со
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой анализатор содержания углерода в жидкой стали | 1984 |
|
SU1359785A1 |
| Устройство для передачи и приема информации | 1989 |
|
SU1656572A1 |
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Программное устройство для поддержания постоянства скорости резания | 1984 |
|
SU1211696A1 |
| Устройство для вычисления содержания углерода в жидкой стали | 1985 |
|
SU1262525A1 |
| Устройство для контроля экспоненциальных процессов | 1986 |
|
SU1310781A1 |
| Устройство для вычисления скорости изменения параметра | 1984 |
|
SU1275473A1 |
| Устройство для контроля экспоненциальных процессов | 1990 |
|
SU1732331A1 |
| Генератор циклов | 1981 |
|
SU995289A1 |
| Устройство для цифровой обработки аналогового сигнала | 1986 |
|
SU1332335A1 |
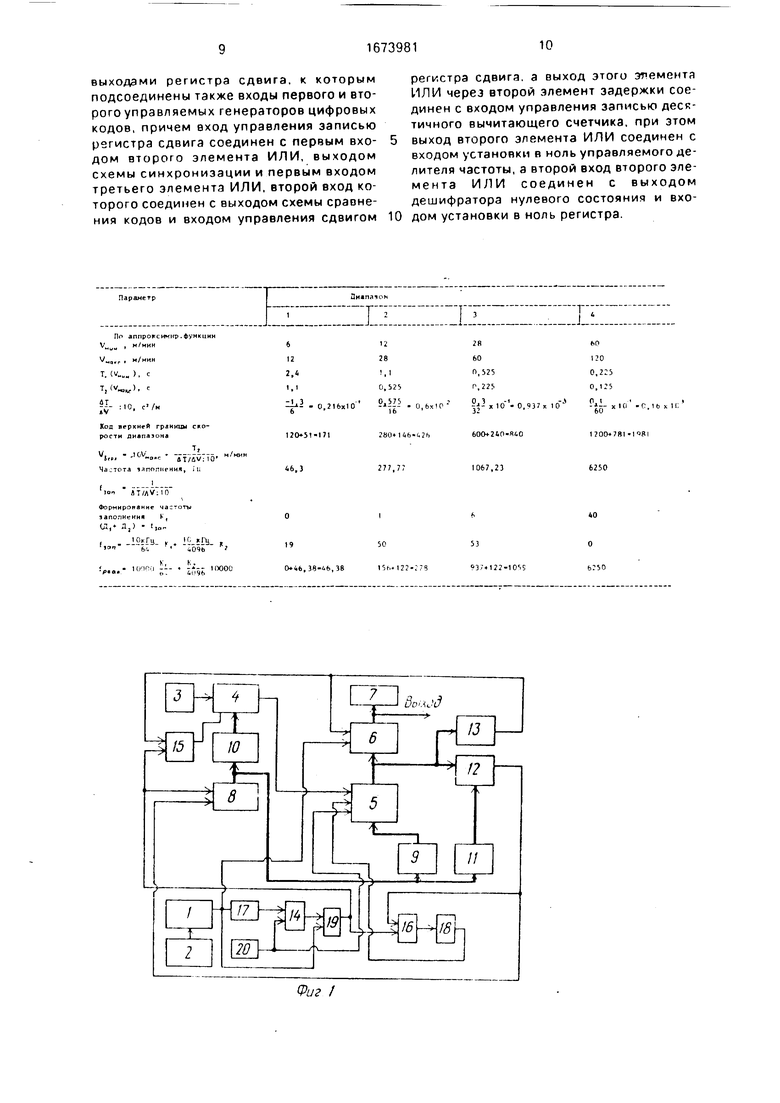
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления технологическими установками для контроля скорости перемещения рабочих органов. Цель изобретения - упрощение устройства и повышение его быстродействия. Сущность изобретения состоит в том, что диапазон измеряемых частот разбит на участки, в пределах которых для определенной частоты генератора обеспечивается заданная точность, а в качестве генератора используется генератор импульсов 3 и управляемый делитель частоты 4, в котором в зависимости от измеряемой скорости частота устанавливается автоматически в течение одного - двух периодов импульсов от датчика перемещения 1, что повышает быстродействие устройства. Использование управляемых генераторов 9, 10, 11 цифровых кодов, регистра сдвига 8, схемы 12 сравнения кодов, дешифратора 13 нулевого состояния позволяют существенно упростить схему устройства. 4 ил.
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления технологическими установками для контроля скорости перемещения рабочих органов.
Цель изобретения - /прощение устройства и повышение его быстродействия.
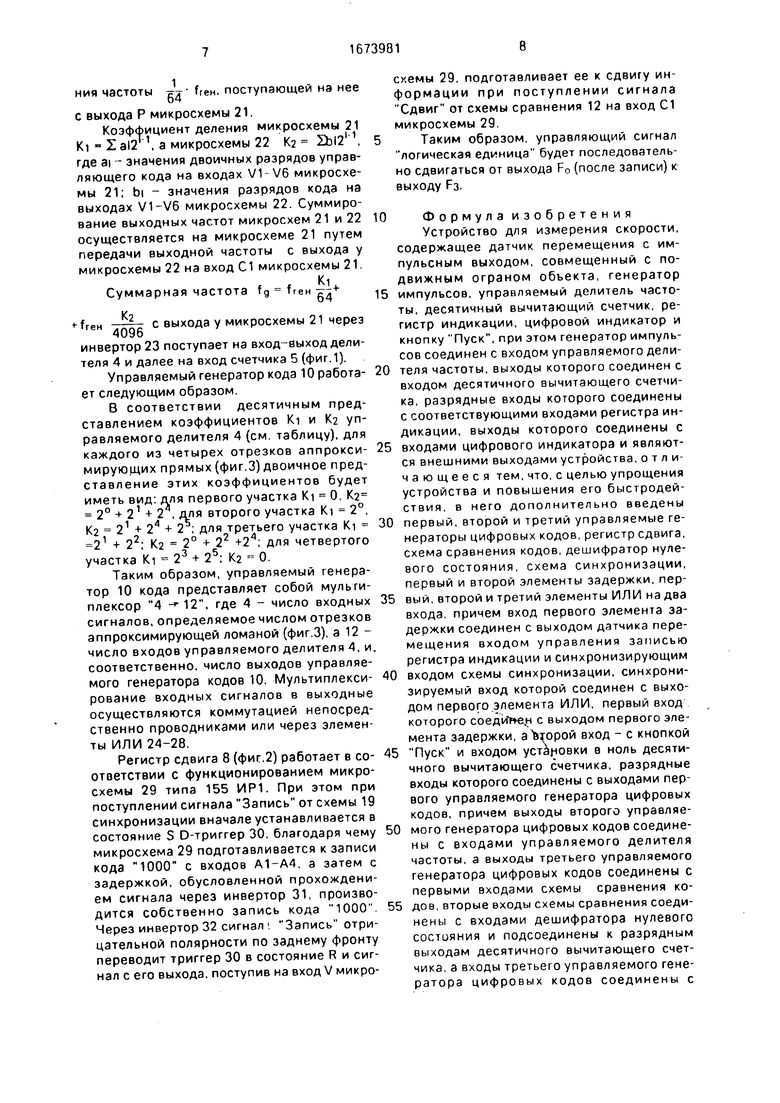
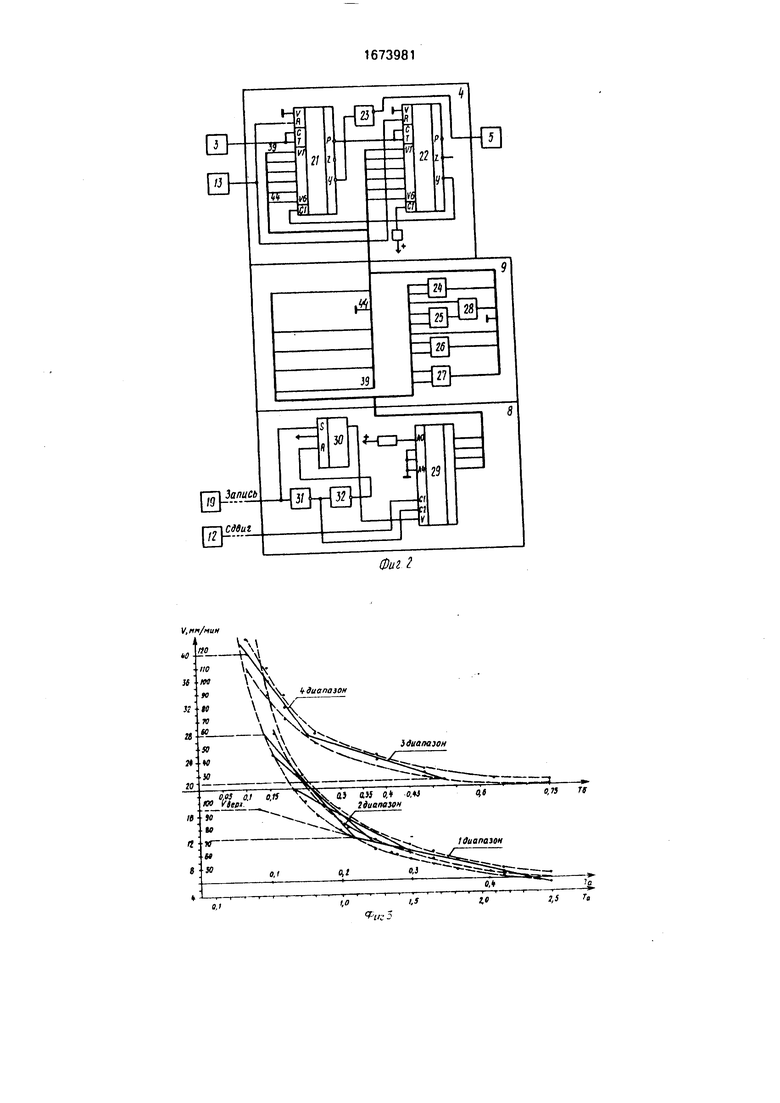
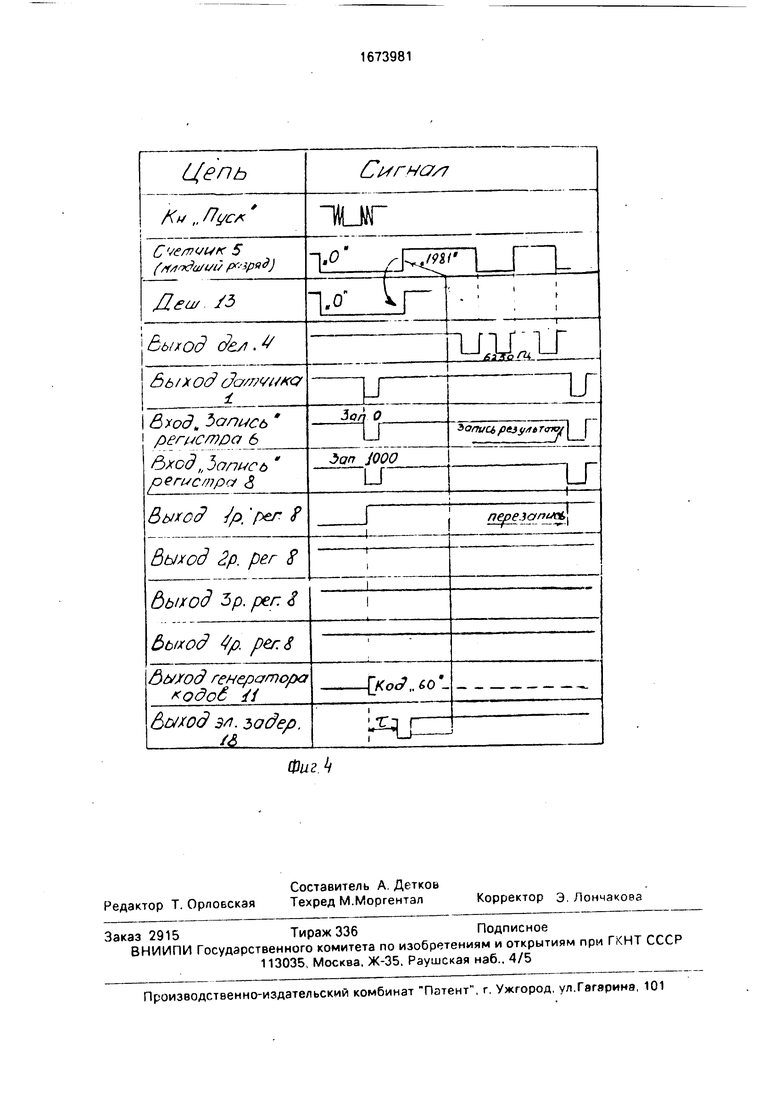
На фиг.1 изображена структурная схема устройства: на фиг.Г - принципиальные схемы управляемого делителя, управляемого генератора кода и регистра сдвига; на фиг.З - зависимость скорости перемещения подвижного органа от периода следования импульсов с выхода датчика; на фиг.4 - временная диаграмма работы устройства в старшем диапазоне.
Устройство (фиг.1) содержит датчик перемещения 1 с импульсным выходом, со- пр««женный с подвижным органом 2,
скорость перемещения которого измеряет ся. В устройство также входят генератор импульсов 3, управляемый делитель 4 частоты следования импульсов, десятичный вычитающий счетчик 5, регистр индикации 6, цифровой индикатор 7, регистр сдвига 8, первый 9, второй 10 и третий 11 управляемые генераторы цифровых кодов, схема 12 сравнения кодов, дешифратор 13 нулевого состояния, первый 14, второй 15 и третий 16 элементы ИЛИ на два охи- до первый 17 и второй 18 элементы задержки, схема синхронизации 19 и кнопка Пуск 20.
VnpaenfleMb делитель 4 (фиг .2) состоит из двух микросхем 21, 22 типа К155 И С С и инвертора 23, например, типа К 155 ЛН1.
Управляемый генератор кода 9 (для реализации начальных условий в соответстOs
VI
00 О 00
вии с фиг.З) состоит из группы элементов ИЛИ 24-28 и коммутирующих цепей.
Регистр сдвига 8 состоит из микросхемы 29 типа 155 ИР2, D-триггера 30, например, типа 155 МТ1 и двух инверторов 31 и 32, например, типа 155 ЛН1.
Устройство работает следующим образом.
Разрешающая способность датчика 1, а также разрядность регистра 8, значения кодов генераторов кодов 9, 10, 11 и частота следования импульсов с выхода генератора 3 определяются предназначением устройства. Предположим, устройство применяют для измерения скорости перемещения пуансона пресса в диапазоне 6-120 мм/мин с точностью ±10%. В качестве датчика 1 при этом можно использовать, например, датчик типа ДДР-10 с 256 отсчетами на один оборот вала.
При механическом сопряжении датчика 1 с пуансоном, например, с помощью ролика диаметром 60,6 мм и повышающего редуктора с коэффициентом редукции три разрешающая способность датчика 1 составляет
тг-d
датч
Кред Пдатч
0,25 мм
На фиг.З представлена зависимость скорости перемещения подвижного органа 2 от периода следования импульсов с выхода датчика 1.
Для удобства гиперболическая функция представлена на двух участках масштабирования: в диапазоне скоростей 6-28 мм/мин, ось периода Та, а в диапазоне 28±120 мм/мин - ост Тб
Гиперболическая функция представлена в виде трубки допудстимой погрешности (10%). В пределах этой трубки произведена кусочно-линейная аппроксимация, позволяющая заменить гиперболическую функцию кусочно-линейной.
На фиг.З видно, что требуемую точность обеспечивают четыре отрезка линейной функции с точками перегиба, соответствующими скоростям перемещения подвижного органа: 12, 28 и 60 мм/мин. В таблице приведены результаты обработки графика функции по фиг.З. В таблице:
V/мин минимальная скорость диапазона,
VMBKC максимальная скорость диапазона,
Ti - период (с) следования импульсов датчика, соответствующий VMHH;
Т2 - период, соответствующий Умэкс.
-|1-: 10- |V T2-;1 МОхарактеА V| Х/макс - VMHH I
ризует крутизну участка линейной аппроксимации, деление на десять уменьшает
ошибку округления при аппаратной реализации.
Расчетная величина начальной скорости диапазона используется в качестве начального значения, по которому путем
вычитания текущего значения скорости, определяемого периодом следования импульсов датчика 1, определяется истинная скорость. Графически (фиг.З) VBepx представляет собой условную точку на продолжении участка аппроксимации. В формуле для Veepx 2Т2 - временной интервал, соответствующий старшим диапазонам (фиг.З), т.е. если, например, рассчитывается значение VDepx для первого диапазона,
то необходимо учесть время, соответствующее Т2 второго, третьего и четвертого диапазонов. Для четвертого диапазона
25
,
,1
f зак - расчетная частота следования импульсов, поступающих на счетный вход счетчика 5 при замере периода, в диапазоне
30,,1
f:
AT/AV:10
, Гц:
KI, K2 - коэффициеты умножения каскадов управляемого делителя 4 (фит.2):
f3aH - реальная частота следования импульсов на выходе делителя 4 с учетом Ki и К2.
После включения устройства нажимается кнопка Пуск 20 (фиг.1). Сигнал с
выхода кнопки устанавливает в нулевое состояние десятичный счетчик 5. Дешифратор 13 нулевого состояния счетчика 5 при этом вырабатывет сигнал, который через элемент ИЛИ 15 устанавливает в нулевое состояние управляемый делитель частоты 4 и, поступив на вход установки в ноль регистра индикации 6, также устанавливает его в нулевое состояние, вследствие чего на индикаторе 7 будет
индицироваться нулевое значение скорости. Сигнал с кнопки 20 через элемент ИЛИ 14 поступает также на синхронизируемый вход схемы синхронизации 19, но так как подвижный орган 2 находится в
покое, то с выхода датчика 1 сигналы на синхронизирующий вход схемы 19 не поступают и на ее выходе сигнала нет. При движении органа 2 вследствие его механической связи с датчиком перемещения 1
датчик начинает вырабатывать импульсы, частота следования которых определяет скорость перемещения органа 2, а их число - величину пройденного пути. После начала движения органа 2 первый импульс с выхода датчика 1 поступает на вход управления записью регистра индикации б, но не меняет его состояния, так как счетчик 5 находится в нулевом состоянии, одновременно импульс с выхода датчика 1 поступает на синхронизирующий вход схемы синхронизации 19, и сигнал с ее выхода через элемент ИЛИ 15 поступает на R-вход управляемого делителя 4, не изменяя его начального состояния, импульс с выхода схемы синхронизации 19 воздействует также на вход Запись регистра сдвига 8, и на его выходе устанавливается код 1000, соответствующий управлению работой устройства в четвертом диапазоне (фиг.З). Импульс с выхода датчика через элемент задержки 17 и элемент ИЛИ 14 поступает также на синхронизируемый вход схемы синхронизации 19. автоматически подготавливая устройство к работе в следующем цикле измерения скорости при поступлении каждого последующего импульса с выхода датчика 1. После установки на выходе регистра 8 начального кода 1000 управляемые генераторы кодов вы рабатывают соответственно: генератор кодов 10 двоичный код 00000 010011, соответствующий значению Ki 0, «2 19 по таблице;
генератор кодов 9 - двоично-десятичный код 0001 1001 1000 0001, соответствующий значению Voepx 1981 по таблице;
- генератор кодов 11 - двоично-десятичный код 0110 0000, соответствующий VMMH 60 четвертого диапазона по таблице.
После установки кодов на выходах генераторов кодов 9, 10, 11 импульс с выхода схемы синхронизации 19 через элемент ИЛИ 16, задержанный элементом 18, воздействует на вход Запись счетчика 5 вследствие чего код генератора 9 записывается в счетчик 5, на выходе дешифратора 13 сигнал нулевого состояния исчезает, управляемый делитель 4 начинает вырабатывать импульсы с частотой следования f 6250 Гц (фиг 4), счетчик 5 начиняет работать на вычитание Если скорость перемещения органа 2 находится в пределах старшего диапазона, то второй импульс с выхода датчика 1 будет выработан раньше, чем сигнал сравнения схемы 12, фиксирующей границу диапазона При этом импульс с выхода датчика 1, поступив на вход Запись регистра индикации 6, пе-
репишет код измеренной скорости в регистр индикации 6 из счетчика 5, на индикаторе 7 будет отображено значение скорости, код которой также поступает на
5 выход устройства для использования, например, в автоматизированных системах управления. Пусть, например, скорость органа 2 составляет 80 мм/мин. После записи в счетчик 5 значения VBepx 1981 на вычи10 тающий вход счетчика 5 поступит за период измерения Т 0,187 с (фиг.З) число
импульсов m д 7/vT7-Tn 810, на индикатор при этом выводится значение трех
15 старших разрядов (компенсация деления на 10), т.о. на индикаторе V 81 мм/мин (погрешность 1,25%).
Рассмотрим случай, когда измеряемая скорость принадлежит младшему первому
20 диапазону, например V 7 мм/мин. В этом случае после выработки датчиком 1 импульса, первого после нажатия кнопки Пуск 20, и пуска цикла вычитания из сче гчика 5 импульса с частотой f 6250 Гц
25 при достижении счетчиком 5 кода скорости, соответствующего границе четвертого диапазона (V 60 мм/мин, см. таблицу), срабатывает схема 12 сравнения. Импульсный сигнал с ее выхода поступает на вход 30 регистра 8 и сдвигает ный код 1000 вправо (Фиг.2), астедст- вие чего на выходе регистра 4 устанавливается кед 0)00, соответстэу- ющий управлению работой устройства в
35 третьем диапазоне (фиг.З). В результате управляемый делитель 4 вырабатывает последовательности импульсов с частотой следования f 105G Гц, соответствующей третьему диапазону.
40Выходной сигнал с выхода схемы сравнения через элемент ИЛИ 16 и элемент задержки 18 поступает на вход управления записью счетчика Ъ, в который записип; т- ся --од Veepx третьего диапазона.
45Если измеряемая скорость ниже грь,.чцы первого диапазона, то счетчик 5 доходит при вычитании до состояния О, дешифратор 13 нулевого состояния сигналом с выхода устанавливает в нулевое состояние
50 регистр индикации 6, а делите/г. 4 устанаг- лиьзегсд а нулевое состояние череэ элемент И 15 на индикаторе 7 будет индииировагьсг нулев -э значение скорости.
Управляемый долитель частоты 4 (фш 2;
55 рнботает в соответствии с функц онирова нием микросхем 1Ь5 ИЕ8, на которых он собрав. При этом микросхема 21 образует каскад деления выходной частоты frPH генератора 3, а микросхема 22 - каскад деления частоты -f freM. поступающей на нее
Ь4
с выхода Р микросхемы 21,
Коэффициент деления микросхемы 21 Ki 2а12 . а микросхемы 22 К2 2Ы2И, где ai - значения двоичных разрядов управляющего кода на входах V1-V6 микросхемы 21; bi - значения разрядов кода на выходах V1-V6 микросхемы 22. Суммирование выходных частот микросхем 21 и 22 осуществляется на микросхеме 21 путем передачи выходной частоты с выхода у микросхемы 22 на вход С1 микросхемы 21.
Суммарная частота fg freH
64
f
К2
с выхода у микросхемы 21 через
4096
инвертор 23 поступает на вход-выход делителя 4 и далее на вход счетчика 5 (фиг.1).
Управляемый генератор кода 10 работает следующим образом.
В соответствии десятичным представлением коэффициентов Ki и Ка управляемого делителя 4 (см. таблицу), для каждого из четырех отрезков аппроксимирующих прямых (фиг.3) двоичное представление этих коэффициентов будет иметь вид: для первого участка Ki О, К2 2° + 21 + 2 . для второго участка Ki 2°, Кз 21 + 24 + для третьего участка Ki 21 + 22; Кг 2° + 22 +24; для четвертого участка Ki 23 + 25; К2 - 0.
Таким образом, управляемый генератор 10 кода представляет собой мультиплексор 4 12, где 4 - число входных сигналов, определяемое числом отрезков аппроксимирующей ломаной (фиг.З), а 12 - число входов управляемого делителя 4, и. соответственно, число выходов управляемого генератора кодов 10. Мультиплексирование входных сигналов в выходные осуществляются коммутацией непосредственно проводниками или через элементы ИЛИ 24-28.
Регистр сдвига 8 (фиг.2) работает в соответствии с функционированием микросхемы 29 типа 155 ИР1. При этом при поступлении сигнала Запись от схемы 19 синхронизации вначале устанавливается в состояние S D-триггер 30. благодаря чему микросхема 29 подготавливается к записи кода 1000 с входов А1-А4. а затем с задержкой, обусловленной прохождением сигнала через инвертор 31, производится собственно запись кода 1000 Через инвертор 32 сигнал Запись отрицательной полярности по заднему фронту переводит триггер 30 в состояние R и сигнал с его выхода, поступив на вход V микросхемы 29, подготавливает ее к сдвигу информации при поступлении сигнала Сдвиг от схемы сравнения 12 на вход С1 микросхемы 29.
Таким образом, управляющий сигнал
логическая единица будет последовательно сдвигаться от выхода F0 (после записи) к выходу РЗ.
Формула изобретения
Устройство для измерения скорости, содержащее датчик перемещения с импульсным выходом, совмещенный с подвижным ограном объекта, генератор
импульсов, управляемый делитель частоты, десятичный вычитающий счетчик, регистр индикации, цифровой индикатор и кнопку Пуск, при этом генератор импульсов соединен с входом управляемого делителя частоты, выходы которого соединен с входом десятичного вычитающего счетчика, разрядные входы которого соединены с соответствующими входами регистра индикации, выходы которого соединены с
входами цифрового индикатора и являются внешними выходами устройства, отличающееся тем, что, с целью упрощения устройства и повышения его быстродействия, в него дополнительно введены
первый, второй и третий управляемые генераторы цифровых кодов, регистр сдвига, схема сравнения кодов, дешифратор нулевого состояния, схема синхронизации, первый и второй элементы задержки, первый, второй и третий элементы ИЛИ на два входа, причем вход первого элемента задержки соединен с выходом датчика перемещения входом управления записью регистра индикации и синхронизирующим
входом схемы синхронизации, синхронизируемый вход которой соединен с выходом первого элемента ИЛИ, первый вход которого соедй не.н с выходом первого элемента задержки, а второй вход - с кнопкой
Пуск и входом установки в ноль десятичного вычитающего счетчика, разрядные входы которого соединены с выходами первого управляемого генератора цифровых кодов, причем выходы второго управляемого генератора цифровых кодов соедине- ны с входами управляемого делителя частоты, а выходы третьего управляемого генератора цифровых кодов соединены с первыми входами схемы сравнения кодов, вторые входы схемы сравнения соединены с входами дешифратора нулевого состояния и подсоединены к разрядным выходам десятичного вычитающего счетчика, а входы третьего управляемого генератора цифровых кодов соединены с
выходами регистра сдвига, к которым подсоединены также входы первого и второго управляемых генераторов цифровых кодов, причем вход управления записью регистра сдвига соединен с первым входом второго элемента ИЛИ, выходом схемы синхронизации и первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом схемы сравнения кодов и входом управления сдвигом
4TMV.IO
Формирорамие частоты заполнения Ь, (Д, Д; - «,0п
регистра сдвига, а выход этого элемента ИЛИ через второй элемент задержки соединен с входом управления записью десятичного вычитающего счетчика, при этом
выход второго элемента ИЛИ соединен с входом установки в ноль управляемого делителя частоты, а второй вход второго элемента ИЛИ соединен с выходом дешифратора нулевого состояния и входом установки в ноль регистра.
40
о,
2, i
| Цифровой измеритель скорости | 1986 |
|
SU1411680A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
