Изобретение относится к электротехнике, в частности, «устройствам преобразования циклического поступательного движения ведущего звена во вращательное движение ведомого звена, и может быть использовано для управляемого привода звеньев, например, в станках с числовым программным управлением.
Цель изобретения - повышение надежности и технологичности.
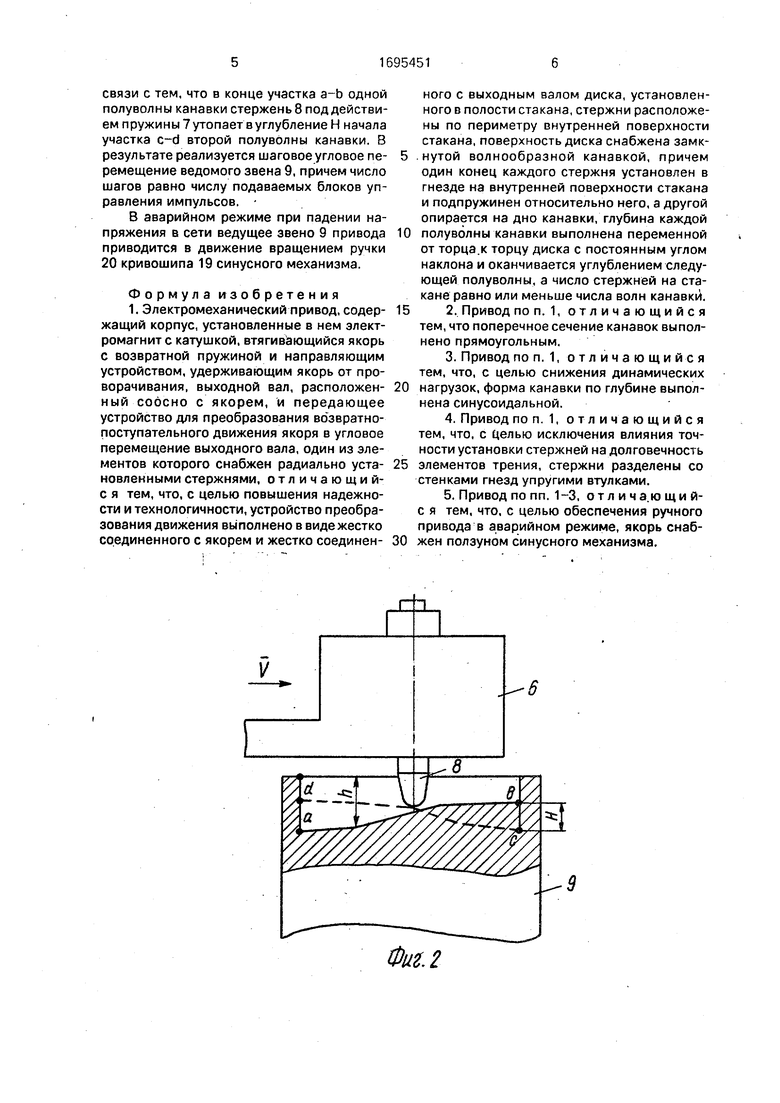
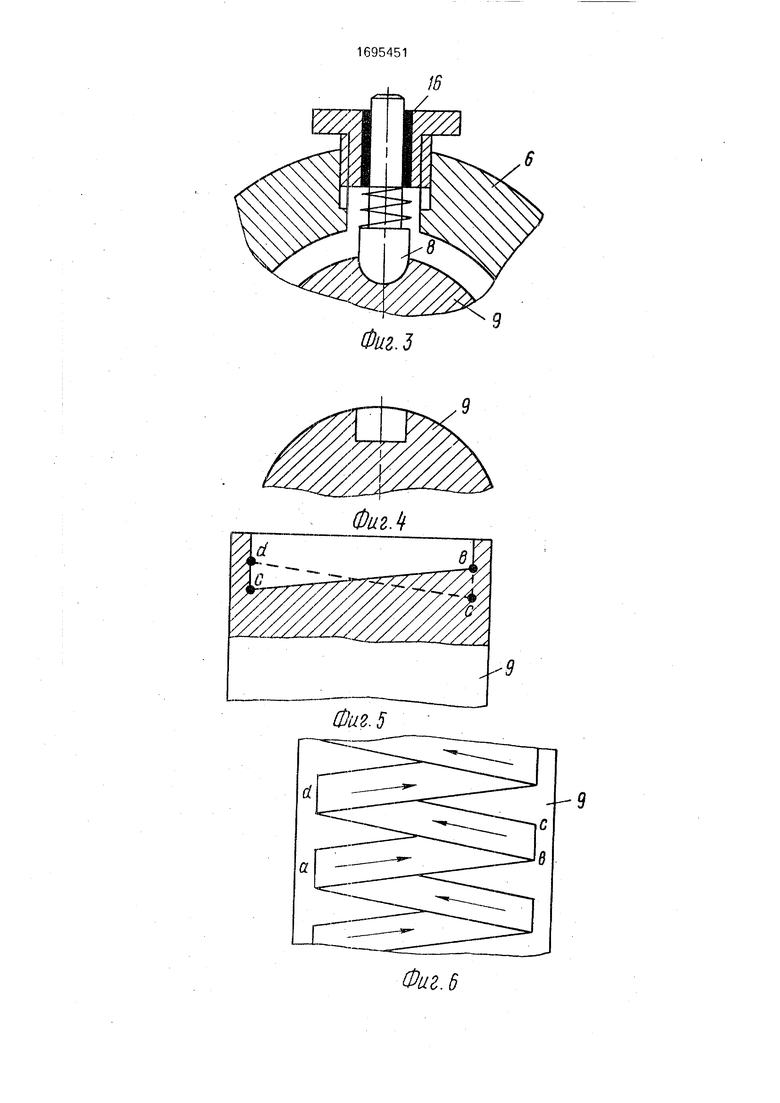
На фиг. 1 приведен электромеханический привод, общий вид; на фиг. 2 - стержень, установленный одним концом в гнезде стакана и опертый другим на дно канавки; на фиг. 3 и 4 - формы поперечных сечений канавок; на фиг. 5 и 6 - прямолинейные формы дна и половинок волн канавок на фиг. 7 - размещение стержней на плоских пружинах над пазами в стенке с внутренней стороны; на фиг, 8 - размещение стержней на плоских пружинах над пазами с наружной стороны.
Электромеханический привод (фиг. 1) содержит корпус 1, установленные в нем блок питания (БП) и устройство программного управления (УПУ) 2, электропривод и механизм преобразования движения ведущего звена в движение ведомого звена. Электропривод выполнен в виде электромагнита 3 с втягивающимся подпружиненным пружиной 4 сердечником 5, являющимся ведущим звеном привода. На конце сердечника 5 размещен пустотелый стакан 6 несущий на себе равномерно расположенные по периметру с возможностью радиального перемещения подпружиненные пружинами 7 стержни 8 со сферическими наконечниками, взаимодействующие с поверхностью замкнутой волнистой канавки a-b-c-d, нарезанной по периферии цилиндрической поверхности ведомого звена 9, которое установлено на опоре 10 в корпусе 1 с возможностью вращения в полости стакана 6. Глубина h канавки a-b-c-d (фиг. 2) на каждой половине а-Ь одной волны выполнена переменной умень- шающейся в сторону перемещения по ней стержня 8 стакана б ведущего звена 5 от торца к торцу ведомого звена 9, и оканчивается углублением Н следующей половины c-d волны канавки, а число стержней 8 на стакане 6 ведущего звена 5 равно или меньше числа волн волнистой канавки ведомого звена 9.
Согласно фиг, 3 поперечные сечения канавок а-Ь и c-d звена 9 выполнены по форме поперечных сечений стержней 8. С целью повышения технологичности (фиг. 4) поперечные сечения канавок а-Ь и c-d выполнены прямоугольными, а дно канавок и
половины волн а-b и c-d канавок выполнены прямолинейными (фиг. 5 и 6). На фиг. 6 стрелками показаны направления перемещения стержней 8 по канавкам. С целью
снижения динамических нагрузок форму канавки a-b-c-d выполняют близкой к синусоиде.
По фиг. 7 с целью снижения габаритов стержни 8 жестко закреплены на одном кон0 це плоских пружин 11, размещенных над пазами 12 в стенке с внутренней стороны цилиндрической полости стакана б ведущего звена 5, а другим концом пружина 11 жестко закреплена на стакане 6. Для повы5 шения надежности усилия пружин стержней 8 выполнены регулируемыми. В частности, стержни 8 подпружинены цилиндрическими пружинами 7, а регулировка усилия прижима осуществляется прижимной гайкой 13.
0 При выполнении пружины плоской конструкции (фиг. 8) с целью обеспечения удобства регулировки пружины 11 размещают над пазами 12 в стенке стакана б с наружной стороны, а регулировка усилия прижима
5 осуществляется специальным резьбовым кольцом 14, установленным на стакане б с возможностью перемещения и фиксации.
С целью снижения уровня шума и вибраций при работе привода между торцом
0 головки и корпусом установлен упругий демпфер 15 (фиг. 1).
Для исключения влияния ошибок установки стержней 8 на несущую способность стержни 8 и гнезда стакана 6 разделены
5 упругими втулками 16 (фиг. 3).
С целью обеспечения ручного привода в аварийном режиме ведущее звено может быть связано с помощью муфты 17 включения с ползуном 18 синусного механизма с
0 кривошипом 19, снабженного ручкой 20.
Электромеханический привод работает следующим образом.
Электромагнит привода приводится в движение от сети переменного тока через
5 БП. УПУ 2 задает необходимое число импульсов. При подаче импульса тока на электромагнит 3 сердечник 5 втягивается в его катушку, осуществляя прямое перемещение ведущего звена. Обратное перемещение ве0 дущего звена 5 осуществляется под действием возвратной пружины 4. При этом стержни 8 со сферическими наконечниками, взаимодействуя с поверхностью замкнутой волнистой канавки a-b-c-d, перемещают
5 ведомое звено 9. При взаимодействии стержня 8 на участке а-Ь ведомое звено 9 перемещается на одну половину углового шага волнистой канавки, а на участке c-d - на другую половину углового шага. Обратное движение ведомого звена исключается в
связи с тем, что в конце участка а-Ь одной полуволны канавки стержень 8 под действием пружины 7 утопает в углубление Н начала участка c-d второй полуволны канавки. В результате реализуется шаговое угловое перемещение ведомого звена 9, причем число шагов равно числу подаваемых блоков управления импульсов.
В аварийном режиме при падении напряжения в сети ведущее звено 9 привода приводится в движение вращением ручки 20 кривошипа 19 синусного механизма.
Формула изобретения 1. Электромеханический привод, содер- жащий корпус, установленные в нем электромагнит с катушкой, втягивающийся якорь с возвратной пружиной и направляющим устройством, удерживающим якорь от проворачивания, выходной вал, расположен- ный соосно с якорем, и передающее устройство для преобразования во звратно- поступательного движения якоря в угловое перемещение выходного вала, один из элементов которого снабжен радиально уста- новленными стержнями, отличающий- с я тем, что, с целью повышения надежности и технологичности, устройство преобразования движения выполнено в виде жестко соединенного с якорем и жестко соединен-
0
5
ного с выходным валом диска, установленного в полости стакана, стержни расположены по периметру внутренней поверхности стакана, поверхность диска снабжена замкнутой волнообразной канавкой, причем один конец каждого стержня установлен в гнезде на внутренней поверхности стакана и подпружинен относительно него, а другой опирается на дно канавки, глубина каждой полуволны канавки выполнена переменной от торца.к торцу диска с постоянным углом наклона и оканчивается углублением следующей полуволны, а число стержней на стакане равно или меньше числа волн канавки.
2.Привод по п. 1, отличающийся тем, что поперечное сечение канавок выполнено прямоугольным.
3.Привод по п. 1. отличающийся тем, что, с целью снижения динамических нагрузок, форма канавки по глубине выполнена синусоидальной.
4.Привод по п. 1, отличающийся тем, что, с целью исключения влияния точности установки стержней на долговечность элементов трения, стержни разделены со стенками гнезд упругими втулками.
5.Привод по пп. 1-3, отлича.ющий- с я тем, что, с целью обеспечения ручного привода в аварийном режиме, якорь снабжен ползуном синусного механизма.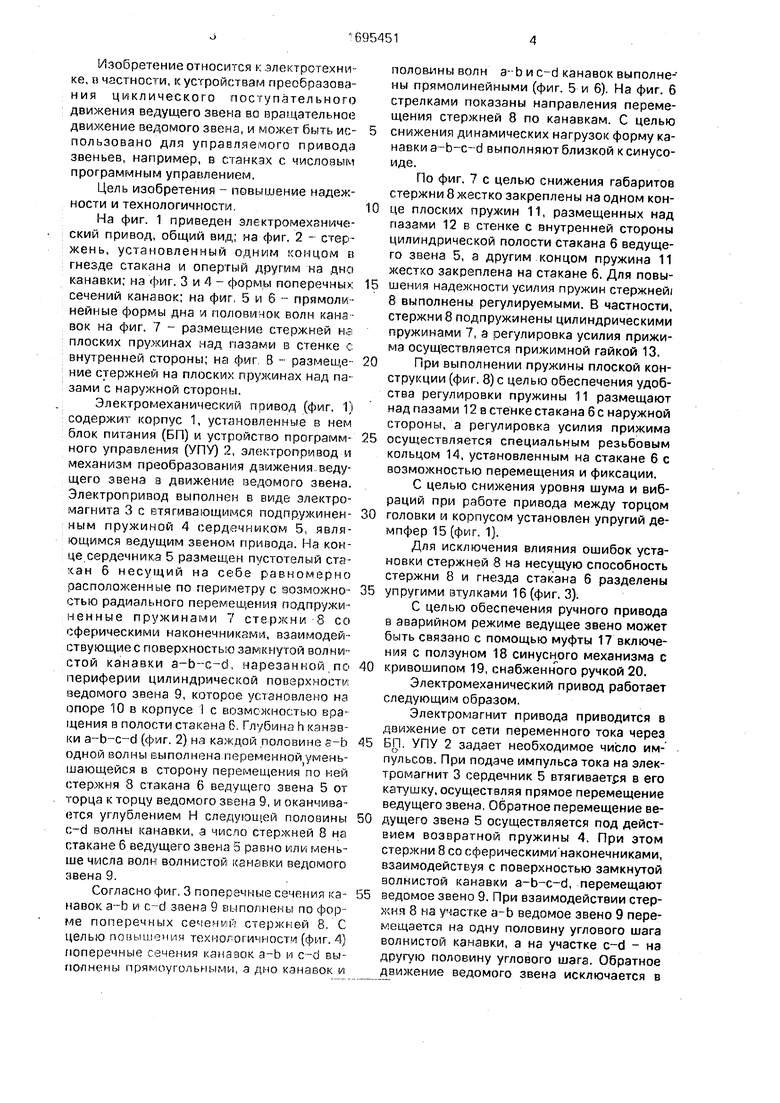
| название | год | авторы | номер документа |
|---|---|---|---|
| Синусная многорядная передача | 1990 |
|
SU1737188A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| ФРИКЦИОННЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА ИМПУЛЬСНОГО ВАРИАТОРА | 1970 |
|
SU282850A1 |
| Пружинная муфта | 1979 |
|
SU842269A1 |
| Сочлененное транспортное средство | 1986 |
|
SU1357299A1 |
| ЗУБЧАТАЯ МУФТА | 2007 |
|
RU2335669C1 |
| Полуавтомат для обработки деталей типа полусфер | 1972 |
|
SU477826A1 |
| ЗАМОК | 1995 |
|
RU2090720C1 |
| Ротор для механической обработки заготовок | 1973 |
|
SU442043A1 |
| СИНУСОЭКСЦЕНТРИКОВАЯ ПЕРЕДАЧА | 1990 |
|
RU2036352C1 |
Изобретение относится к электротехнике, а именно к приводам звеньев в станках с числовым программным управлением. Цель состоит в повышении надежности и технологичности. Электропривод состоит из корпуса 1, установленных на нем блока питания и устройства 2 программного управления, электропривода и механизма .преобразования движения. Электропривод содержит электромагнит 3 с втягивающимся подпружиненным пружиной 4 якорем 5. На конце якоря 5 размещен стакан 6, несущий равномерно распределенные по периметру внутренней цилиндрической поверхности подпружиненные пружинами 7 стержни 8, взаимодействующие с поверхностью замкнутой волнообразной канавки, нарезанной на цилиндрической поверхности ведомого звена 9, которое установлено на опоре 10с возможностью вращения в полости стакана 6. Глубина полуволны канавки выполнена переменной от торца к торцу ведомого звена 9 и заканчивается углублением следующей полуволны. Привод работает следующим образом. Возвратно-поступательное движение якоря 5 электромагнита 3 передается за счет жесткой связи на стакан 6 и стержни 8. Стержни движутся возвратно-поступательно и, взаимодействуя с поверхностью канавки на поверхности звена 9, дискретно разворачивают его. Резкий перепад глубин в конце полуволны канавки препятствует обратному повороту звена 9. Размещение стержней по периметру стакана 6 увеличивает равномерность давления на ведомое звено, кроме того, удаление от выходной оси приводит к снижению давления на ведомое звено, что значительно повышает надежность. Нанесение канавки на внешней поверхности ведомого звена увеличивает технологичность. 4 з.п. ф-лы, 8 ил. ы W Ј о ю СП Јь ся
Фиг. 5
Фиг.З
ФигЛ
Фиг. 6
I
ft
J-L
1
//
Фиг. 1
8
11
Фиг. 8
| ЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1972 |
|
SU421095A1 |
