б W & Ж
HZ5--7
ел С
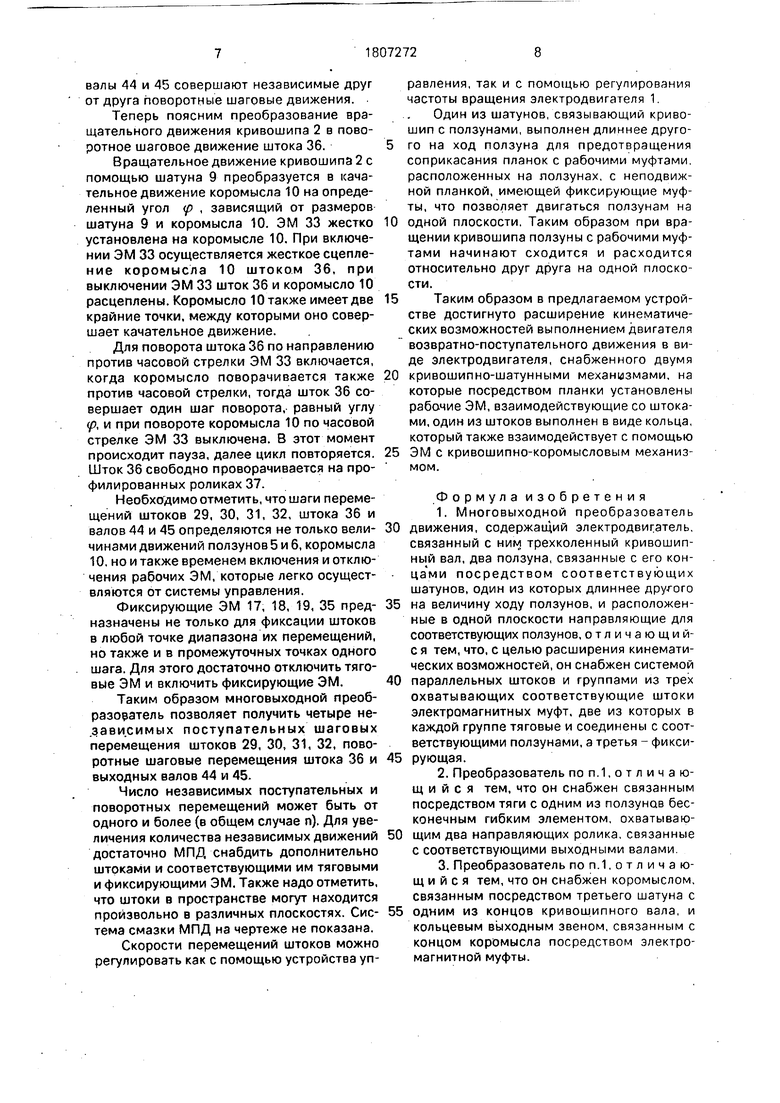
зуном 5, а фиксирующие ЭМ 20 жестко соединены между собой планкой и неподвижно установлены на опоре 22. Рабочие ЭМ 26 жестко соединены между собой планкой, а тягой 28-с ползуном 6. Штоки 29 выполнены из жесткого материала и взаимодействуют с рабочими и фиксирующими ЭМ. Рабочая ЭМ 33 установлена на коромысле 10 и с помощью фиксирующей ЭМ 34, установленной на неподвижной опоре 35, взаимодействует с жестким штоком 36, выполненным в виде кольца и свободно прово- рачивающимся на профилированных
роликах 37. Гибкий трос 39 выполнен в виде замкнутого контура на шкивах 40 и 41, установленных шарнирно на опорах 42 и 43 соответственно. Выходные валы 44 и 45 взаимодействуют со шкивами 40 и 41 с помощью ЭМ 46, 47, гибкий трос 39 связан с тягой 28 при помощи зажима 48. При работе электродвигателя 1 преобразователь позволяет получить на выходе несколько независимых поступательных шаговых перемещений штоков 29 и поворотные шаговые перемещения штока 36 и выходных валов 44, 45. 2 з.п. ф-лы, 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделки и укладки рыбы в банки | 1973 |
|
SU477712A1 |
| ШВЕЙНАЯ МАШИНА | 1971 |
|
SU414334A1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| ВИХРЕВОЙ КОНДИЦИОНЕР | 1994 |
|
RU2095699C1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
| МАШИНА ДЛЯ ШНУРОВАНИЯ ЗАГОТОВОК | 1950 |
|
SU90434A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1983 |
|
SU1176395A1 |
Изобретение относится к области робототехники и может быть использовано в качестве многовыходного преобразователя движения устройств с возвратно-поступательным, поступательным и угловым движением. Цель изобретения - расширение кинематических возможностей. Многовыходной преобразователь содержит электродвигатель 1, на валу которого установлен кривошип 2. Шатуны 3 и 4 шарнирно связаны с кривошипом 2 и ползунами 5 и 6, где последние совершают возвратно-поступательное движение на неподвижных направляющих 7 и 8. Шатун 9 шарнирно связан с кривошипом 2. и коромыслом 10. Рабочие электромагнитные муфты (ЭМ) 14 жестко соединены с помощью планки и тяги 16 с пол
Изобретение относится к машиностроению и может быть использовано в качестве привода устройств с возвратно-поступательным, поступательным и угловым движениями. .
Целью изобретения является расширение кинематических возможностей преобразователя движения.
Эта цель Достигается тем, что многовыходной преобразователь движения, содержащий электродвигатель, связанный с ним трехколенный кривошипный вал, два ползуна, связанные с его концами посредством соответствующих шатунов, один из которых длиннее другого на величину хода ползунов, и расположенные в одной плоскости направляющие для соответствующих ползунов, дополнительно снабжен системой параллельных штоков и группами из трех охватывающих соответствующие штоки электромагнитных муфт, две из которых в каждой группе тяговые и соединены с соответствующими ползунами, а третья фиксирующая, бесконечным гибким элементом, связанным посредством тяги с одним из ползунов, Охватывающим два направляющих ролика, связанных с соответствующими выходными валами, коромыслом, связанным посредством третьего шатуна с одним из концов кривошипного вала, и кольцевым выходным звеном, связанным с концом коромысла посредством электромагнитной муфты.
В отличие от прототипа в предлагаемом изобретении возвратно-поступательное движение одного ползуна посредством п+2 (.2,..,) управляемых электромагнитных муфт преобразуется в n-ное количество выходных независимых линейных движений неограниченного хода. Причем таких ползунов может быть несколько. Кроме того, можно реализовать любой закон движения выходных штоков при соответствующем управлении электромагнитными муфтами,
что существенно расширяет функциональные возможности.
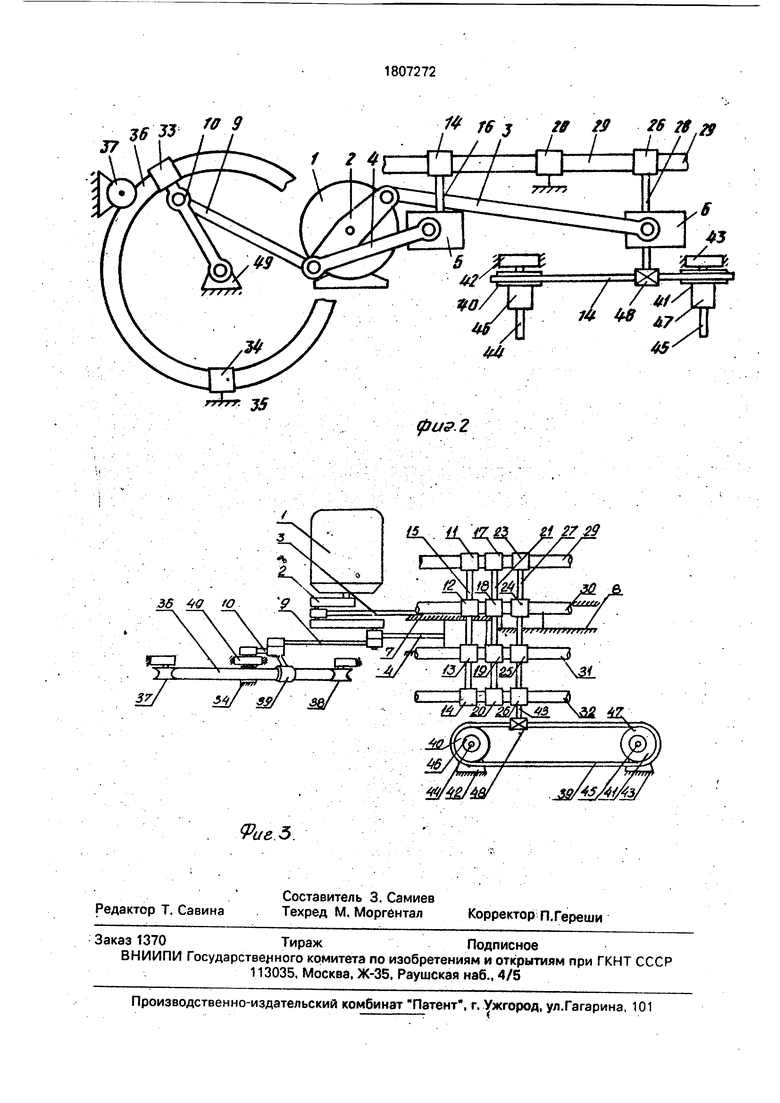
На чертежах приведен общий вид многовыходного преобразователя в двух позициях ползунов, когда они сходятся
относительно друг друга (фиг.1) и когда они расходятся при своих крайних точках (фиг.2), а на фиг.З приведен вид сверху.
Многовыходной преобразователь включает электродвигатель 1, на валу которого
установлен кривошип 2, шатуны 3 и 4, шарнирно связанные с кривошипом 2 и ползунами 5 и 6, где последние совершают возвратно-поступательное движение на неподвижных направляющих 7 и 8, шатун 9,
шарнирно связанный с кривошипом 2 и коромыслом 10, рабочие электромагнитные муфты (ЭМ) 11, 12,13, 14, жестко соединенные с помощью планки 15 и тяги 16 с ползуном 5, фиксирующие ЭМ 17, 18, 19, 20,
жестко соединенные друге другом планкой 21 и неподвижно установленные на опоре 22, рабочие ЭМ 23, 24, 25, 26, жестко соединенные планкой 27, и тягой 28 с ползуном 6, штоки 29, 30, 31 и 32, выполненные из
жесткого материала и взаимодействующие с рабочими и фиксирующими ЭМ, рабочую ЭМ 33, установленную на коромысло 10, и фиксирующую ЭМ 34,°установленную на неподвижной опоре 35, жесткий шток 36,
выполненный в виде кольца, взаимодействующий с рабочими и фиксирующими ЭМ 33 и 34, свободно проворачивающийся на профилированных роликах 37 и 38, гибкий трос (ремень) 39, выполненный в виде замкнутого контура на шкивах 40 и 41, установленные
шарнирно на опорах 42 и 43 соответственно, выходные валы 44 и 45, взаимодействующие со шкивами 40 и 41 с помощью ЭМ 46 и 47. Гибкий трос 39 жестко связан с планкой 28 при помощи зажима 48, коромысло 10 шарнирно установлено на опоре 49 и совершает качательное движение.
Таким образом МПД состоит из сочетания двух кривошипно-ползунных и одного кривошипно-коромыслового механизмов. Длины шатунов 3 и 4 выбраны таким образом, чтобы ползуны 5 и 6 и соответственно две группы рабочих ЭМ сходились и расходились относительно фиксирующих ЭМ на одинаковые расстЪяния.
МПД работает следующим образом.
Кривошипно-ползунный механизм служит для преобразования вращательного движения электродвигателя 1 и соответственно кривошипа 2 в возвратно-поступа- тельные движения ползунов 5 и 6, причем они расположены на одной плоскости и совершают синхронные движения, т.е. одновременно либо расходятся друг от друга на расстояние 2 S0 (S0 - расстояние полного хода одного ползуна),либо одновременно сходятся на такое же расстояние.
Кривошипно-коромысловый механизм служит для преобразования вращательного движения кривошипа 2 в качательное дви- жение коромысла 10 на определенный угол.
Принцип работы МПД заключается в преобразовании возвратно-поступательных движений ползунов 5 и 6 в поступательные, реверсивные, шаговые движения штоков 29, 30. 31, 32 и в поворотные шаговые движения валов 44 и 45, а также в преобразовании качательного движения коромысла- 10 в поворотное шаговое движение штока 36, выполненного в виде кольца с помощью автономно управляемых рабочих и фиксирующих ЭМ.
. Сначала поясним преобразование возвратно-поступательных движений ползунов 5 и 6 в четыре поступательные независимые движения штоков 29, 30, 31,32 и в два независимые поворотные движения валов 44, 45. Причем законы изменения каждого штока могут быть различными.
Штоки 29, 30, 31 и 32 свободно переме- щаются на направляющих 7 и 8. При включении рабочих и фиксирующих ЭМ они сцепляются со штоками и при отключении их они расцепляются.
Допустим штоки 29, 30,31 и 32 одновре- менно совершают движение влево и в исходном положении ползуны 5 и 6 находятся в крайних точках, когда центры шарниров кривошипа и шатуна располагаются на одной линии на минимально удаленном друг
от друга расстоянии (фиг.1). В этот момет фиксирующие ЭМ 17, 18, 19, 20 включены и отключаются рабочие ЭМ 23, 24, 25. 26. Л рабочие ЭМ 11, 12. 13, 14 включены, электродвигатель 1 вращается по направлению часовой стрелки.
При этом надо отметить, что для каждого ползуна имеется по две крайних точки первая точка,когда (левое крайнее положение), вторая точка, когда (правое крайнее положение). Когда для ползуна 5, то для ползуна 6 и наоборот.
В момент.,когда ползуны 5 и 6 максимально расходятся друг от друга (вторые крайние точки, фиг.2 рабочие ЭМ 11, 12,13, 14 выключаются, а ЭМ 23, 24, 25, 26 включаются. При этом штоки 29, 30, 31, 32 совершают один шаг влево и начинают совершать второй шаг влево за счет движения ползуна 6 влево и т.д.
Перемещение штоков направо осуществляется с другой последовательностью включения и отключения рабочих ЭМ.
Осуществляя управление ЭМ по различным законам можно получить различные независимые друг от друга движения штоков 29,30,31,32.
Рассмотрим преобразование возвратно-поступательного движения ползуна 6 в поворотные шаговые движения валов 44 и 45.
Гибкий трос 39, выполненный в виде замкнутого контура на шкивах 40 и 41, жестко соединен с помощью зажима 48 с ползуном 6 посредством планки 27 и он также совершает возвратно-поступательное движение.
При этом шкивы 40 и 41 также совершают попеременные поворотные движения, которые посредством управляемых ЭМ 46 и 47 преобразуются в шаговые поворотные движения валов 44 и 45.
Допустим, необходимо получить поворотные движения по направлению часовой стрелки вала 44 и наоборот вала 45.
В момент движения ползуна 6 из крайнего правого положения () в левое крайнее положение () ЭМ 47 включена и вал 45 вместе со шкивом 41 поворачивается на один шаг против часовой стрелки, а муфта 48 выключена, вал 44 неподвижен. При движении ползуна вправо (из левого положения) ЭМ 46 включена, вал 44 совершает один шаг поворотного движения по направлению часовой стрелки, а ЭМ 47 выключена. вал неподвижен (холостой ход), и цикл повторяется далее. В отличие от штоков 29.30. 31, 32 валы 44 и 45 совершают поворотные движения с паузами в момент возвращения ползуна в сходное положение. При этом
валы 44 и 45 совершают независимые друг от друга поворотные шаговые движения. . Теперь поясним преобразование вращательного движения кривошипа 2 в поворотное шаговое движение штока 36.
Вращательное движение кривошипа 2 с помощью шатуна 9 преобразуется в кача- тельное движение коромысла 10 на определенный угол р , зависящий от размеров шатуна 9 и коромысла 10. ЭМ 33 жестко установлена на коромысле 10. При включении ЭМ 33 осуществляется жесткое сцепление коромысла 10 штоком 36, при выключении ЭМ 33 шток 36 и коромысло 10 расцеплены. Коромысло 10 также имеет две крайние точки, между которыми оно совершает качательное движение.
Для поворота штока 36 по направлению против часовой стрелки ЭМ 33 включается, когда коромысло поворачивается также против часовой стрелки, тогда шток 36 совершает один шаг поворота, равный углу р, и при повороте коромысла 10 по часовой стрелке ЭМ 33 выключена. В этот момент происходит пауза, далее цикл повторяется. Шток 36 свободно проворачивается на профилированных роликах 37.
Необходимо отметить, что шаги перемещений штоков 29, 30, 31, 32, штока 36 и валов 44 и 45 определяются не только величинами движений ползунов 5 и 6, коромысла 10, но и также временем включения и отключения рабочих ЭМ, которые легко осуществляются от системы управления.
Фиксирующие ЭМ 17, 18, 19, 35 предназначены не только для фиксации штоков в любой точке диапазона их перемещений, но также и в промежуточных точках одного шага. Для этого достаточно отключить тяговые ЭМ и включить фиксирующие ЭМ.
Таким образом многовыходной преобразователь позволяет получить четыре независимых поступательных шаговых перемещения штоков 29, 30, 31, 32, поворотные шаговые перемещения штока 36 и выходных валов 44 и 45.
Число независимых поступательных и поворотных перемещений может быть от одного и более (в общем случае п). Для увеличения количества независимых движений достаточно МПД снабдить дополнительно штоками и соответствующими им тяговыми и фиксирующими ЭМ. Также надо отметить, что штоки в пространстве могут находится произвольно в различных плоскостях. Система смазки МПД на чертеже не показана. Скорости перемещений штоков можно регулировать как с помощью устройства управления, так и с помощью регулирования частоты вращения электродвигателя 1.
Один из шатунов, связывающий кривошип с ползунами, выполнен длиннее другого на ход ползуна для предотвращения соприкасания планок с рабочими муфтами. расположенных на лолзунах, с неподвижной планкой, имеющей фиксирующие муфты, что позволяет двигаться ползунам на
одной плоскости. Таким образом при вращении кривошипа ползуны с рабочими муфтами начинают сходится и расходится относительно друг друга на одной плоскости.
Таким образом в предлагаемом устройстве достигнуто расширение кинематических возможностей выполнением двигателя возвратно-поступательного движения в виде электродвигателя, снабженного двумя
кривошипно-шатунными механизмами, на которые посредством планки установлены рабочие ЭМ, взаимодействующие со штоками, один из штоков выполнен в виде кольца, который также взаимодействует с помощью
ЭМ с кривошипно-коромысловым механизмом.
.Ф о р м у л а и з о б р е т е н и я
движения, содержащий электродвигатель, связанный с ним трехколенный кривошипный вал, два ползуна, связанные с его кон- ца ми посредством соответствующих шатунов, один из которых длиннее другого
на величину ходу ползунов, и расположенные в одной плоскости направляющие для соответствующих ползунов, отличающий- с я тем, что, с целью расширения кинематических возможностей, он снабжен системой
параллельных штоков и группами из трех охватывающих соответствующие штоки электромагнитных муфт, две из которых в каждой группе тяговые и соединены с соответствующими ползунами, а третья - фиксирующая.
фиэ.2
| Артоболевский А.А | |||
| Механизмы в современной технике, т,II, М.: Наука, 1971, с.557, фиг | |||
| Способ работы тепловой машины | 1924 |
|
SU1659A1 |
| Тоже, с | |||
| Мусоросжигательная печь | 1923 |
|
SU495A1 |
| Артоболевский А.А | |||
| Механизмы е современной технике, Т.II, М.: Наука, 1979, с.491, фиг.1504. | |||
