны для укладки кож после их окончательной обработки, измерения или после завершения промежуточных операций, например, на проходных машинах.
Цель изобретения - повышение надежности в работе и снижение энергозатрат.
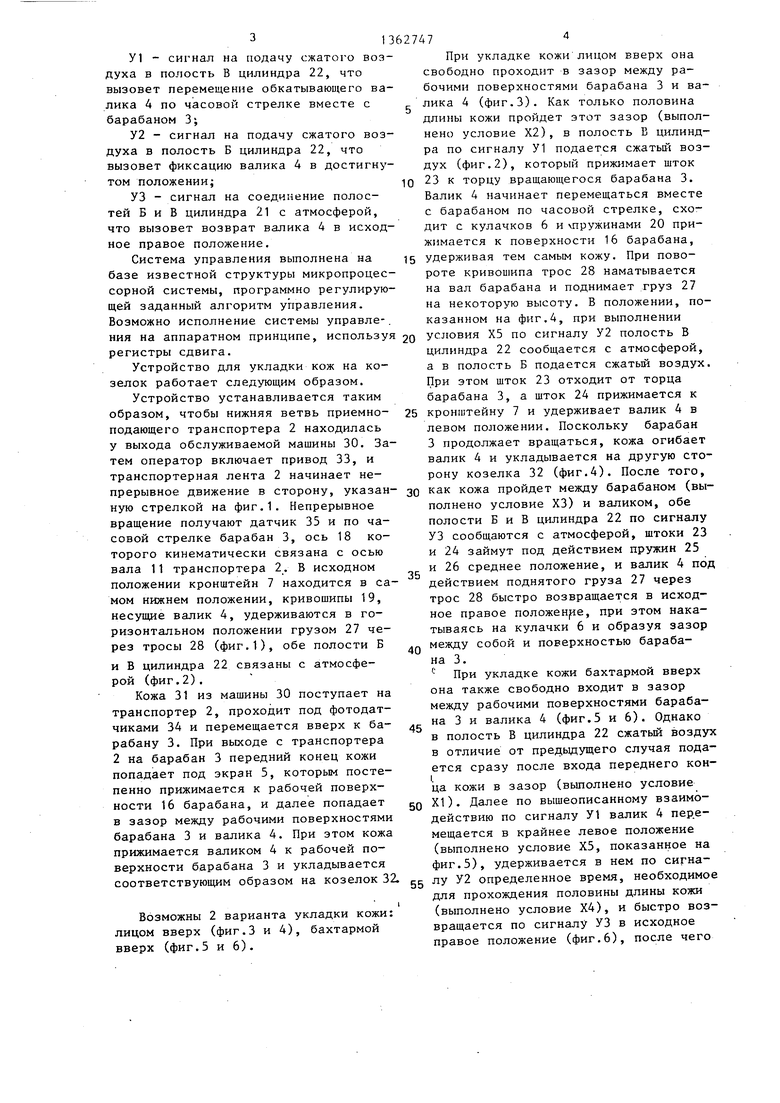
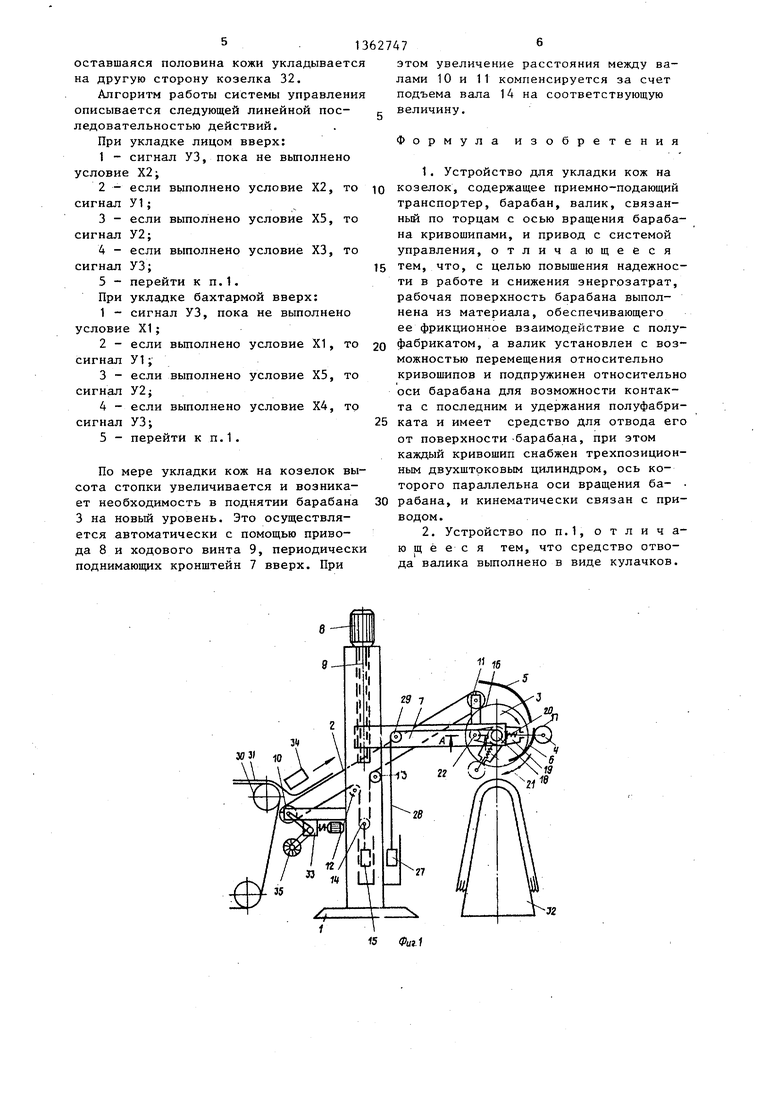
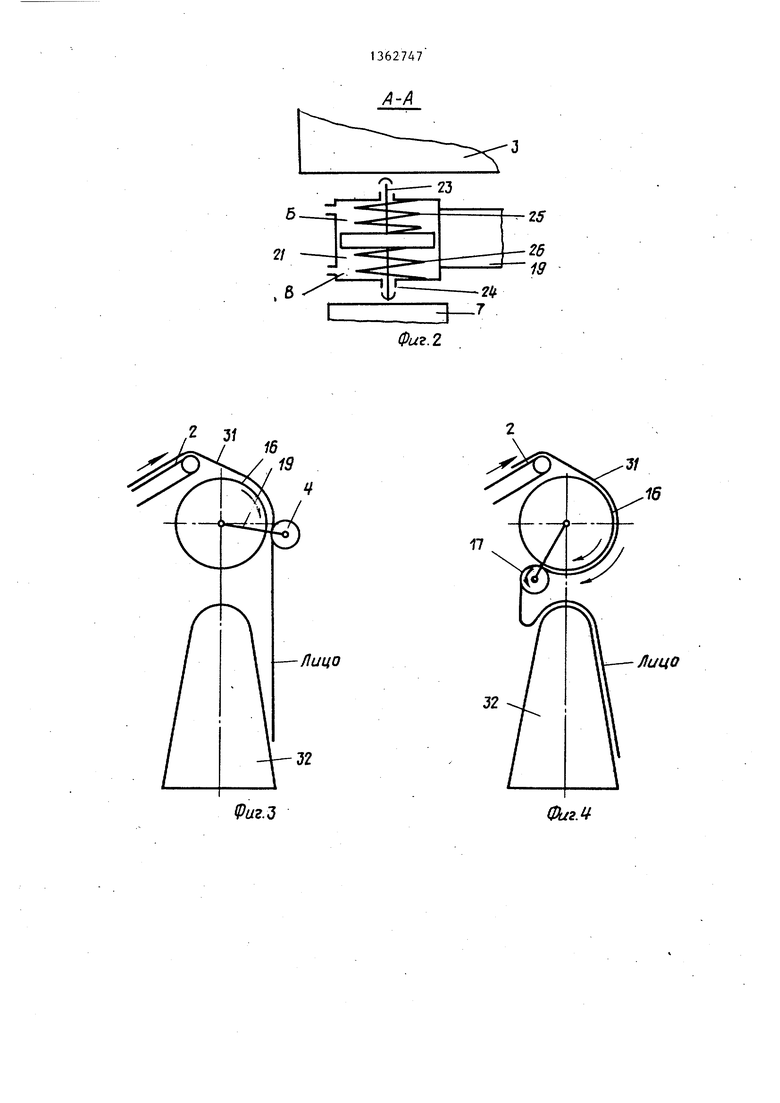
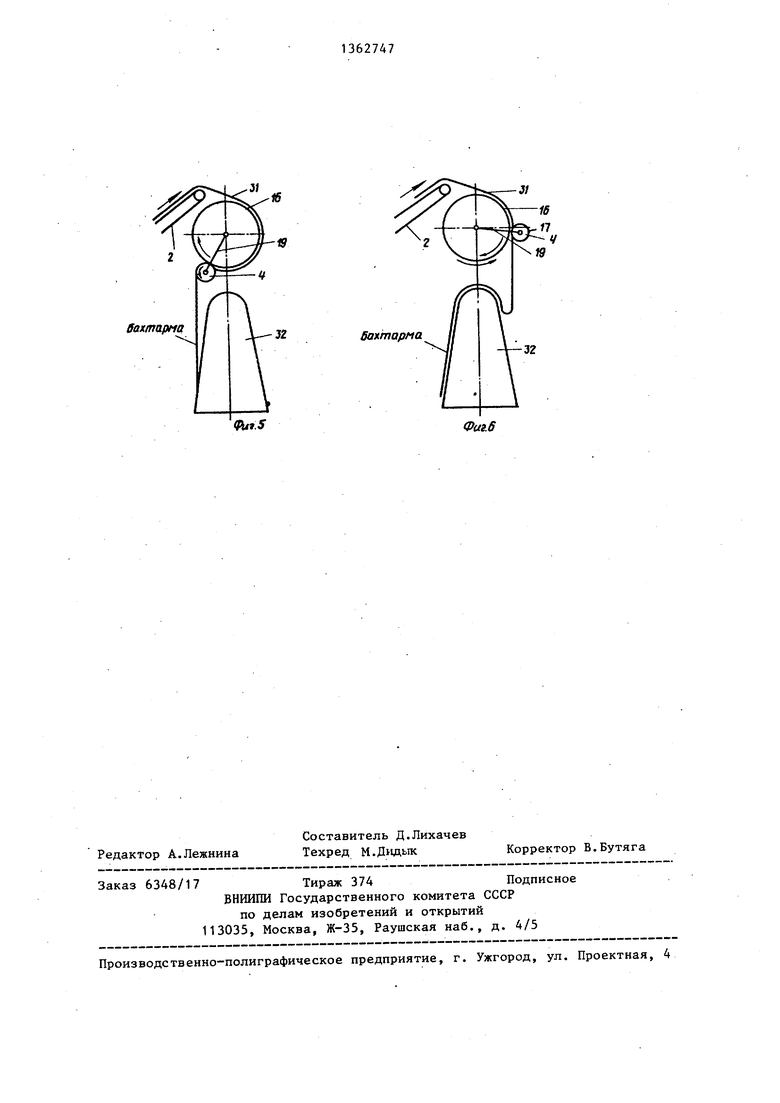
На фиг.1 показана принципиальная схема предлагаемого устройства; на фиг.2 - разрез А-А на фиг.1; на фиг.З и 4 - последовательность взаимодействия с кожей рабочих органов устройства при укладке кож на козело лицевой поверхностью вверх; на фиг.5- и 6 - последовательность взаимодействия с кожей рабочих органов устройства при укладке кожи на козелок бахтармой вверх. I
Устройство включает остов 1, приемно-подающий транспортер 2, барабан 3 с рабочим диаметром, превышающим ширину хребта козелка, валик 4, обкатывающийся по барабану 3, гладкий экран 5, установленный над барабаном с неравномерным уменьшающимся в сторону вращения барабана зазором от его рабочей поверхности, два неподвижных кулачка 6, установленных у торцов барабана 3. Барабан 3, гладкий экран 5 и кулачки 6 установлены на подвижном в вертикальном направлении кронштейне 7, привод 8 перемещения которого установлен на остове 1 и кинематически связан с кронштейном ходовым винтом 9. Нижний вал 10 прием.но- подающего транспортера 2 установлен на остове 1, а верхний вал 11 - на подвижном кронштейне 7. Нижняя ветвь транспортера имеет компенсирующее устройство, состоящее из двух установленных на остове валов 12, 13 и вала 14. Натяжение ленты транспортер осуществляется грузом 15, подвешенным к валу 14. Барабан 3 выполнен с воздухонепроницаемой рабочей поверхностью 16, обтянутой материалом, обеспечивающим его фрикционное взаимодействие с полуфабрикатом, а- обкатывающийся валик 4 имеет гладкую поверхность 17 и связан по торцам с осью 18 вращений барабана кривошипами 19, обладающими продольной упругостью благодаря пружинам 20 и 21. Каждый кривошип снабжен трехпозици
10
16
20
25
3627472
онным цилиндром 22, имеющим два штока 23 и 24 и пружины 25 и 26 сжатия. Ось цилиндра параллельна оси вращения барабана. Каждый кривошип 19 кинематически связан с механизмом возврата валика в исходное положение, выполненным в виде груза 27, связанного тросом 28, перекинутым через блок 29, с кривошипом 19. Нижний вал 10 приемно-подающего транспортера устанавливается у выходного конца транспортера обслуживаемой машины 30, по которому поступают кожи 31. Под барабаном 3 устанавливается козелок 32. Устройство содержит привод 33 для приведения в действие транспортёра и барабана. Над транспортером 2 укреплены фотодатчики 34, фиксирующие наличие кожи при ее перемещении. С приводом 33 кинематически связан датчик 35 импульсов, который выдает тактовые сигналы в систему управления для дискретного определения текущих координат начала, середины и кожи относительно места установки фотодатчиков. Работа системы управления сводится к определению выполнения заданных условий и выдаче сигналов управления пневмоцилинд- рам 22.
Условия, определяемые системой управления, следующие:
Х1 - координата начала кожи достигла значения, соответствующего исходному правому положению валика 4 (положение валика 4 соответствует фиг.3),
Х2 - координата середины кожи достигла значения, при котором после перемещения валика 4 из исходного правого положения в крайнее левое (фиг.4) на правой стороне козелка уложится половина кожи лицом вверху
ХЗ - координата конца кожи достигла значения, соответствующего крайнему левому положению валика 4,
Х4 - координата середины кожи достигла значения, при котором после перемещения валика 4 из крайнего левого положения (фиг.5) в исходное правое (фиг.6) на левой стороне козелка уложится половина кожи бахтармой вверх,
Х5 - валик 4 достиг крайнего левого положения.
Выходные сигналы системы управления имеют следующее функциональное назначение:
30
35
40
45
50
55
31362747
подачу сжатого возУ1 - сигнал на духа в полость В цилиндра 22, что вызовет перемещение обкатывающего валика 4 по часовой стрелке вместе с барабаном 3;
У2 - сигнал на подачу сжатого воздуха в полость Б цилиндра 22, что вызовет фиксацию валика 4 в достигнутом положении;IQ
УЗ - сигнал на соединение полостей Б и В цилиндра 21 с атмосферой, что вызовет возврат валика 4 в исходное правое положение.
Система управления выполнена на 15 базе известной структуры микропроцессорной системы, программно регулирующей заданный алгоритм управления. Возможно исполнение системы управле-. ния на аппаратном принципе, используя 2о регистры сдвига.
Устройство для укладки кож на козелок работает следующим образом.
Устройство устанавливается таким образом, чтобы нижняя ветвь приемно- 25 подающего транспортера 2 находилась у выхода обслуживаемой машины 30. Затем оператор включает привод 33, и транспортерная лента 2 начинает непрерывное движение в сторону, указан- зо ную стрелкой на фиг.1. Непрерывное вращение получают датчик 35 и по часовой стрелке барабан 3, ось 18 которого кинематически связана с осью вала 11 транспортера 2. В исходном положении кронштейн 7 находится в самом нижнем положении, кривощипы 19, несущие валик 4, удерживаются в горизонтальном положении грузом 27 через тросы 28 (фиг.1), обе полости Б
и В цилиндра 22 связаны с атмосферой (фиг.2).
Кожа 31 из машины 30 поступает на транспортер 2, проходит под фотодатчиками 34 и перемещается вверх к ба- 5 рабану 3. При выходе с транспортера 2 на барабан 3 передний конец кожи попадает под экран 5, которым постепенно прижимается к рабочей поверхности 16 барабана, и далее попадает gQ в зазор между рабочими поверхностями барабана 3 и валика 4. При этом кожа прижимается валиком 4 к рабочей поверхности барабана 3 и укладывается
35
40
При укладке кожи лицом вверх она свободно проходит в зазор между рабочими поверхностями барабана 3 и валика 4 (фиг.З). Как только половина длины кожи пройдет этот зазор (выполнено условие Х2), в полость В цилиндра по сигналу У1 подается сжатый воздух (фиг.2), который прижимает шток 23 к торцу вращающегося барабана 3. Валик 4 начинает перемещаться вместе с барабаном по часовой стрелке, сходит с кулачков 6 и пружинами 20 прижимается к поверхности 16 барабана, удерживая тем самым кожу. При повороте кривошипа трос 28 наматывается на вал барабана и поднимает груз 27 на некоторую высоту. В положении, показанном на фиг.4, при выполнении условия Х5 по сигналу У2 полость В цилиндра 22 сообщается с атмосферой, а в полость Б подается сжатый воздух. При этом шток 23 отходит от торца барабана 3, а шток 24 прижимается к кронштейну 7 и удерживает валик 4 в левом положении. Поскольку барабан 3 продолжает вращаться, кожа огибает валик 4 и укладывается на другую сторону козелка 32 (фиг.4). После того, как кожа пройдет между барабаном (выполнено условие ХЗ) и валиком, обе полости Б и В цилиндра 22 по сигналу УЗ сообщаются с атмосферой, штоки 23 и 24 займут под действием пружин 25 и 26 среднее положение, и валик 4 под действием поднятого груза 27 через трос 28 быстро возвращается в исходное правое положение, при этом накатываясь на кулачки 6 и образуя зазор между собой и поверхностью барабана 3.
При укладке кожи бахтармой вверх она также свободно входит в зазор между рабочими поверхностями барабана 3 и валика 4 (фиг.5 и 6). Однако в полость В цилиндра 22 сжатый воздух в отличие от предьздущего случая подается сразу после входа переднего конца кожи в зазор (вьшолнено условие XI). Далее по вышеописанному взаимодействию по сигналу У1 валик 4 пер.е- мещается в крайнее левое положение (выполнено условие Х5, показанное на фиг.5), удерживается в нем по сигнасоответствующим образом на козелок 32. - лу У2 определенное время, необходимое
для прохождения половины длины кожи I Возможны 2 варианта укладки кожи:
лицом вверх (фиг.З и 4), бахтармой вверх (фиг.5 и 6).
(выполнено условие Х4), и быстро возвращается по сигналу УЗ в исходное правое положение (фиг.6), после чего
5
5 о
5 Q
5
0
При укладке кожи лицом вверх она свободно проходит в зазор между рабочими поверхностями барабана 3 и валика 4 (фиг.З). Как только половина длины кожи пройдет этот зазор (выполнено условие Х2), в полость В цилиндра по сигналу У1 подается сжатый воздух (фиг.2), который прижимает шток 23 к торцу вращающегося барабана 3. Валик 4 начинает перемещаться вместе с барабаном по часовой стрелке, сходит с кулачков 6 и пружинами 20 прижимается к поверхности 16 барабана, удерживая тем самым кожу. При повороте кривошипа трос 28 наматывается на вал барабана и поднимает груз 27 на некоторую высоту. В положении, показанном на фиг.4, при выполнении условия Х5 по сигналу У2 полость В цилиндра 22 сообщается с атмосферой, а в полость Б подается сжатый воздух. При этом шток 23 отходит от торца барабана 3, а шток 24 прижимается к кронштейну 7 и удерживает валик 4 в левом положении. Поскольку барабан 3 продолжает вращаться, кожа огибает валик 4 и укладывается на другую сторону козелка 32 (фиг.4). После того, как кожа пройдет между барабаном (выполнено условие ХЗ) и валиком, обе полости Б и В цилиндра 22 по сигналу УЗ сообщаются с атмосферой, штоки 23 и 24 займут под действием пружин 25 и 26 среднее положение, и валик 4 под действием поднятого груза 27 через трос 28 быстро возвращается в исходное правое положение, при этом накатываясь на кулачки 6 и образуя зазор между собой и поверхностью барабана 3.
При укладке кожи бахтармой вверх она также свободно входит в зазор между рабочими поверхностями барабана 3 и валика 4 (фиг.5 и 6). Однако в полость В цилиндра 22 сжатый воздух в отличие от предьздущего случая подается сразу после входа переднего конца кожи в зазор (вьшолнено условие XI). Далее по вышеописанному взаимодействию по сигналу У1 валик 4 пер.е- мещается в крайнее левое положение (выполнено условие Х5, показанное на фиг.5), удерживается в нем по сигнадля прохождения половины длины кожи
(выполнено условие Х4), и быстро возвращается по сигналу УЗ в исходное правое положение (фиг.6), после чего
10
1362747
яся половина кожи укладывается ую сторону козелка 32.
ритм работы системы управления ется следующей линейной посельностью действий.
укладке лицом вверх:
сигнал УЗ, пока не вьтолнено Х2;
если вьтолнено условие Х2, то У1;
если выполнено условие Х5, то У2;
если выполнено условие ХЗ, то УЗ;
перейти к п.1.
укладке бахтармой вверх:
сигнал УЗ, пока не выполнено XI;
если вьтолнено условие XI, то У1;
если выполнено условие Х5, то У2;
если выполнено условие Х4, то УЗ;
перейти к п.1.
эт ла по ве
Ф
ко тр нь на уп те ти ра не ее 20 фа
15
25
мо кр ос та ка от ка ны то 30 ра во
По мере укладки кож на козелок высота стопки увеличивается и возникает необходимость в поднятии барабана 3 на новый уровень. Это осуществляется автоматически с помощью привода 8 и ходового винта 9, периодически поднимающих кронштейн 7 вверх. При
этом увеличение расстояния между валами 10 и 11 компенсируется за счет подъема вала 14 на соответствующую величину.
Формула изобретения
1. Устройство для укладки кож на козелок, содержащее приемно-подающий транспортер, барабан, валик, связан- ньй по торцам с осью вращения барабана кривошипами, и привод с системой управления, отличающееся тем, что, с целью повышения надежности в работе и снижения энергозатрат, рабочая поверхность барабана выполнена из материала, обеспечивающего ее фрикционное взаимодействие с полу- фабрикатом, а валик установлен с воз
5
можностью перемещения относительно кривошипов и подпружинен относительно оси барабана для возможности контакта с последним и удержания полуфабриката и имеет средство для отвода его от поверхности -барабана, при этом каждый кривошип снабжен трехпозицион- ным двухштрковым цилиндром, ось которого параллельна оси вращения ба- 0 рабана, и кинематически связан с приводом.
2. Устройство по П.1, отличающееся тем, что средство отвода валика выполнено в виде кулачков.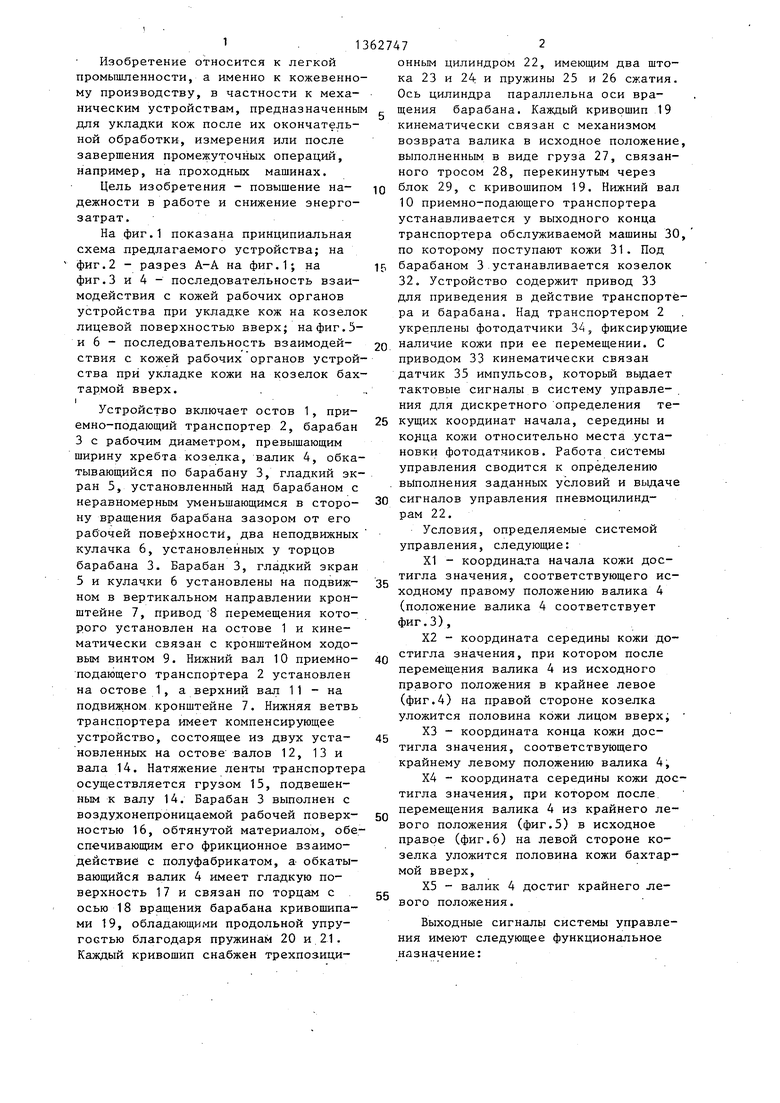
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи кож к обрабатывающему агрегату | 1985 |
|
SU1326520A1 |
| Устройство для укладки кож на козелок | 1986 |
|
SU1377298A1 |
| Устройство для укладки листовых материалов, например кож, на козелки | 1960 |
|
SU137221A1 |
| Устройство для укладки кож на козелок | 1984 |
|
SU1227674A2 |
| Устройство для укладки кож на козелок | 1978 |
|
SU672211A1 |
| Устройство для захвата изделий | 1983 |
|
SU1118679A1 |
| Устройство для подачи и укладки кож в стопу | 1988 |
|
SU1673498A1 |
| Устройство для транспортировки листов гибкого материала | 1982 |
|
SU1089125A1 |
| Устройство для подачи и приема кож к обрабатывающему агрегату | 1981 |
|
SU1060682A1 |
| Устройство для укладки кож | 1979 |
|
SU885262A1 |
Изобретение относится к легкой промышленности. Цель изобретения - повышение надежности в работе и снижение энергозатрат. Приемно-подающий транспортер служит для подачи кож на барабан, с осью вращения которого через кривошипы связан валик. Рабочая поверхность барабана выполнена из материала, обеспечивающего ее фрикционное взаимодействие с полуфабрикатом. Валик установлен с возможностью перемещения относительно кривошипов и подпружинен относительно оси барабана для возможности контакта с последним. Имеется средство для отвода валика от поверхности барабана, выполненное в виде кулачков. Каждый кривошип связан с приводом и снабжен трех- позиционным двухштоковым цилиндром, ось которого параллельна оси вращения барабана. 1 з.п. ф-лы, 6 ил. (/)
з;
i; 15
J2
Фиг.1
-25
Фиг. 2
,2 Л
-/1ицо
3/
/ i/LfO
1риг.З
ffaxmapna
32
Фиг5
31
16
Вахтарма
Фиг.6
Редактор А.Лежнина
Составитель Д.Лихачев Техред М.Дидык
Заказ 6348/17Тираж 374Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор В.Бутяга
| Г-СЕСОЮЗНАЯ•ATtliMO-«I BJHI-BItU-4«" Т1Ш1Ч1!С1|А» '•»М."МТГ1А | 0 |
|
SU142899A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
