со входом интегратрра Я, выходом соединенного с управляющим входом регулирующего элемента 5. Регулирующий элемент 5 включен в цепь отрицательной обратной связи основного усилителя . Выход основного усилителя соединен со входом пикового детектора 9 выход которого соединен со входом блока выборки-хранения 10, ВЫ ход последнего соединен с индикатором 12. Выходы тактового генератора 11 соединены с управляющими входами пикового детектора 9 и блока выборки - хранения 10.
Устройство работает следующим образом.
Электрический сигнал датчика 1 вибрации, закрепленного на подшипниковом узле, например, электрической машины, усиливается усилителем 2 и поступает на вход фильтра 3, где v происходит выделение из общего виброси нала сигналов в информационной полосе частот. Затем частотно-селектирован- ный сигнал подается на вход основного усилителя kt где происходит усиление сигнала. Затем усиленный CHI- нал поступает на вход усилителя - ограничителя 6. Усилитель - ограничитель служит для усиления сигнала и его ограничения на уровне, превышающем уровень среднешумов ого сигнала в 2 - 2,5 раз. Сигнал с выхода усилителя-ограничителя 6 подается на вход детектора 7, где происходит детектирование сигнала, затем детектированный сигнал поступает на вход интегратора 8. На выходе интегратора сигнал будет пропорционален среднему уровню шумовой составляющей сигнала. С выхода интегратора сигнал подается на вход управления регулирующего элемента 5, включенного в цепь отрицательной обратной связи усилителя k. Таким образом, замыкается цепь автоматической регулировки усиления основного усилителя k и на его выходе поддерживается постоянный уровень среднешумовой составляющей сигнала без учета среднего уровня ударных импульсов благодаря наличию в цепи обратной связи усилителя-ограничителя 6 и интегратора 8.
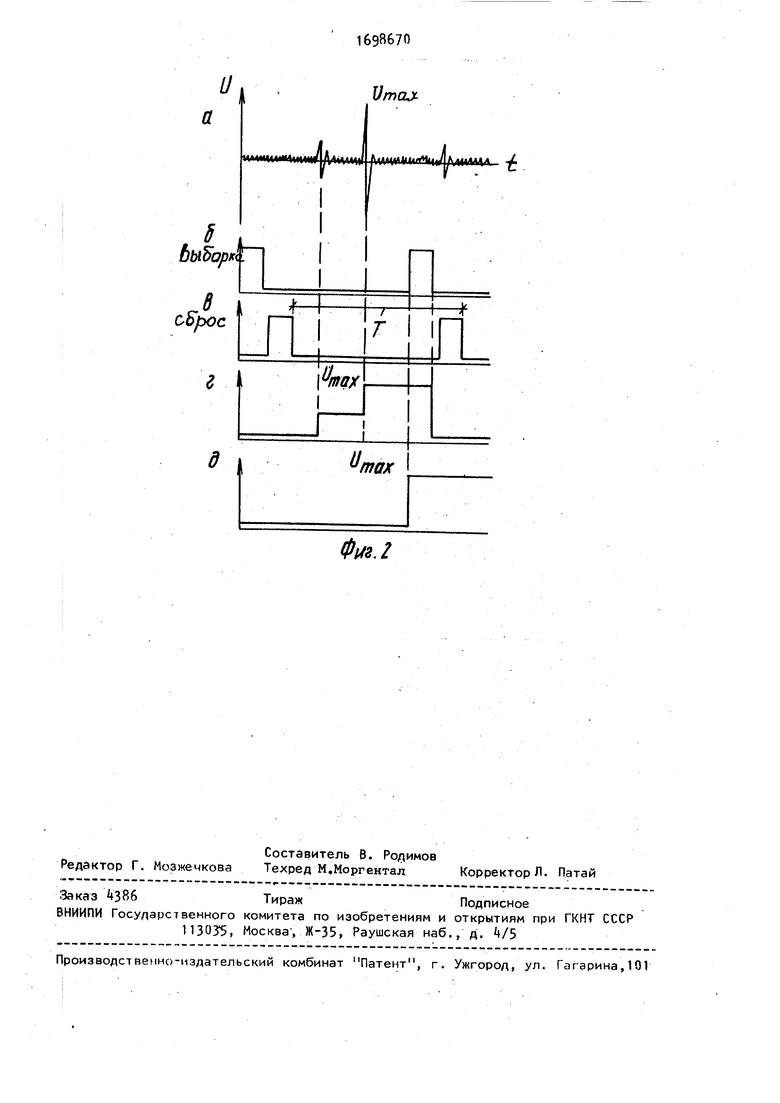
К выходу усилителя k подключен вход пикового детектора 9. Сигнал иа выходе пикового детектора равен максимальной амплитуде нормированног вибросигнала за некоторый период
Q
Q 5 ,.
0
0
времени, определяемый тактовым генератором 11, по истечению которого и сигналу Сброс генератора 11 происходит обнуление пикового детектора 9. С выхода детектора 9 сигнал подается на вход блока выборки-хранения 1О, к выходу которого подключен индикатор 12. Генератор 11 формирует сигнал выборки, для управления блоком выборки-хранения 10, перед импульсом сброс для управления детектором 9. Таким образом в блоке 10 выборки-хранения происходит циклическая перезапись информации о максимальной амплитуде сигнала за период, измерения. На фиг., показаны сигналы на выходе усилителя А (а), генератора 11 (б,в) пикового детектора 9 (г) и блока выборки-хранения 10 (д). Как видно из приведенных кривых, на фиг.2 показания индикатора 12 будут пропорциональны максимальной амплитуде нормированного вибросигнала за предыдущий период времени Т. Период Т выбирается большим периоду полного поворота сепаратора контролируемого подшипника. Шкала индикатора градуируется в безразмерной величине - соотношения пикового уровня сигнала к среднешумовому. Математически возможность градуировки индикатора в данной величине объясняется следующим выражением:
v Ниш ,
KC иср ш
где Kd - коэффициент амплитуды; U - максимальное значение
вибросигнала;
Ufp jj,- средний уровень шумового сигнала без учета ударных импульсов. В нашем случае I) с« ш const,
тогда
ка а и№ах , 1
гле а -.
исрш
Значение коэффициента а учитывалось соответствующей градуировкой шкалы индикатора. Определение состояния подшипника по показаниям индикатора устройства производят посредством сравнения с заранее определенным значением данной величины для исправного подшипникового узла и узла с различным видом дефекта.
51
Благодаря использованию в качестве критерия состояния подшипникового узла безразмерной величины - соотношения пикового уровня вибросигнала к его среднешумовой составляющей на результат контроля не оказывают влияния такие посторонние факторы, как частота вращения контролируемого узла, количество и вид смазки, количество дефектов.
Усилитель, охваченный цепью автоматической регулировки усиления, позволяет исключить влияние на показания индикатора устройства характеристик акустического тракта контролируемый подшипник - датчик, а также параметров датчика, т.е. на результат контроля не влияет мес- то и способ крепления датчика, что значительно упрощает технологию контроля.
Исключение влияния на показания устройства посторонних факторов по- вышает точность и достоверность результатов контроля подшипникового узла.
06
Формула изобретения
Устройство для контооля состояния подшипников качения, содержа- щее датчик вибрации, соединенный с предварительным усилителем, основной усилитель, фильтр, регулирующий элемент, среднеквадратичный детектор и индикатор, отличающееся тем, что, с целью повышения точности контроля,в него дополнительно введены усилитель-ограничитель, интегратор, пиковый детектор, блок выборки-хранения и тактовый генератор, причем предварительный усилитель через фильтр соединен с основным усилителем, выход которого через регулирующий элемент связан с вторым входом основного усилителя и через последовательно соединенные усилитель-ограничитель , среднеквадратичный детектор и интегратор - с вторым входом регулирующего элемента, а также о индикатором через последова-. тельно соединенные пиковый детектор и блок выборки-хранения, к вторым ; входам которых подключены выходы так тового генератора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| Устройство для контроля подшипников качения | 1990 |
|
SU1712807A1 |
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| МИКРОПРОЦЕССОРНЫЙ ВИБРОМЕТР | 1995 |
|
RU2098777C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ | 2010 |
|
RU2492441C2 |
| Устройство для виброакустической диагностики роторных машин | 1990 |
|
SU1762131A1 |
Изобретение относится к машиностроению, в частности к аппаратуре контроля оборудования, и может быть использовано для контроля состояния подшипников качения электрических машин в процессе эксплуатации. Цель- повышение точности контроля состояния подшипников. Устройство содержит датчик вибрации, подключенный к последовательно соединенным предварительному усилителю, фильтру и осИзобретение относится к машиностроению, в частности к аппаратуре контроля оборудования, и может быть использовано для контроля состояния подшипников качения злектричес- 1ких машин в процессе эксплуатации. Цель изобретения - повышение точности контроля состояния подшипников. На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - диаграмма работы блоков устройства. Устройство содержит датчик 1 виб- рации, предварительный усилитель 2, новному усилителю. В цепь обратной связи последнего включен регулирующий элемент, а параллельно ему после довательно соединенные усилитель- ограничитель, среднеквадратичный детектор и интегратор. Индикатор состояния подшипникового узла через блок выборки - хранения и пиковый детектор, Синхронизируемые тактовым генератором, подключен к выходу основного усилителя. С целью исключения влияния посторонних факторов (частота вращения контролируемого узла, количество и вид смазки, количество дефектов) на результат контроля, в качестве критерия состояния подшипникового узла используется безразмерная величина - соотношение пикового уровня вибросигнала к его среднешумовой составляющей. На результат контроля не влияет место и способ крепления датчика вибрации. 2 ил. 9 фильтр 3, основной усилитель регулирующий элемент 5, усилитель-ограничитель 6, среднеквадратичный детектор 7, интегратор 8, пиковый детектор 9j блок 10 выборки - .хранения, тактовый генератор 11 и индикатор 12. Датчик 1 вибрации, предварительный усилитель 2, фильтр 3 и основной усилитель 4 соединены последовательно. Выход основного усилителя 4 соединен со входом усилителя - ограничителя 6, выход которого через среднеквадратичный детектор 7 соединен Ь со 00 О5 J
ФигЛ
It
|Л%1ЛшЛ ftl MMji/ hlMi ftАЛЛМАЛ V Ггпгтцп ivyv-цптт iiriivMvui iii Ј
f
S
bb&ap
j
cbpoc
)majЙ
max
Фм.2
| Способ контроля состояния подшипников качения в процессе эксплуатации и устройство для его осуществления | 1978 |
|
SU775650A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
