Фиг.1
Изобретение относится к преобразователям возвратно-поступательного или колебательного движения во вращательное и может быть использовано в машиностроении и двигателестроении.
Целью изобретения является упрощение конструкции и расширение кинематических возможностей.
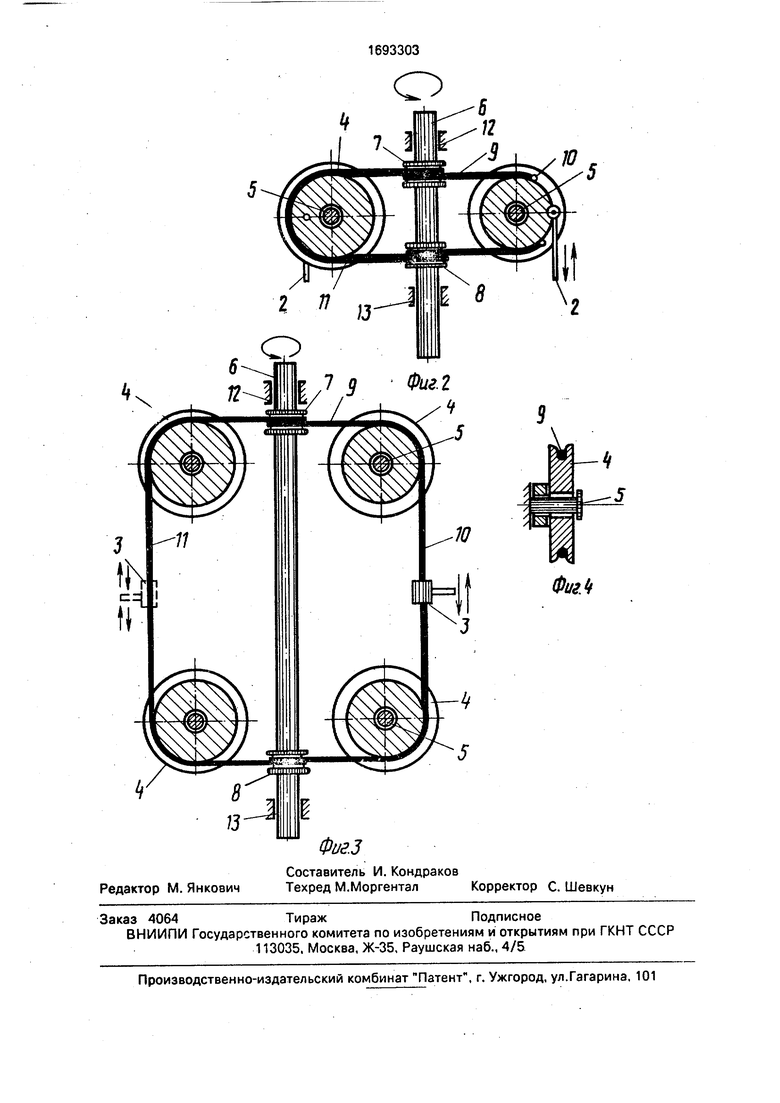
На фиг.1 изображен преобразователь с одним промежуточным шкивом; на фиг.2 - то же, с двумя промежуточными шкивами и шатунами; на фиг.З - то же, с двумя ветвями и приводами в виде ползунов; на фиг.4 - промежуточный шкив, поперечный разрез.
Преобразователь возвратно-поступательного движения во вращательное содержит приводы возвратно-поступательного движения 1 (показаны условно), например, в виде шатуна 12 (фиг.2) или ползуна 3 (фиг.З), промежуточные шкивы 4 на осях 5, ведомый вал 6 с двумя шкивами 7 и 8 и охватывающую шкивы 4, 7 и 8 гибкую связь 9 из эластичного материала, связанную с приводом 1 (2 или 3) возвратно-поступательного движения. При этом шкивы 7 и 8 ведомого вала 6 охвачены каждый по крайней мере одним витком гибкой связи 9 с направлением навивки, противоположным соседнему шкиву, с образованием двух ветвей 10 и 11, каждая из которых связана с приводом 1 (2 или 3) возвратно-поступательного движения. Ведомый вал б опирается на опоры 12 и 13. Для уменьшения габаритов преобразователя промежуточные шкивы 4 (фиг.2 и 3) расположены на общей для них оси 5.
Преобразователь возвратно-поступательного движения во вращательное работает следующим образом.
При сообщении приводом 1 (фиг.1) возвратно-поступательного или колебательного движения концам гибкой связи 9 усилием Р, направленным в сторону шкива 7, на шкиве ведомого вала 6 из-за натяжения гибкой связи 9 с усилием S возникает крутящий момент
M (P + S/2)kP,
где В - радиус шкива 7 и 8;
k - коэффициент трения пары материал гибкой связи - материал шкива,
а на шкиве 8 из-за движения конца гибкой связи 9 навстречу шкиву 8 крутящий момент на валу 6 близок к нулю - МКр
-RkS/2, т.е. крутящий момент, развиваемый на шкиве 7, испытывает сопротивление крутящего момента на шкиве 8 лишь от усилия сопротивления трения, возникающего
от усилия натяжения S гибкой связи Мкр -S/2kR. После изменения направления движения привода 1 на противоположное на шкиве 8 возникает крутящий момент Мкр такой же по величине и такой же по
направлению, как и крутящий момент МКр на шкиве 7. Далее цикл повторяется. При этом ведомый вал б непрерывно вращается в одну сторону.
Преобразователи, изображенные на
фиг.2 и 3, работают аналогично описанному. Но в этом случае возвратно-поступательное движение передается шатуну 2 (фиг. 2) или ползуну 3 (фиг. 3), например, ветви 10. Для изменения направления вращения вала б на
противоположное, возвратно-поступательное движение передается через приводы другой ветви, т.е. ветви 11. При этом изменение направления вращения происходит безынерционно.
Предлагаемый преобразователь позволяет изменять направление вращения ведомого вала в зависимости оттого, какой ветви передается возвратно-поступательное или колебательное движение. Другим преимуществом преобразователя является его без- ынерционность при изменении направления вращения ведомого вала.
Формула изобретения
Преобразователь возвратно-поступательного движения во вращательное, содержащий привод возвратно-поступательного движения, промежуточные шкивы, ведомый зол с двумя шкивами и охватывающую шкивы гибкую связь, связанную с приводом возвратно-поступательного движения, отличающийся тем, что, с целью упрощения конструкции и расширения кинематических возможностей, гибкая связь выполнена из
эластичного материала, шкивы ведомого вала охвачены каждый по крайней мере одним зитком гибкой связи с направлением навивки, противоположным соседнему шкиву, с образованием двух ветвей, а привод возвратно-поступательного движения связан с по крайней мере одной ветвью.
Фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| МАРТЕНСИТНЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2041389C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| Механизм преобразования возвратно-поступательного движения в непрерывное вращательное | 2016 |
|
RU2629584C2 |
| МУСКУЛЬНЫЙ ПРИВОД | 2011 |
|
RU2557921C2 |
| Электродвигатель | 1991 |
|
SU1836779A3 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В НЕПРЕРЫВНОЕ ВРАЩАТЕЛЬНОЕ И МЕХАНИЗМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505722C2 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| ПЕДАЛЬНЫЙ ПРИВОД СУДНА, НАДУВНОЕ СУДНО, СПОСОБ ПЕРЕДВИЖЕНИЯ НАДУВНОГО СУДНА ПО ВОДЕ И СПОСОБ УСТАНОВКИ ПРИВОДА НА НАДУВНОЕ СУДНО | 2013 |
|
RU2608991C2 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1992 |
|
RU2011076C1 |
| Многовыходной преобразователь движения | 1989 |
|
SU1807272A1 |
Изобретение относится к преобразователям возвратно-поступательного или колебательного движения во вращательное и может быть использовано в машиностроении и двигателестроении.-Цель изобретения - упрощение конструкции и расширение кинематических возможностей 11 Ц за счет выполнения гибкой связи из эластичного материала и схвата шкивов ведомого вала по крайней мере одним витком гибкой связи. При сообщении приводом 1 возвратно-поступательного или колебательного движения концам гибкой связи 9 на шкиве 7 ведомого вала 6 из-за натяжения гибкой связи 9 возникает крутящий момент, а на шкиве 8 из-за движения конца гибкой связи 9 навстречу последнему крутящий момент будет близок к нулю. После изменения направления движения привода 1 на противоположное на шкиве 8 будет создан крутящий момент такой же по величине и направлению, что и крутящий момент на шкиве 7 до изменения направления движения привода 1. 4 ил. Ј ю о ю СА) СО о со 13
| Патент США № 4437677, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
