вень повреждения подшипника без конкретизации вида дефекта, что не позволяет точно прогнозировать сроки выхода из строя подшипника, При перегрузке устройства пиковыми значениями вибросигнала, которые могут быть срезаны при насыщении пикового детектора, происходят утеря информации и снижение точности контроля.
Цель изобретения - повышение точности и надежности контроля и расширение функциональных возможностей устройства,
Это достигается тем, что устройство контроля подшипников качения, содержащее последовательно соединенные преобразователь и усилитель, а также фильтр. блок определения среднеквадратичного значения амплитуд, делитель и индикатор, снабжено блоком автонормирования, первым и вторым амплитудными детекторами, четырьмя управляемыми узкополосными фильтрами, датчиком скорости и коммутатором. При этом вход блока автонормирования соединен через усилитель с преобразователем, а выход через фильтр с первым амплитудным детектором, к выходу которого подключены входы четырех управляемых узкополосных фильтров, настроенных на разные частоты пропускания, к управляющим входам которых подключен датчик скорости, а выход их через коммутатор подключен на вход второго детектора, который соединен с первым входом делителя, второй вход которого через блок определения среднеквадратичного значения амплитуд соединен с фильтром, выход делителя соединен с входом индикатора.
В основу изобретения положено определение параметров сигналсз высокочастотных аибраций на информативной полосе частот,
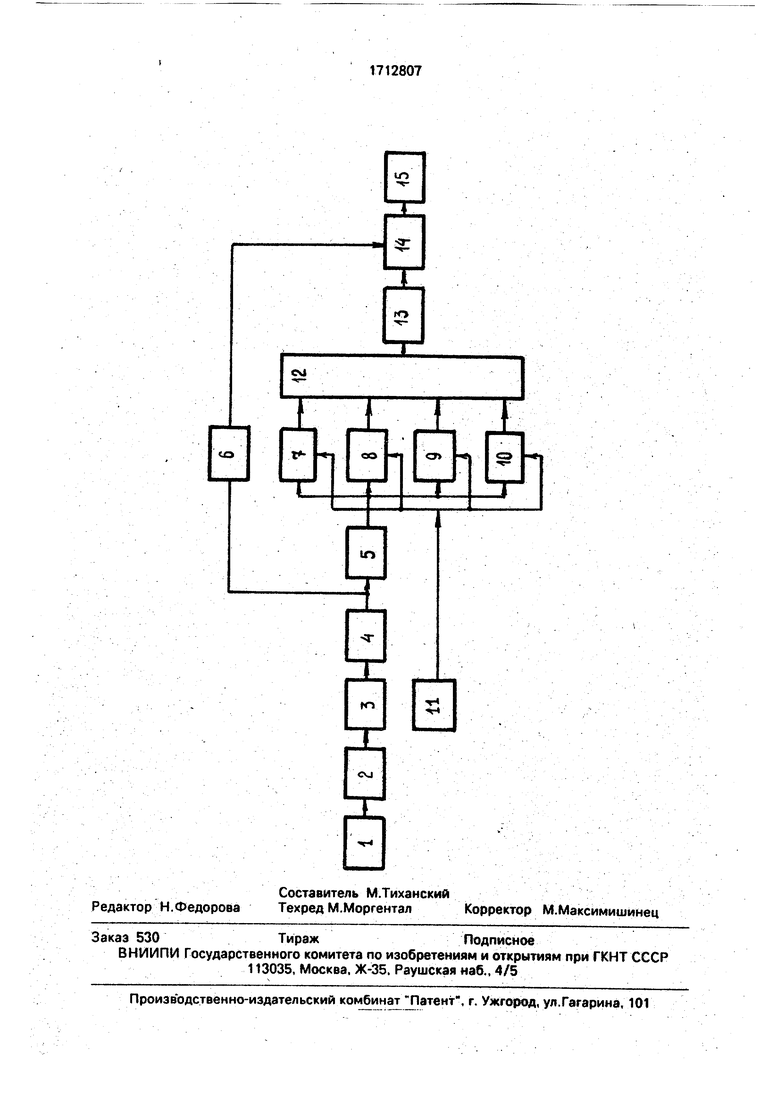
На чертеже показана структурная схема устройства.
Устройство содержит последовательно соединенные преобразователь 1 (например, пьезоэлектрический), усилитель 2,блок 3 автонормирования, фильтр 4 резонансных частот подшипника, к которому подключены первый амплитудный детектор 5 и блок 6 определения среднеквадратичного значения, выход первого амплитудного детектора подключен к основным входам четырех управляемых узкополосных фильтров 7-10, к управляющим входам которых подключен датчик 11 частоты вращения, выходы узкополосных фильтров через коммутатор 12 подключены ко второму амплитудному детектору 13, выход которого сбединеи с вторым входом делителя 14, первый вход
которого соединен с выходом блока 6, а выход-- с индикатором 15.
Устройство работает следующим образом.
Преобразователь 1 принимает вибрации подшипника, которые преобразует в электрический сигнал. Электрический сигнал с преобразователя 1 поступает на предварительный усилитель 2, где усиливается, и далее - в блок 3, где производится нормировка сигнала по пиковому его значению. С блока 3 нормированный сигнал поступает на фильтр 4 выделения резонансной частоты подшипника, который из сигнала выделяет информативную полосу частот в полосе кГц, Информативные частотные полосы зависят от объекта и устанавливаются заранее из aмплитyднo-чacтotнoгo спектра сигнала, В качестве информативной частоты можно принять частоту резонанса fp внешней обоймы подшипника, которая определяется по формуле
f - R()
Р 27даТ| j,2 m
где R - порядок резонанса (в данном случае R 2); а - радиус нейтральной оси; 1 - момент инерции площади поперечного сечения; m - удельная линейная масса обоймы. Ширина полосы информативной частоты определяется по формуле
A.f 2 Г fинф-fб 1 .,
где fинф - информативная частота вибрации подшипника;.
f б - ближайшая к информативной частота проявления виброактивности сочлененных неконтролируемых деталей объекта.
Местные неисправности подшипников приводят к возникновению серии механических ударов, которые периодически повторяются с частотой, зависящей от геометрических характеристик подшипника. Различная частота повторения говорит о наличии неисправности различных деталей подшипника. Имеются следующие частоты повторения или информативные частоты подшипников:
-частота прохода шарика по внешней обойме fno, указывающая на неисправность внешней обоймы;
-частота прохода шарика по внутренней обойме feo, указывающая на дефекты внутренней обоймы;
-частота вращения шарика или ролика Mfp), указывающая на дефекты вращающегося злемента;
- основная частота foe, указывающая на повреждение сепаратора подшипника.
Расчет этих частот производится следующим образом:
fHo ZfB/2 -d/D /, fBo Z - 18/2- 1 + d/D-cos Яfm(fp) D fB/2d - (d/D - cos ftf, foc fB/2-fl-d/D-cos,
где Z - число щариков или роликов;
fe-частота вращения вала (т.е. скорость внешней обоймы по отношению к внутренней);
d - диаметр шариков или роликов;
D - диаметр делительной окружности шариков или роликов;
/9 - угол контакта, отсчитываемый от радиального направления.
С выхода фильтра 4 сигнал поступает одновременно на блок определения среднеквадратичного значения и амплитудный детектор 5, который выделяет огибающую информативной nactoTM данного сигнала. Полученный сигнал поступает на основные входы управляемых узкополосных фильтров 7-10, средние частоты пропускания кото рых определяются по выше приведенным формулам. Однако эти частоты зависят от изменения скорости, поэтому на управляющие входы узкополосных фильтров подают сигнал с датчика 11, при этом при изменении скорости вращения механизма соответственно изменяются средние частоты пропускания узкополосных фильтров 7-10. В зависимости от того, какой дефект контролируется, cootвeтcтвyющvlй узкополосный фильтр соединяется через коммутатор 12 со вторым детектором 13, при этом сигнал с узкополосного фильтра детектируется
и поступает на второй вход делителя 14 (ид), на первый вход которого поступает с{)еднеквадратичное значение вибросигнала U, где вычисляется их отношение Уд/и. Сигнал с
делителя поступает на индикатор 15. Шкала индикатора проградуирована в безразмерных единицах для каждого дефекта отдельно, минимальные значения которых выражают исправное состояние отдельных
частей подшипника, их увеличение - степень развития соответствующего дефекта.
Таким образом, обеспечиваются своевременное выявление и развитие дефекта, появляется возможность планового ремонта механизмов, предупреждаются аварийные ситуации.
Ф о р м у л а и 3 о б р е т е н и я Устройство для контроля подшипников
качения, содержащее последовательно соединенные преобразователь и усилитель, а также фильтр, выходом соединенный с блоком определения среднеквадратичного значения амплитуд и первым амплитудным
детектором, выход которого через делитель связан с индикатором, отличающееся тем, что. с целью повышения точности контроля, оно снабжено блоком автонормйрования, вторым амплитудным детектором.
четырьмя управляемыми узкополосными фильтрами, датчиком частоты вращения и коммутатором, причем блок автонормирования включен между усилителем и фильтром, информационные входы управляемых
узкополосных фильтров подключены к выходу амплитудного детектора, управляющие входы - к датчику частоты вращения, а выходы через коммутатор и последовательно соединенный с ним второй амплитудный детектор - к второму входу делителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОР ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ КАЧЕНИЯ | 1992 |
|
RU2036455C1 |
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для контроля подшипников качения | 1983 |
|
SU1111049A1 |
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU916999A1 |
| Устройство для вибрационной диагностики состояния подшипников качения | 1981 |
|
SU987438A1 |
| СПОСОБ МУЛЬТИФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ В ИНТЕГРАЛЬНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2728485C1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ ЗАХАРОВА - MDZ | 1996 |
|
RU2133455C1 |
| Устройство для диагностики редуктора | 1990 |
|
SU1739242A1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2029253C1 |
Изобретение относится к техническому диагностированию, в частности к средствам автоматического контроля, проверки и прогнозирования функционального состоянияподшипников качения по виброакустическим параметрам. Цель изобретения - повышение точности контроля. Устройство позволяет проследить зарождение и развитие; дефекта конкретного элемента подшипника путем обработки огибающей резонансной частоты вибрации с помощью гребенчатых узкополосных фильтров, управляемых по скорости и настроенных на частоты, информативные для характерных контролируемых дефектов. Точность контроля повышается за счет корректировки полосы пропускания узкополосных гребенчатых фильтров в зависимости от частоты вращения подшипникового узла. 1 ил.Изобретение относится к диагностике технического состояния подшипников по виброакустическим параметрам и может быть использовано в горнодобывающей, металлургической и др. отраслях промышленности.Известно устройство для контроля подшипников качения, содержащее последовательно соединенные преобразователь, усилитель, фильтр, демодулятор для амплитудного детектирования сигналов, анализатор спектра, блок вычисления, пороговое устройство, блок совпадения и индикатор.В основу работы этого устройства положен анализ огибающей случайных вибраций, полученной путем амплитудного детектирования выходного сигнала обьекта контроля. По огибающей сигнала определяется амплитудно-частотный спектр огибающей, дальнейшая обработка которого дает оценочный показатель контроля. Однако огибающая сигнала не дает возможностьпроводить оценку состояния подшипника по его действительным сигналам, так как при амплитудном детектировании искажается часть информации о мощности сигналов высокочастотных вибраций, которые наиболее информативны для контролируемого обьекта - подшипника качения. Известное устройство содержит сложные блоки и не дает полной информации о состоянии подшипника.Наиболее близким к предлагаемому является устройство для контроля подшипников качения, содержащее последовательно соединенные преобразователь, усилитель и фильтр, к которому подключены пиковый детектор и блок определения среднеквадратичного значения амплитуд, а также блок вычисления и индикатор. В данном устройстве упрощена конструкция и повышена точность за счет учета при измерениях неоднородности виброакустического контакта. Однако устройство определяет общий уро-feГО 00оXI
| Устройство для контроля подшипников качения | 1983 |
|
SU1111049A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
