Изобрета;п е ОТНОСР ТСЯ к буровой технике и предназначено для бурэнкя разведочных и экся.пуэ таш1сн;ных скважин на нефть и газ,
Целью изобретения является иозшис- ние надежности работы устройств..
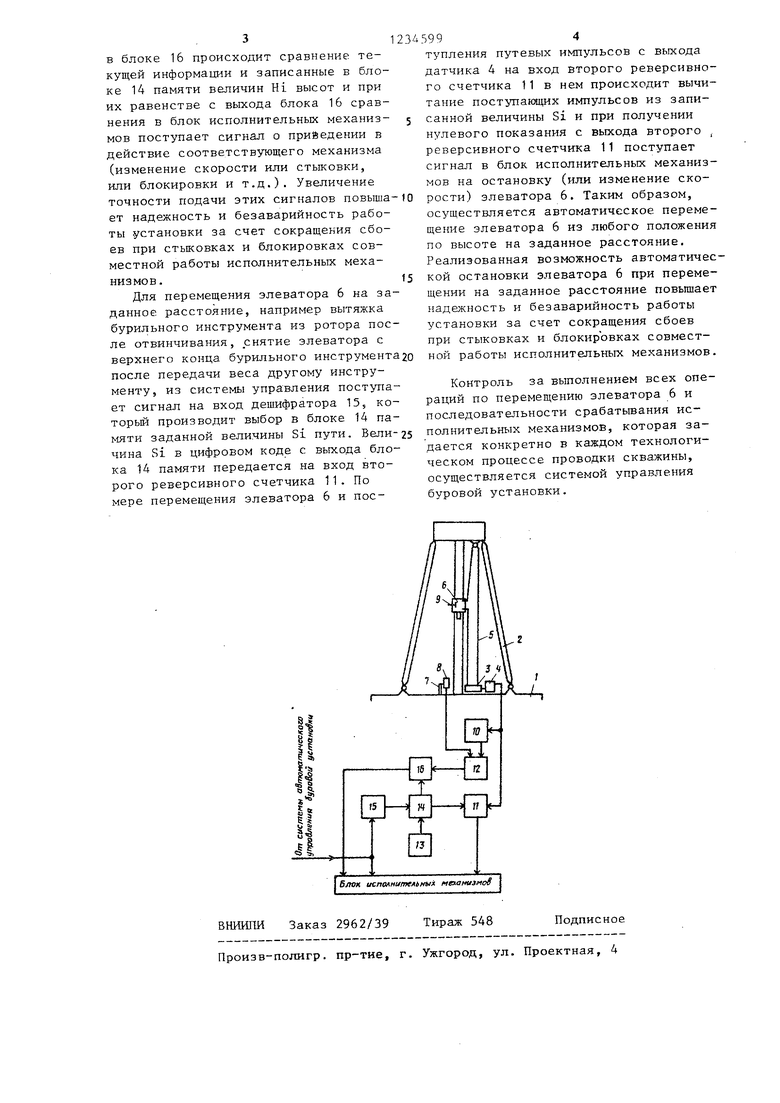
На чертеже язображсиа струкгур1 ая схема устройства ,1;ля антома.тизировг} - кого ynpasJieLiHH зеоемеп еиием элеватора взаимос ья:з ; э;те;.,ми буровой
установки - I
Устройе Ео BKjfiouaeT основание 1 ., на котором ус.таиовлена вьшша 2. веду 1ЦИЙ барабан 3„ на валу которого на- ходится патчкк : путеяых И1м:пульс;Оз. Ведупртй navjafiaii ; т;ро,,Г Г.твом трогч;- БОЙ систем: ;: сл};з;т : злеглатором 6.
Ка жестком кроизи А ейне 7,, тгоикреп-- JieHHOMj нагтример, к ослюванию i ,, ус;-- тановлен датчик 8 кот1трольт}ого положения элеватора 6 , На злеватсре. б для пзаикодействкя с л атчнком ко-: ролтлног о ло;х.) ;1лпватора :ч():;ет быть уста.нозлен, uaiTpiiMep, ) 9(взаимодейстТ)И-; зленатора 6 с датчиком контрол ьиог о го: о;кенид ;и-;:е-вато- ра 8 может чроисчолаг -: -i механическим пуч е-
Датчик -4 чу-гезых ичиульс зк выходо связан со . xoIlo i 10 определения направления чеое ещекиь ч a SpBi-i;.- входом ) регзг -осчБиоу с:- сгчетч -.- ка 1 1 5 выход кстор -)ч; (вкза.к с CijjcKO исполнительных меха-и) Вь5ход да г чика 8 конгр злънег -; г. лшженля элека - тора соединен со -RJ ODJ.M :нхс1;ом первиго реверсизнзгс ::чс- чика ;2, первые; вход которот о соединен с выходо -; 6j,:oка 10 определемггл .(апра.зления п(5рег.че щения. Зыход блока 13 ввода информации соеди1 ен с первьтм входом блока 14 памяти, вт)-рой нход которого С1:)еди-- неи с выходо г ж игуфта-гора :5- 1:е)пь: ; выход блока i . v-j соединен t: вым входом б.лок;; б ::-| авнечия, зч-орой выход блока i ггамя: :;- соегшт-те;: со :: рым входом в :.-орого ттеверсивного :;-;;ет чика 11„ з-горой вход блока 16 сравнения соеднне.н с з;)Кодом перЕог о ровереивнсч о счетг: ика 12, а выход блока
сравнения 16 соединен с блоком j cr;c;j
ни-тельных механиз:мов При этом ( ястема управления: буровой установки свя-- зана со входом деишфратора 15 и с
блоком нелолнителbHbix, механизмов .
Б качестве датчр Ка 8 контрольно тз г.оложен1-1Я может быт использован, на- 1.;ре,д 1:ача,чсм работы оператором 4(iMOiipi (),т;ока 15 ввода и} формадии ; бло;-; 1ч памяти взодит.:я в цифровом коле ряд } еличн 1 Я: заданноге пути (, 1к:ги:ме цеьия 1 -элеватора б, а -г акже е.ид леличл-; ; 1е.. зада ;;1;1х (;т от ос- м{ 1занг:я э :ева :л)ра 6.
Гри ,;5ер 1чткат|ьнь ;-; )::ере1 ошениях зленатора 6 обе ветви, тросовой систе Ь нере1чсмда зтся к зра цают барабан 3 пал :оторс;го состыкован :: залом дат- ;:. ч ; утев:)1Х импулт,;::с.е,, серия р r t :U:ix ;;;Mnyjn;Ce с г:о-; орого че-- . . .к iP ;);:;Л;.:I.e.: ен-;т, )а;траи,1;еч1 я | сре -;;сик;ния гг.;с уг1ает са зхсдд перво- : ;:и: liMOi i/ с-.:тчи1ча 12 и склады- :;/.стс51 д ;; ;;;;- :л1зае -ся ) (epi; дзижокии те.а-:ч;ра icup;:-:) v j:;,j pbiqjrraio j ca Гнри
ii .О j Г : ;:гь;1,имс:де;( оьгчаг-а 9 :. . - - -гком -; - .( да пд I -injca Я на Ч(чпьи ре ;ерс;и):ЛЬ1Й сче::чхк 12 лосту- нзет ,: Г;;ач короектцп, котор1)1Й i-a
;:-.C::u.: j .;.;р i.pjro режд/стилгогс ечетчика 1 О- iTJH- И5;(1с-)рмй;д1ю ;а соо ПЭ ТгстБующую
: и с -)-и тем: ;;,; о:-. ;. положению зл еватсз- ; i Ь (и частном cjiy-чае -- ,-леяое) Л5
i /oiU:C(-e ,.нейп1их Г)еремешен й c ;ieT ;iiyiij::CO3 лерзпм ре)зет-)си-:чллм счетчи- см : - рололнаетс от скорректиро- :c-;nic :; зеличтпн; Таким образс;ь; па вы- .. и;-; червох с;; -ос Нерсизкегг- 1::че-гчика 12 1 ocejy гек- чдук Ю формаДРПО н цифровом кспе о ло.-тожб::;1- и -э..езатора о.
В HiJOpecce сиус1чОГ едТ)Смпьп; опера- , iiajjauiH.BaHiifi и T.,I;: при ка/гщом (;с C juvBa i opa б 1 роис;хо;:и г автома- ;; :ес:к;ля .чоррекдия информании о его
.; ;i(;x;;,-i ,ИЗ . iCH ЗС: SiT eJ b::i,(J ОСНОЗ НИЯ и
;i клй ч;:-. TCH наканлр вание О1и;1бки от JC.-j i; ;i ti И;-; сист-р т ;:, износа с- I ля :. г-ел -|Х .деталей ; i )ялле1 -1Я люф(-1 V. ; л д Откорректчровангга; инфор- .. в н1 1ф 5Озом код г (.) положении -CiC- a-i cipa 6 f вых:)да нервого ревереиЕ iii-ro 2 поступае нг. один ход блоке - 6 сфав- ечия, на лругой HxO .i, KOTC pi.iro Hoci-упают из блока 14 камят:; величины Hi (в нифрс;вом коде) iifc:coT (г ;озз:) злезётора 6,, з кото рь:х необходкм ; какие-либо воздействия ,пнител Ы(ые ь;еханизмы буровой установки. При двил;е н-(и злеватора 6
3
в блоке 16 происходит сравнение текущей информации и записанные в блоке 14 памяти величин Hi высот и при их равенстве с выхода блока 16 сравнения в блок исполнительных механиз- мов поступает сигнал о приведении в действие соответствующего механизма (изменение скорости или стыковки, или блокировки и т.д.). Увеличение точности подачи этих сигналов повышает надежность и безаварийность работы установки за счет сокращения сбоев при стыковках и блокировках совместной работы исполнительных механизмов.
Для перемещения элеватора 6 на заданное расстояние, например вытяжка бурильного инструмента из ротора после отвинчивания, снятие элеватора с верхнего конца бурильного инструмента после передачи веса другому инструменту, из системы управления поступает сигнал на вход дешифратора 15, ко- торьй производит выбор в блоке 14 памяти заданной величины Si пути. Величина Si в цифровом коде с выхода блока 14 памяти передается на вход второго реверсивного счетчика 11. По мере перемещения элеватора 6 и пос5994
тупления путевых импульсов с выхода датчика 4 на вход второго реверсивного счетчика 11 в нем происходит вычитание поступающих импульсов из записанной величины Si и при получении нулевого показания с выхода второго , реверсивного счетчика 11 поступает сигнал в блок исполнительных механизмов на остановку (или изменение скорости) элеватора 6. Таким образом, осуществляется автоматическое перемещение элеватора 6 из любого положения по высоте на заданное расстояние. Реализованная возможность автоматической остановки элеватора 6 при перемещении на заданное расстояние повышает надежность и безаварийность работы установки за счет сокращения сбоев при стыковках и блокировках совместной работы исполнительных механизмов.
Контроль за выполнением всех операций по перемещению элеватора 6 и последовательности срабатьгоания исполнительных механизмов, которая задается конкретно в каждом технологическом процессе проводки скважины, осуществляется системой управления буровой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи и приема информации на транспортном средстве | 1988 |
|
SU1623905A1 |
| Способ регистрации спирограмм и устройство для его осуществления | 1986 |
|
SU1537211A1 |
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Устройство для отображения информации | 1983 |
|
SU1246128A1 |
| Устройство для ввода и вывода информации | 1986 |
|
SU1392552A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1983 |
|
SU1092222A1 |
| Обучающее устройство | 1986 |
|
SU1381574A1 |
| Устройство для контроля микропроцессорной системы | 1985 |
|
SU1392562A1 |
| Автоматизированная буровая установка | 1983 |
|
SU1087655A1 |
| Автоматическая система контроля работы инкубаторов | 1985 |
|
SU1331462A1 |

| Котляров A.M | |||
| Автоматизация буровых агрегатов | |||
| М.: Недра, 1971, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Автоматизированная буровая установка | 1983 |
|
SU1087655A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
