ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Электронно-кодовый замок | 1989 |
|
SU1776745A1 |
| Устройство для контроля движения транспортных средств | 1986 |
|
SU1397957A2 |
| Устройство для централизованного измерения скорости вращения многошпиндельных механизмов планетарного типа | 1984 |
|
SU1216729A1 |
| Устройство для контроля цифровыхблОКОВ | 1978 |
|
SU798842A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТИПОВ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА | 2012 |
|
RU2546925C2 |
| Информационное устройство | 1987 |
|
SU1564066A1 |
| Устройство для измерения частоты вращения | 1981 |
|
SU1013857A1 |
| Цифровой фазометр | 1984 |
|
SU1234782A1 |
| Устройство для измерения скорости | 1989 |
|
SU1673981A1 |
| Устройство для сортировки | 1989 |
|
SU1633428A1 |
Изобретение относится к бурению скважин и позволяет повысить точность определения положения элеватора. В устройстве с датчика 6i скорости вращения лебедки поступает информация о числе оборотов лебедки в том или ином направлении. Сигнал числа оборотов подается на счетные входы сдвиговых регистров (Р) 12-14, которые управляют работой индикаторов 15-17, Направление движения элеватора вверх или вниз (направление вращения лебедки) учитывается подачей сигнала на вход Сдвиг вправо или Сдвиг влево Р 12-14. Каждый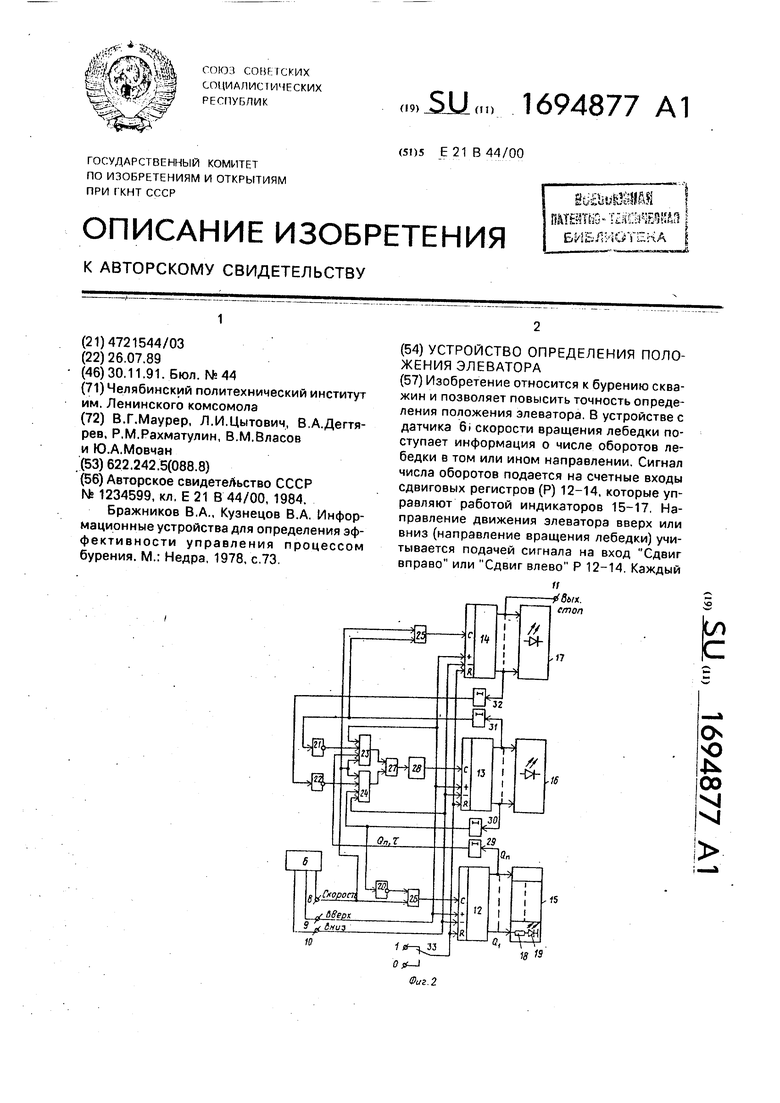
ON Ю 00 XI
XI
Р фиксирует перемещение элеватора в определенной зоне. В средней зоне хорошей видимости для увеличения дискретности отсчета сигнал на счетный вход Р 13 подается через делитель 28 частоты. ПоследовательИзобретение относится к бурению скважин ы, а именно к устройствам автоматизации процессов спуско-подъемных операций (СПО).
Целью изобретения является повышение точности определения положения элеватора.
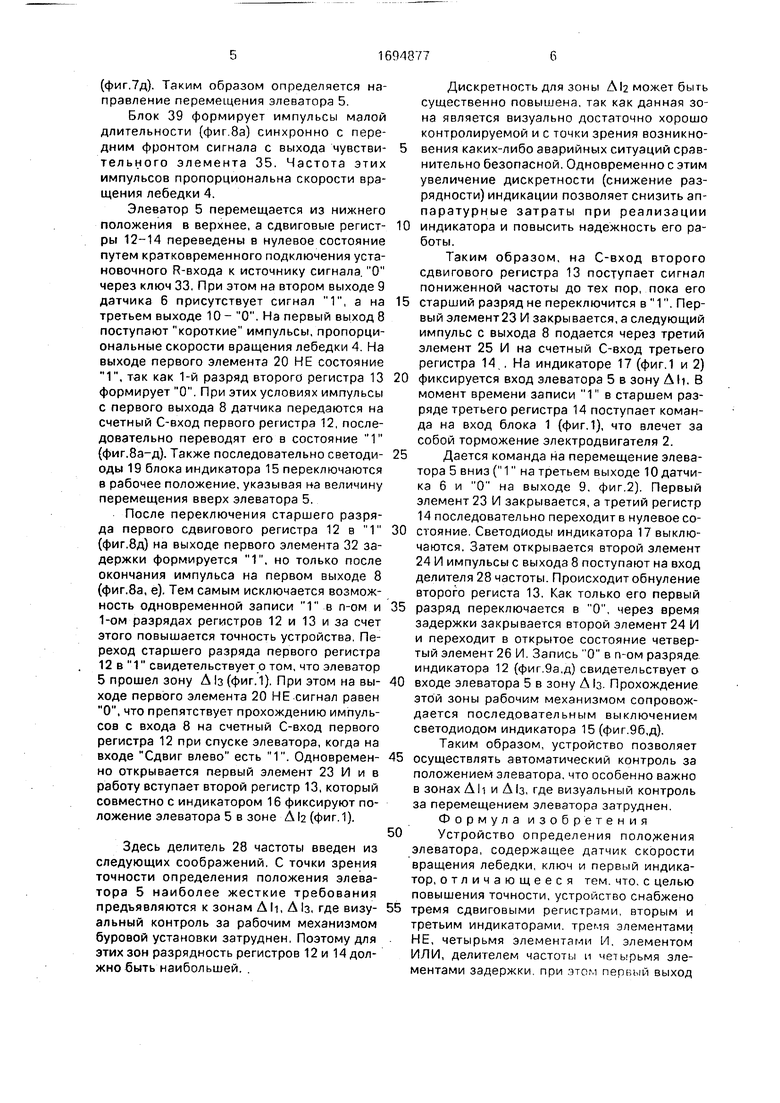
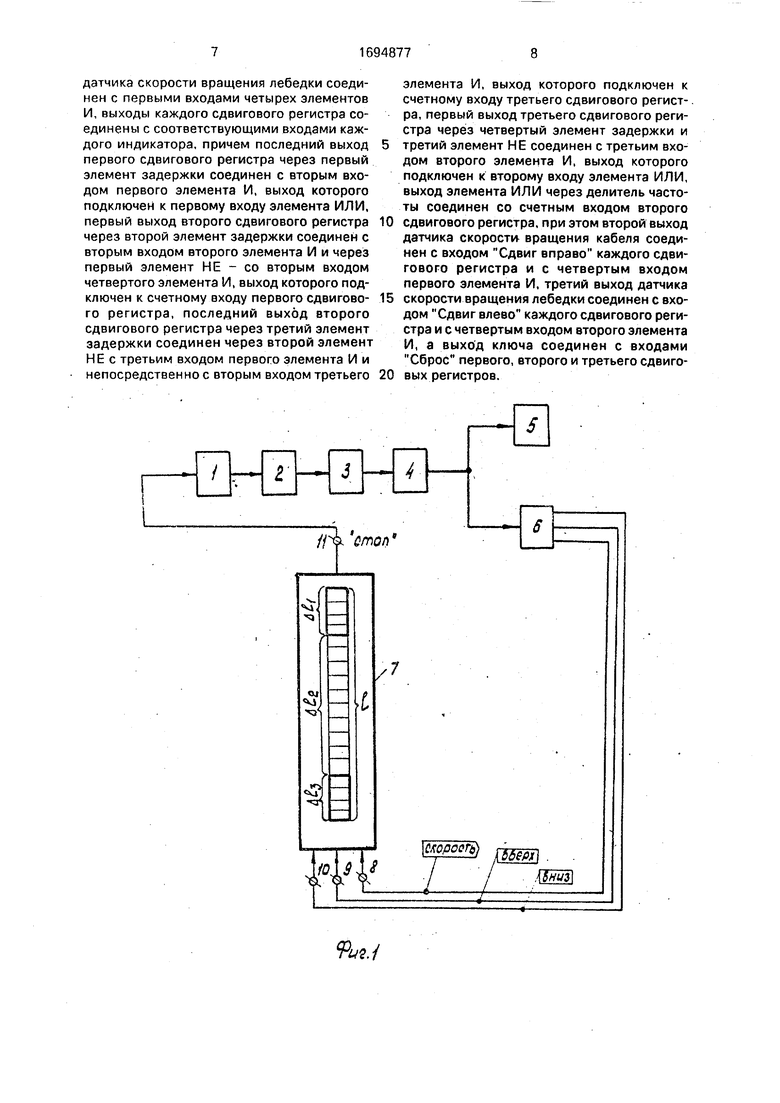
На фиг.1 изображена общая блок- схема устройства СПО; на фиг.2 - функциональная схема устройства определения положения элеватора; на фиг.З - схема датчика скорости вращения лебедки; на фиг.4 9 - время-импульсные диаграммы работы элементов устройства.
В состав устройства СПО входят (фиг.1) источник 1 электропитания, исполнитель- ный электродвигатель.2, редуктор 3, лебедка 4, элеватор 5 и датчик 6 скорости вращения лебедки, составляющий с блоком 7 индикации устройство определения положения элеватора. Датчик б соединен с блоком 7 индикации тремя входами, обозначенными соответственно 8, 9 и 10, Блок 7 индикации имеет выход 11 для аварийного отключения лебедки.
Блок 7 (фиг.1) индикации содержит (фиг.2) три сдвиговых регистра 12-14, три индикатора 15-17 на основе токоограничи- вающего резистора 18 и светодиода 19, три элемента НЕ 20-22, четыре элемента И 23- 26, элемент 27- ИЛИ, делитель 28 частоты, четыре элемента задержки 29-32, а также ключ 33.
Частотно-импульсный датчик 6 скорости вращения лебедки выполнен следующим образом (фиг.З).
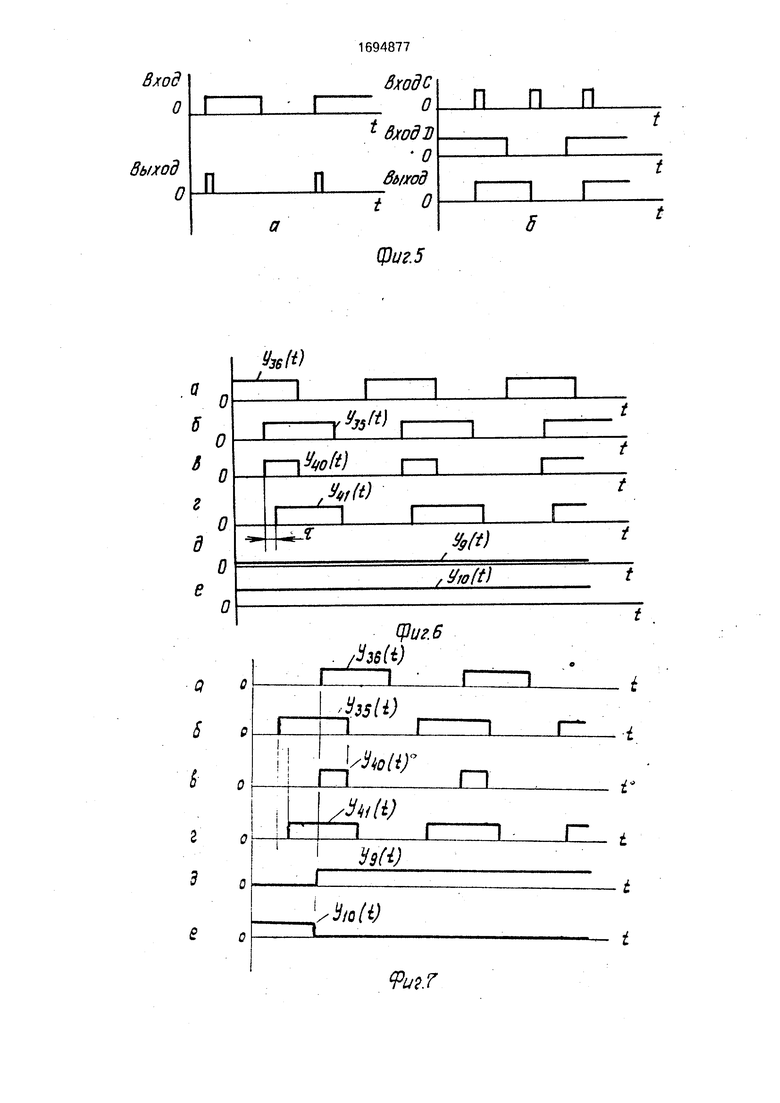
К внешней стороне лебедки 4 приварена металлическая пластина 34 (фиг.За). Индуктивные чувствительные элементы 35 и 36 переключаются через клеммы 37 и 38 в состояние 1 в момент времени, когда при вращении лебедки 4 пластина 34 проходит около них. Кроме того, датчик 6 скорости вращения лебедки содержит генератор 39 одиночных импульсов (фиг,36), элемент 40 И, элемент 41 задержки и триггер 42.
Сдвиговые, регистры 12-14 последовательно, начиная с первого разряда в режиме Сдвиг влево, переходят в единичное состояние синхронно с передним фронтом
ность заполнения Р регулируется элементами НЕ 20-22, а также элементами И 23-26. Элементы задержки 29-32 служат для исключения одновременной записи или стирания информации в соседних Р. 9 ил.
импульсов на С-входе (1 на + входе, О на - входе (фиг.4а). В режиме Сдвиг влево (1 на - входе, О на + входе). Синхронно передним фронтом счетных
импульсов сдвиговый регистр последовательно переходит в нулевое состояние, начинает с n-го разряда и заканчивая 1-м разрядом.
Принцип работы устройства следующий.
Источник 1 электропитания совместно с системой управления (не показана) осуществляют регулирование параметров исполнительного электродвигателя 2. С его
помощью через редуктор 3 и лебедку 4 производится перемещение в вертикальной плоскости элеватора 5 (фиг,1). Контроль за величиной перемещения блока 5 производится с помощью блока 7 индикации, к входам которого подключены выходы частотно-импульсного датчика 6 скорости вращения лебедки. Рассмотрим работу последнего.
При вращении лебедки 4 по часовой
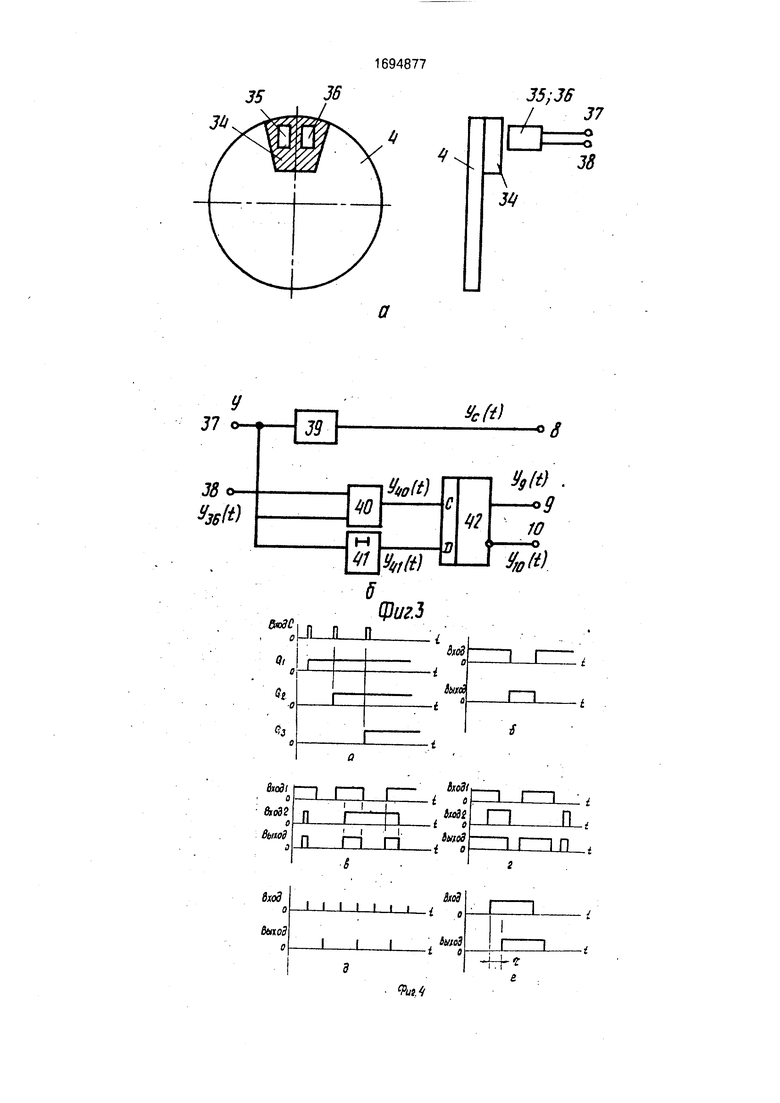
стрелке выходной сигнал чувствительного элемента 36 (фиг.ба) опережает по фазе импульс с выхода элемента 35 (фиг.бб). С помощью элемента 40 И выделяются импульсы (фиг.бв), длительность которых соответствует времени совпадения уровней сигналов 1 на клеммах 37, 38. Элемент 41 задержки,сдвигает входной сигнал с клеммы 37 (фиг.бб) на фиксированную по времени величину (фиг.бг),
( Так как передний фронт выходного импульса элемента 40 соответствует О на D- входе (фиг.бв,г), триггер 42 переключается в нулевое состояние (фиг.бд). Данный режим считаем в дальнейшем соответствующим
перемещению элеватора 5 вниз.
При вращении лебедки 4 в противоположном направлении импульсы с выхода элемента 36 (фиг.7а) отстают по фазе от импульсов, поступающих с выхода элемента 35 (фиг.76), осуществляется режим подъема элеватора 5. В результате передний фронт сигнала на выходе элемента 40 И (фиг.7в) совпадает с 1 на D-входе (фиг.7г), что пе0 реводит триггер 42 в единичное состояние
(фиг.7д). Таким образом определяется направление перемещения элеватора 5.
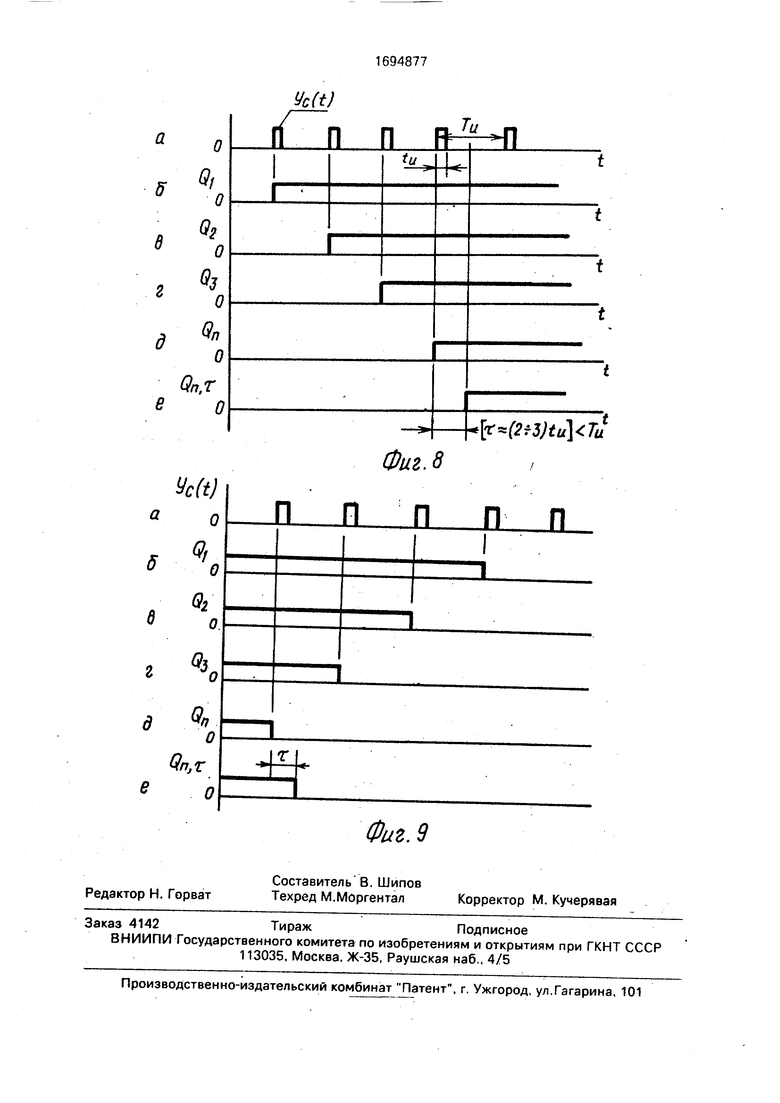
Блок 39 формирует импульсы малой длительности (фиг 8а) синхронно с передним фронтом сигнала с выхода чувствительного элемента 35. Частота этих импульсов пропорциональна скорости вращения лебедки 4.
Элеватор 5 перемещается из нижнего положения в верхнее, а сдвиговые регистры 12-14 переведены в нулевое состояние путем кратковременного подключения установочного R-входа к источнику сигнала. О через ключ 33, При этом на втором выходе 9 датчика 6 присутствует сигнал 1, а на третьем выходе 10 - О. На первый выход 8 поступают короткие импульсы, пропорциональные скорости вращения лебедки 4. На выходе первого элемента 20 НЕ состояние 1, так как 1-й разряд второго регистра 13 формирует О. При этих условиях импульсы с первого выхода 8 датчика передаются на счетный С-вход первого регистра 12, последовательно переводят его в состояние 1 (фиг.8а-д). Также последовательно светоди- оды 19 блока индикатора 15 переключаются в рабочее положение, указывая на величину перемещения вверх элеватора 5.
После переключения старшего разряда первого сдвигового регистра 12 в 1 (фиг.вд) на выходе первого элемента 32 задержки формируется 1, но только после окончания импульса на первом выходе 8 (фиг.8а, е). Тем самым исключается возможность одновременной записи 1 в n-ом и 1-ом разрядах регистров 12 и 13 и за счет этого повышается точность устройства, Переход старшего разряда первого регистра 12 в 1 свидетельствует о том, что элеватор 5 прошел зону Д з (фиг. 1). При этом на выходе первого элемента 20 НЕ сигнал равен О, что препятствует прохождению импульсов с входа 8 на счетный С-вход первого регистра 12 при спуске элеватора, когда на входе Сдвиг влево есть 1. Одновременно открывается первый элемент 23 И и в работу вступает второй регистр 13, который совместно с индикатором 16 фиксируют положение элеватора 5 в зоне Д h (фиг. 1).
Здесь делитель 28 частоты введен из следующих соображений. С точки зрения точности определения положения элеватора 5 наиболее жесткие требования предъявляются к зонам Д И, , где визуальный контроль за рабочим механизмом буровой установки затруднен, Поэтому для этих зон разрядность регистров 12 и 14 должно быть наибольшей. .
Дискретность для зоны Д 2 может быть существенно повышена, так как данная зона является визуально достаточно хорошо контролируемой и с точки зрения возникно- 5 вения каких-либо аварийных ситуаций сравнительно безопасной. Одновременно с этим увеличение дискретности (снижение разрядности) индикации позволяет снизить ап- паратурные затраты при реализации
10 индикатора и повысить надежность его работы.
Таким образом, на С-вход второго сдвигового регистра 13 поступает сигнал пониженной частоты до тех пор, пока его
15 старший разряд не переключится в 1. Первый элемент23 И закрывается, а следующий импульс с выхода 8 подается через третий элемент 25 И на счетный С-вход третьего регистра 14 , На индикаторе 17 (фиг.1 и 2)
0 фиксируется вход элеватора 5 в зону Д И, В момент времени записи 1 в старшем разряде третьего регистра 14 поступает команда на вход блока 1 (фиг.1), что влечет за собой торможение электродвигателя 2.
5 Дается команда на перемещение элеватора 5 вниз (1 на третьем выходе 10 датчика 6 и О на выходе 9, фиг.2). Первый элемент 23 И закрывается, а третий регистр 14 последовательно переходите нулевоесо0 стояние. Светодиоды индикатора выключаются. Затем открывается второй элемент 24 И импульсы с выхода 8 поступают на вход делителя 28 частоты. Происходит обнуление второго региста 13. Как только его первый
5 разряд переключается в О, через время задержки закрывается второй элемент 24 И и переходит в открытое состояние четвертый элемент 26 И. Запись О в n-ом разряде индикатора 12 (фиг.9а,д) свидетельствует о
0 входе элеватора 5 в зону Д з. Прохождение этой зоны рабочим механизмом сопровождается последовательным выключением светодиодом индикатора 15 (фиг.9б,д).
Таким образом, устройство позволяет
5 осуществлять автоматический контроль за положением элеватора, что особенно важно в зонах ДИ и Д 1з, где визуальный контроль за перемещением элеватора затруднен. Формула изобретения
0 Устройство определения положения элеватора, содержащее датчик скорости вращения лебедки, ключ и первый индикатор, отличающееся тем. что, с целью повышения точности, устройство снабжено
5 тремя сдвиговыми регистрами, вторым и третьим индикаторами, тремя элементами НЕ, четырьмя элементами И. элементом ИЛИ, делителем частоты и четырьмя элементами задержки при тгом первый выход
датчика скорости вращения лебедки соединен с первыми входами четырех элементов И, выходы каждого сдвигового регистра соединены с соответствующими входами каждого индикатора, причем последний выход первого сдвигового регистра через первый элемент задержки соединен с вторым входом первого элемента И, выход которого подключен к первому входу элемента ИЛИ, первый выход второго сдвигового регистра через второй элемент задержки соединен с вторым входом второго элемента И и через первый элемент НЕ - со вторым входом четвертого элемента И, выход которого подключен к счетному входу первого сдвигово- го регистра, последний выход второго сдвигового регистра через третий элемент задержки соединен через второй элемент НЕ с третьим входом первого элемента И и непосредственно с вторым входом третьего
9W
элемента И, выход которого подключен к счетному входу третьего сдвигового регистра, первый выход третьего сдвигового регистра через четвертый элемент задержки и третий элемент НЕ соединен с третьим входом второго элемента И, выход которого подключен к второму входу элемента ИЛИ, выход элемента ИЛИ через делитель частоты соединен со счетным входом второго сдвигового регистра, при этом второй выход датчика скорости вращения кабеля соединен с входом Сдвиг вправо каждого сдвигового регистра и с четвертым входом первого элемента И, третий выход датчика скорости вращения лебедки соединен с входом Сдвиг влево каждого сдвигового регистра и с четвертым входом второго элемента И, а выход ключа соединен с входами Сброс первого, второго и третьего сдвиговых регистров.
стоп
) mm
J4
35;J6
37
38
34
Ух ft)
фиг. 5
9и.Т
а
о
0/
о
в
QI
| Устройство для автоматизированного управления перемещением элеватора | 1984 |
|
SU1234599A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Бражников В.А., Кузнецов В.А | |||
| Информационные устройства для определения эф- фективности управления процессом бурения | |||
| М.: Недра, 1978, с.73. | |||
