Изобретение относится к автоматизации и механизации и может быть использовано в системах управления технологическим обо рудованием с применением ЭЛРСтронных средств управления
Под термином управляемые механизмы понимаются рабочие органы (механизмы) объект управления, изменяющие свое состояние или положение R процессе управления.
Под термином исполнительные механизмы понимаются электрические аппараты или устройства непосредственно срабатывающие под воздействием управляющего сигнала и через посредство которых приводятся в движение механизмы объекта управления.
Под термином возбужденное состояние нормализатора понимается реакция нормализатора на воздействие напряжением, в результате которой в нем происходит изменение величины выходного сигнала.
Под термином невозбужденное состояние нормализатора понимается состояние нормализатора без воздействия на него напряжением или с воздействием напряжением недостаточным для изменения величины его выходного сигнала.
Цель изобретения - повышение надеж- ност работы управляемого объекта.
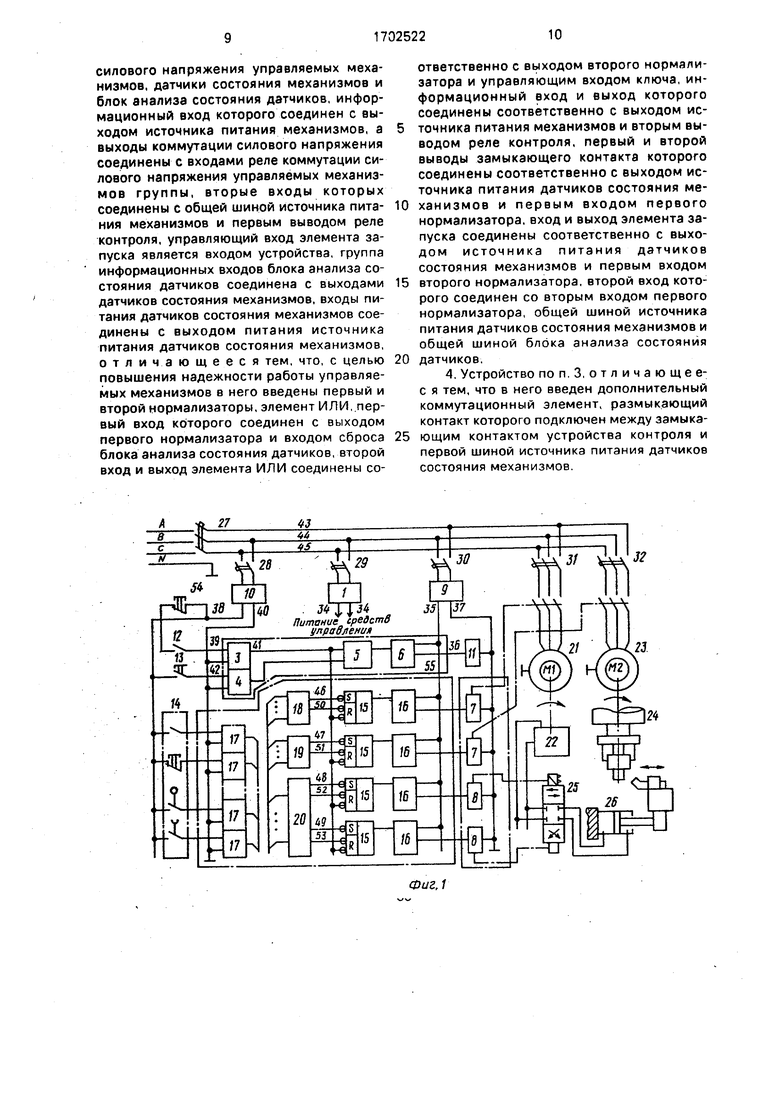
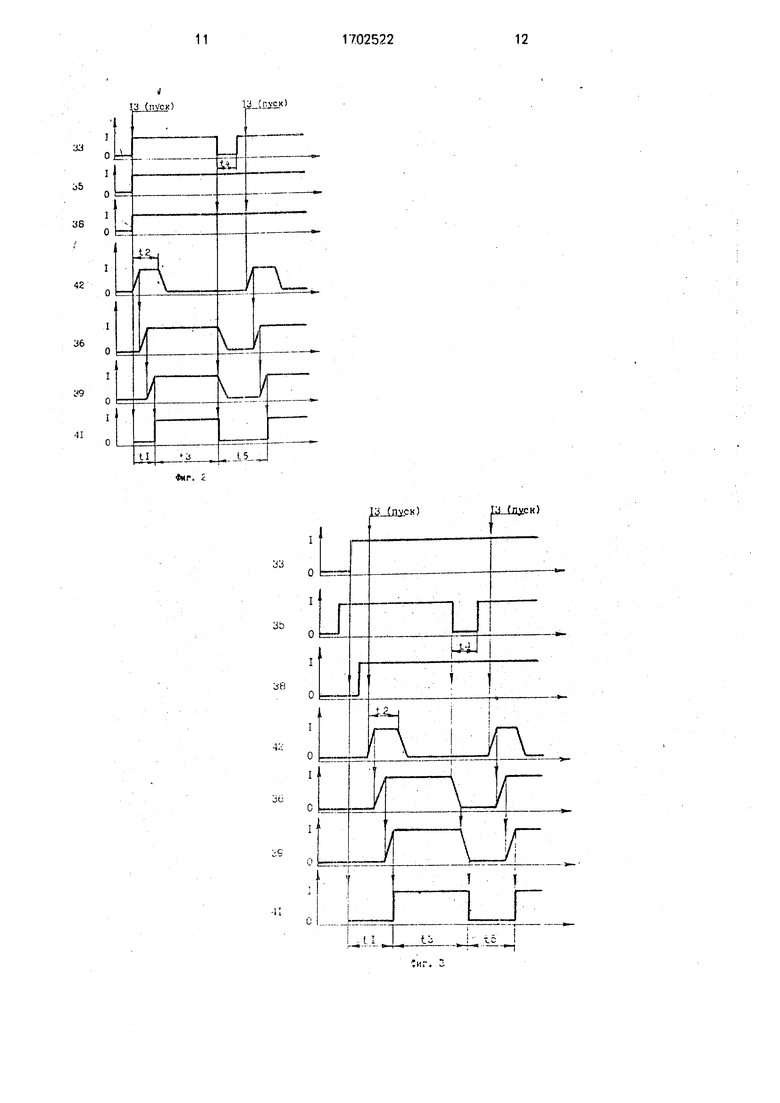
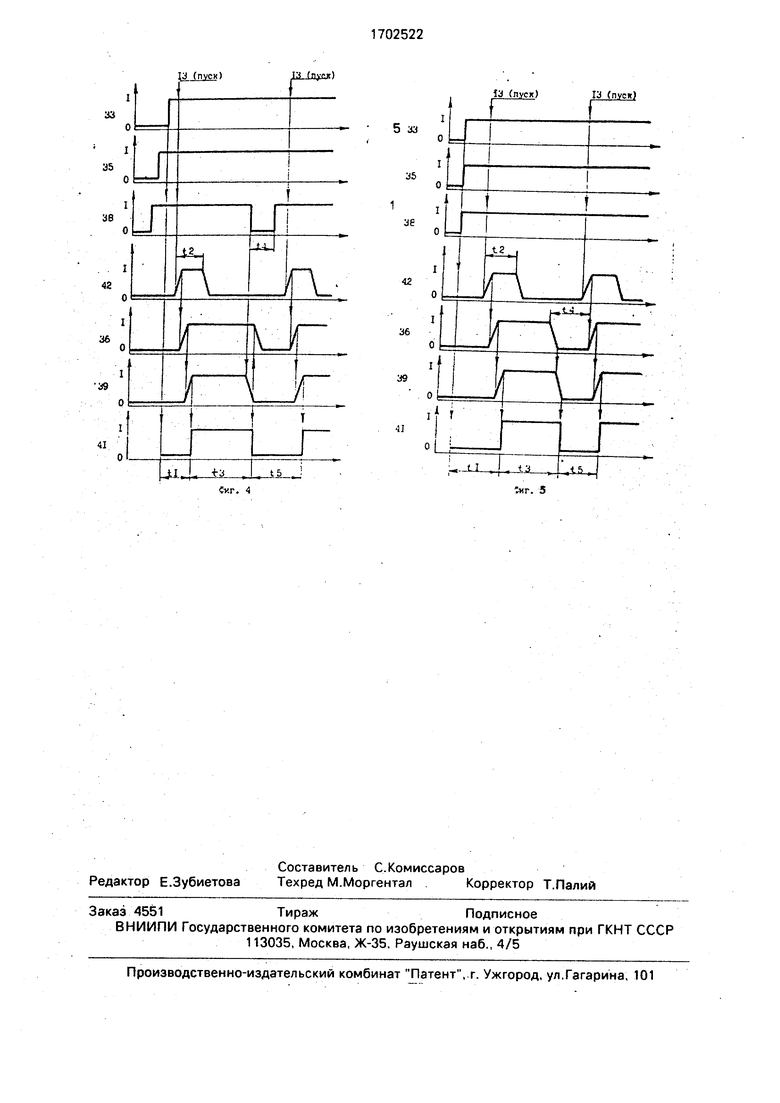
На фиг. 1 приведена схема управления объектом, на фиг. 2...5 изображены временные диаграммы работы устройства, где 33, 35,38,42,36,39,41 - временные диаграммы напряжений соответственно: 33 - на выходе источника питания средств управления, 35 - на выходе источника питания механизмов. 38 - на выходе источника питания датчиков, 42 - на входе .второго нормализатора, 36 - на входе реле контроля, 39 - на входе первото нормализатора, 41 - временная диаграмма напряжений сигнала установки в исходное состояние схем блока анализа состояния датчиков на выходе первого нормализатора, ti и ts - время действия сформированного сигнала установки в исходное состояние блока анализа состояния датчиков, ta - время возбужденного состояния второго нормализатора, t3 - время возбужденного состояния первого нормализатора, t4 - время неисправного состояния источника питания (на фиг. 2...4) или реле контроля (на фиг. 5).
Устройство для предотвращения самопроизвольных движений управляемых механизмов содержит (фиг. 1) источник 1 питания средств управления, блок 2 анализа состояния датчиков, первый нормализатор 3, второй нормализатор 4, элемент ИЛИ 5, ключ 6, группу реле 7, группу электромагнитов 8, источник 9 питания механизмов, источник 10 питания датчиков, реле 11 контроля с замыкающим контактом 12, элемент 13 запуска, датчики 14 состояния механизмов, группа элементов 15 памяти, точка соединения первых входов сброс которых является входом сброс блока 2 анализа состояния датчиков, группа ключей 16, выходы которых являются выходами коммутации силового напряжения блока 2 анализа
состояния датчиков, а точка соединения входов этих ключей является информационным входом блока 2 анализа состояния датчиков, группа нормализаторов 17, первые
входы которых являются информационными входами блока 2 анализа состояния датчиков, а точка соединения вторых входов является общей шиной блока 2 анализа состояния датчиков, каналы 18-20 управле0 ния, привод 21 гидронасоса 22, привод 23 шпинделя 24, гидрораспределитель 25, гидроцилиндр 26 подачи инструмента, выключатели 27-32.
Устройство содержит дополнительный
5 коммутационный элемент 54.
Блок 55 средств контроля содержит
нормализаторы 3, 4. элемент ИЛИ 5, ключ 6.
Группа 56 реле коммутации силового
напряжения содержит группу реле 7 и груп0 пу электромагнитов 8.
При этом, источник 1 питания средств управления соединен шинами 33, 34 с шинами питания блока 2 анализа состояния датчиков. Информационный вход блока 2
5 анализа состояния датчиков соединен с информационным входом ключа 6 и выходом
35источника 9 питания механизмов. Выходы коммутации силового напряжения блока
2анализа состояния датчиков соединены 0 соответственно с первыми входами группы
реле 7 коммутации силового напряжения. Выход ключа 6 соединен с вторым входом
36реле 11 контроля. Вторые входы группы реле 7 коммутации силового напряжения со5 единены с первым входом реле 11 контроля и общей шиной 37 источника 9 питания механизмов. Информационные входы блока 2 анализа состояния датчиков соединены соответственно с выходами датчиков 14. Вхо0 ды питания датчиков 14 соединены с выходом 38 источника 10 питания датчиков и с входом элемента 13 запуска. Первый вывод замыкающего контакта 12 соединен с выходом 38 источника 10 питания датчи5 ков. Первый вход 39 первого нормализатора
3соединен со вторым выводом замыкающего контакта 12 реле 11 контроля, второй вход первого и второго нормализаторов 3. 4 соединены с общей шиной 40 источника пи0 тания датчиков и общей шиной блока 2 анализа состояния датчиков. Выход 41 первого нормализатора 3 соединен с первым входом элемента 5 ИЛИ и входом сброса блока 2 анализа состояния датчиков. Первый вход
5 42 второго нормализатора 4 соединен с выходом элемента 13 запуска, а выход второго нормализатора 4 соединен с вторым входом элемента ИЛИ 5. Выход элемента ИЛИ 5 соединен с управляющим входом ключа 6. Выходы элементов 15 памяти соединены соответственно с управляющими входами ключей 16. Выходы группы нормализаторов 17 связаны с входами каналов 18-20 управления. Автоматические выключатели 28...32 включены соответственно между шинами 43-45 питания и источником 10 питания датчиков, источником 1 питания средств управления, источником 9 питания механизмов, приводом 21 гидронасоса 22, приводом 23 шпинделя 24. Гидроцилиндр 26 связан гидравлически через гидрораспределитель 25 с гидронасосом 22. Выходы 46-49 каналов 18-20 управления соединены соответственно со входами 8 элементов 15 памяти. Выходы 50-53 каналов 18-20 управления соединены соответственно с дополнительными входами R элементов 15 памяти. Между замыкающим контактом 12 устройства контроля и выходом 38 источника 10 питания датчиков подключен размыкающий контакт дополнительного коммутационного элемента 54.
Осуществляют способ следующим образом. После включения средств управления производят суммарный контроль наличия напряжений источника питания датчиков, источника питания управляемых механизмов в следующей последовательности: вначале подключают источник питания датчиков к первому нормализатору и проверяют наличие уровня напряжения источника питания датчиков путем возбуд- жения этого нормализатора напряжением источника питания датчиков и преобразования этого напряжения в уровень напряжения, равным единичному уровню сигнала блока анализа состояния датчиков, по которому судят о наличии напряжения этого источника, а затем, при положительном результате проверки, воздействуют на ключ, подключая этим клю- чем к шине источника питания механизмов реле контроля и проверяют наличие уровня напряжения этого источника, а затем, при получении положительного результата проверки, возбуждают второй нормализатор напряжением источника питания датчиков и также преобразовывают это напряжение в уровень логического сигнала, но которому судят о наличии напряжения на шинах источника питания датчиков и источника питания механизмов, после чего в соответствии с этим уровнем логического сигнала дополнительно воздействуют на ключ, осуществляя таким образом переход на постоянный контроль наличия напряжения источника питания датчиков и источника питания механизмов. При этом при невозбужденном состоянии второго нормализатора отключают управляемые механизмы от источника питания механизмов и источников силового напряжения, устанавливают элементы оперативной памяти блока анали- 5 за состояния датчиков в исходное состояние и прекращают воздействие на ключ, а при возбужденном состоянии второго нормализатора - производят подключение управляемых механизмов к источнику питания
0 механизмов и источнику силового напряжения, прекращают установку элементов оперативной памяти блока анализа состояния датчиков в исходное состояние и осуществляют воздействие на ключ.
5Устройство для предотвращения самопроизвольных движений управляемых механизмов, реализующее способ, работает следующим образом.
Схема приводится в рабочее состояние
0 включением источников 1,9. 10 питания в любой последовательности, как проиллюстрировано на фиг. 2 ..5. Затем, при воздействии на элемент 13 запуска, напряжение с выхода 38 источника 10 питания датчиков.
5 например, 24В+10%, подключается на вход 42 второго нормализатора 4, который возбуждается и преобразовывает это напряжение в уровень логической единицы, принятой для средств управления. Сигнал
0 логической единицы с выхода этого нормализатора воздействует через элемент ИЛИ 5 на ключ 6, который коммутирует вход 36 реле 11 контроля к шине 35 источника 9 питания механизмов. Посредством реле 11
5 контроля определяется наличие напряжения, при котором оно срабатывает и замыкающим контактом 12 коммутирует к шине 38 источника 10 питания датчиков вход 39 первого нормализатора 3, в котором опре0 деляется наличие напряжения источника 10 питания датчиков и производится преобразование этого напряжения в уровень логической единицы при условии наличия напряжения на входе этого нормализатора
5 и в уровень логического нуля при условии отсутствия напряжения на его входе. Сигнал логической единицы с выхода 41 первого нормализатора 3 также воздействует через элемент ИЛИ 5 на вход ключа 6. в резуль0 тате чего в устройстве устанавливается режим автоматического контроля. Сигнал логической единицы с выхода 41 первого нормализатора 3 также поступает на вход сброс блока 2 анализа состояния
5 датчиков и далее на входы R элементов 15 памяти, однако на дальнейшее функционирование этих элементов не оказывает влияния. Если на входе 39 первого нормализатора 3 напряжение источника 10 питания датчиков отсутствует, например, по
причине неисправности в источнике 9, или в реле 11 контроля, или в источнике 10 питания датчиков, то на выходе 41 первого нормализатора 3 появляется сигнал логического нуля, принятого для данных средств управления, который воздействием на входы R элементов 15 памяти устанавливает эти элементы в исходное состояние, отключая таким образом ключи 1би соответственно группу реле 7 и группу электромагнитов 8. что приводит к остановке вращения приводов 21, 23 и мгновенной остановке гидроцилиндра 26. Так как осуществление контроля источника питания механизмов и источника питания датчиков, а значит и возбуждение первого нормализатора 3 производится с запаздыванием относительно момента включения источника 1 питания средств управления (а именно после воздействия на элемент 13 запуска и срабатывания реле 11 контроля), то сразу же с включением источника 1 питания на выходе 41 первого нормализатора 3 появляется сигнал нулевого уровня, устанавливающий схемы блока 2 анализа состояния датчиков в исходное состояние, а затем после появления на входе 39 нормализатора 3 напряжения этот сигнал инвертируется в единичный уровень. С этого момента возможно управление исполнительными механизмами 7,8 путем воздействия на S входы и дополнительные R входы элементов 15 памяти сигналами управления с выходов 46...53. сформированными путем логических преобразований, соответствующих конкретным состояниям объекта, сигналов датчиков 14 посредством логических элементов каналов управления 18-20 блока 2 анализа состояния датчиков. При этом сигналы с выходов 46-49, нулевого уровня для S входов соответствующих элементов 15 памяти являются командами для установки этих элементов в единичное состояние, включающее связанный с ним соответствующий ключ 16 и исполнительный механизм 7 (8). Сигналы с выходов 50- 53 нулевого уровня для дополнительных R входов соответствующих элементов 15 памяти являются командами для установки (реверса) этих элементов в исходное состояние, отключающее связанный с ним соответствующий ключ 16 и исполнительный механизм 7 (8).
Если в процессе эксплуатации возникает какая-либо неисправность в любом из источников питания, в том числе при обрыве проводов или при неисправности самого реле контроля, то напряжение на входе 39 нормализатора 3 пропадает и сигнал установки в исходное состояние с выхода
41 нормализатора 3 отключает ключ 6 и устанавливает и удерживает элементы 15 памяти блока 2 анализа состояния датчиков в исходном состоянии (при этом, исполнительные механизмы 7 и 8 отключаются, вследствиие чего прекращается работа гидронасоса 22, вращение шпинделя 24 и движение гидроцилиндра 26) до тех пор, пока не будет устранена неисправность и схема
0 не будет приведена в состояние постоянного контроля источников питания воздействием на элемент 13 запуска, что проиллюстрировано на фиг. 2...5.
При необходимости аварийного дис5 танционного отключения исполнительных механизмов без отключения источников 1, 9, 10 питания, воздействуют на дополнительный коммутационный элемент 54. прерывая при этом осуществление посто0 янного контроля источников питания- При этом установка элементов 15 памяти в исходное состояние, отключение исполнительных механизмов 7, 8 и приведение схемы в рабочее состояние производится
5 так же как описано выше.
Формула изобретения 1. Способ предотвращения самопроизвольных движений управляемых механизмов, заключающийся в том. что при
0 включении средств управления производят отключение управляемых механизмов от источника силового напряжения и источника питания управляемых механизмов, отличающийся тем. что. с целью
5 повышения надежности, осуществляют суммарный контроль наличия напряжений источников питания датчиков состояния механизмов, источников питания управляемых механизмов и источников питания
0 средств управления и в случае положительного результата производят подключение управляемых механизмов к источнику силового напряжения и источнику питания управляемых механизмов
5 2. Способ по п. 1,отличающийся тем, что суммарный контроль наличия напряжений источников питания осуществляют последовательно-суммирующим логическим преобразованием результатов
0 контроля наличия напряжений источников питания, начиная с проверки наличия напряжения источника питания средств управления.
3. Устройство для предотвращения са5 мопроизвольных движений управляемых механизмов; содержащее источник питания датчиков состояния механизмов источник питания механизмов, реле контроля с замыкающим контактом ключ элемент запуска, группу реле коммутации
силового напряжения управляемых механизмов, датчики состояния механизмов и блок анализа состояния датчиков, информационный вход которого соединен с выходом источника питания механизмов, а выходы коммутации силового напряжения соединены с входами реле коммутации силового напряжения управляемых механизмов группы, вторые входы которых соединены с общей шиной источника пита- ния механизмов и первым выводом реле контроля, управляющий вход элемента запуска является входом устройства, группа информационных входов блока анализа состояния датчиков соединена с выходами датчиков состояния механизмов, входы питания датчиков состояния механизмов соединены с выходом питания источника питания датчиков состояния механизмов, отличающееся тем, что, с целью повышения надежности работы управляемых механизмов в него введены первый и второй нормализаторы, элемент ИЛИ, первый вход которого соединен с выходом первого нормализатора и входом сброса блока анализа состояния датчиков, второй вход и выход элемента ИЛИ соединены соответственно с выходом второго нормализатора и управляющим входом ключа, информационный вход и выход которого соединены соответственно с выходом источника питания механизмов и вторым выводом реле контроля, первый и второй выводы замыкающего контакта которого соединены соответственно с выходом источника питания датчиков состояния механизмов и первым входом первого нормализатора, вход и выход элемента запуска соединены соответственно с выходом источника питания датчиков состояния механизмов и первым входом второго нормализатора, второй вход которого соединен со вторым входом первого нормализатора, общей шиной источника питания датчиков состояния механизмов и общей шиной блока анализа состояния датчиков.
4. Устройство поп 3, отличающее- с я тем, что в него введен дополнительный коммутационный элемент, размыкающий контакт которого подключен между замыкающим контактом устройства контроля и первой шиной источника питания датчиков состояния механизмов
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ | 1996 |
|
RU2106679C1 |
| Устройство для аварийной сигнализации | 1985 |
|
SU1251146A1 |
| Устройство для приема команд телеуправления | 1984 |
|
SU1229791A1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| Устройство для блокировки пуска агрегата | 1986 |
|
SU1312520A1 |
| Устройство предварительного автоматического контроля изоляции участка электрической сети | 1989 |
|
SU1661686A2 |
| СИСТЕМА УПРАВЛЕНИЯ, КОНТРОЛЯ И РЕГИСТРАЦИИ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2293196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, КОНТРОЛЯ И РЕГИСТРАЦИИ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2292576C1 |
| Способ автоматизированного управления напорной оросительной системой | 1989 |
|
SU1706474A1 |
| Устройство для сигнализации о состоянии механизмов | 1990 |
|
SU1800471A1 |
Изобретение относится к автоматизации и механизации и может быть использовано в системах управления технологическим оборудованием с применением электронных средств управления. Цель изобретения - повышение надежности работы технологического оборудования за счет предотвращения аварийных ситуаций и поломок механизмов, связанных с самопроизвольными движениями механизмов как при включении источников питания так и при выходе из строя любого из источников питания или устройств контроля. Сущность способа заключается в первоначальном контроле источника питания датчиков. При положительном исходе контроля производится одновременный контроль источника питания механизмов. Способ реализуется устройством, содержащим источники питания датчиков, блок анализа состояния датчиков, нормализаторы, элемент ИЛИ. ключ, реле контроля с замыкающим контактом, элемент запуска, датчики состояния механизмов и исполнительные механизмы. Принцип действия устройства заключается в замыкании элемента запуска, в результате чего источник питания датчиков подключается к второму нормализатору. При исправности этого источника ключ 6 замыкается и обеспечивает срабатывание реле контроля, замыкающий контакт которого подключает источник питания датчиков к входу первого нормализатора, в результате чего формируются сигналы, включающие исполнительные механизмы. При отказе какого-либо источника питания нормализаторы формируют сигналы отключения исполнительных механизмов. 2 с. и 2 з. п. ф-лы 5 ил (Л С О го ел ю ю
27
«J
о - о -. о
с.
СТ.
1
и
о - о I
is
я
«v.r. 4
Лг. 5
| Марголин Ш | |||
| Н | |||
| и др | |||
| Функциональные узлы схем автоматического управления М.: Энергоиздат, 1983, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Л | |||
| Автоматизация управления посадкой самолета М.: Транспорт, 1972 | |||
| с | |||
| РАССЕИВАЮЩИЙ ТОПЛИВО МЕХАНИЗМ | 1920 |
|
SU298A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Устройство установки схем цифровой автоматики в исходное состояние | 1978 |
|
SU873390A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
