Изобретение относится к гироскопическим устройствам и может быть применено в других областях, например в области электрических машин, где необходимо обеспечить не только вращение сферического электро- и магнитопроводящего ротора вокруг оси, расположенной в любом заданном положении в пространстве, но и измерение этого положения.
Известны гиромоторы (ГМ) со сферическим ротором и трехосным статором, с помощью которых располагают ось вращения ротора, т.е. вектор кинетического момента (ВКМ) ротора, в любом заданном положении в пространстве (см., например, Электростатический гироскоп. Патент RU №2173446 от 18.02.1999, кл. G 01 C 19/24, а также Воскобойников Р.Л., Иванова Н.С., Колпаков А.И., Максимов М.Г. Управление движением главной оси инерции ротора свободного гироскопа. Гироскопия и навигация, №4 (27) 1999, с.10-32).
ГМ по патенту №2173446 содержит полый сферический электропроводящий ротор в электрическом подвесе. Шесть катушек ГМ расположены соосно и попарно по трем взаимно-ортогональным координатным осям, пересекающимся в центре подвеса ротора. Достоинством этого ГМ является то, что в нем обеспечивается вращение ротора вокруг оси, расположенной в любом заданном положении в пространстве. Недостатком этого ГМ является слабая связь между статором и ротором, в результате чего, приходится устанавливать в заданное положение в пространстве главную ось инерции невращающегося ротора с помощью специальных систем управления.
Наиболее близким к предлагаемому является ГМ по патенту RU №2231756, кл. G 01 C 19/02 от 15.12.2002 г., поэтому мы выбираем его в качестве прототипа.
ГМ-прототип (ГМ-П, фиг.1) содержит ферромагнитный сферический ротор, расположенный в подвесе, например, в газовом. Для повышения эффективности взаимосвязи со статором ротор должен быть не только ферромагнитным, т.е. магнитопроводящим, но и электропроводящим. Для этого на ферромагнитный ротор с большим электрическим сопротивлением наносят электропроводящий слой, например, из меди. Таким образом, в общем случае ротор должен быть электро- и магнитопроводящим, например стальным, что соответствует устройству-прототипу.
ГМ-П содержит (фиг.1, фиг.2) три кольцевых статора (КС): КСХ - 1, КСY - 2 и KCZ - 3, оси которых X, Y и Z расположены взаимно-ортогонально и пересекаются в центре подвеса ротора. Каждый КС выполнен из двухдуговых статоров 1.1, 1.2...3.1, 3.2 с обмотками, оси которых расположены под углом 90° и пересекаются в центре КС.
Диаметрально-противоположные противофазные обмотки каждого КС объединены попарно электрически в ортогональные обмотки первой и второй фазы, обеспечивающие вращение ротора вокруг оси КС, подобно асинхронному двигателю. Соединение силовых обмоток, необходимое для создания магнитного потока одного направления N-S, выполняется последовательным или параллельным и обусловлено связью между напряжением U1 (U2) и моментом.
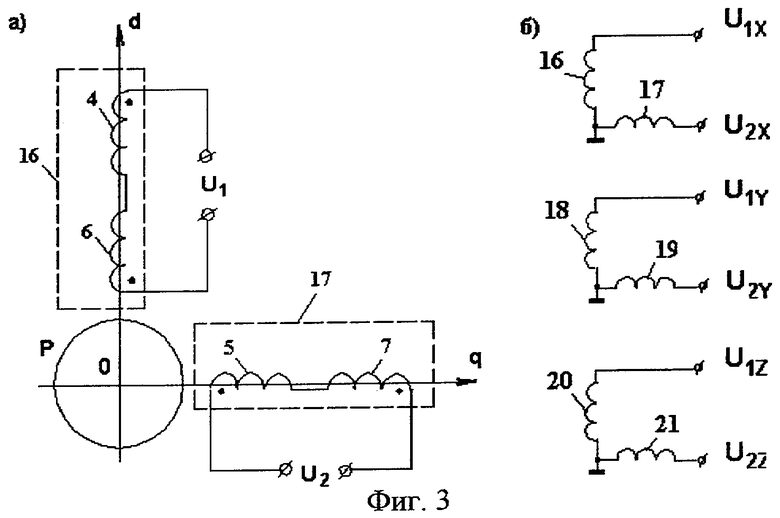
В статоре 1 (фиг.1, фиг.2, а) дуговые статоры 1.1 и 1.2 соединены между собой через спинки статоров 3.1 и 3.2. Статор 1 содержит силовые обмотки 4, 5, 6 и 7, расположенные попарно по взаимно-ортогональным осям d и q. Соосные диаметрально-противоположные обмотки 4 и 6, а также 5 и 7 объединены (фиг.3, а) в силовую обмотку 16 первой и силовую обмотку 17 второй фазы, соответственно.
В статоре 2 (фиг.2, б) дуговые статоры 2.1 и 2.2 соединены между собой через спинки статоров 1.1 и 1.2. Статор 2 содержит силовые обмотки 8, 9, 10 и 11, расположенные попарно по взаимно-ортогональным осям d и q. Соосные диаметрально-противоположные силовые обмотки 8 и 10, а также 9 и 11 объединены (аналогично фиг.3, а) в силовую обмотку 18 первой и силовую обмотку 19 второй фазы, соответственно.
В статоре 3 (фиг.2, в) дуговые статоры 3.1 и 3.2 соединены между собой через спинки статоров 2.1 и 2.2. Статор 3 содержит силовые обмотки 12, 13, 14 и 15, расположенные попарно по взаимно-ортогональным осям d и q. Соосные диаметрально-противоположные обмотки 12 и 14, а также 13 и 15 объединены (аналогично фиг.3, а) в силовую обмотку 20 первой и силовую обмотку 21 второй фазы, соответственно.
Электрическая схема ГМ-П приведена на фиг.3, б.
Работа ГМ-П основана на том, что при подаче напряжений U1 и U2 одинаковой частоты на ортогональные обмотки первой и второй фазы КС в нем, как в асинхронном двигателе, создается вращающий момент

где k - коэффициент пропорциональности, ϕ - фазовый сдвиг между U1 и U2.
Наиболее предпочтительным для постоянства результирующего вращающего момента МВР при любом положении ВКМ ротора в пространстве является фазовое управление, поэтому создаваемые в каждом КС моменты М определяются из соотношений
где ϕX, ϕY, ϕZ - фазовые сдвиги между одинаковыми по величине напряжениями U1 и U2 на двухфазных обмотках статоров КСX, КСY и KCZ.
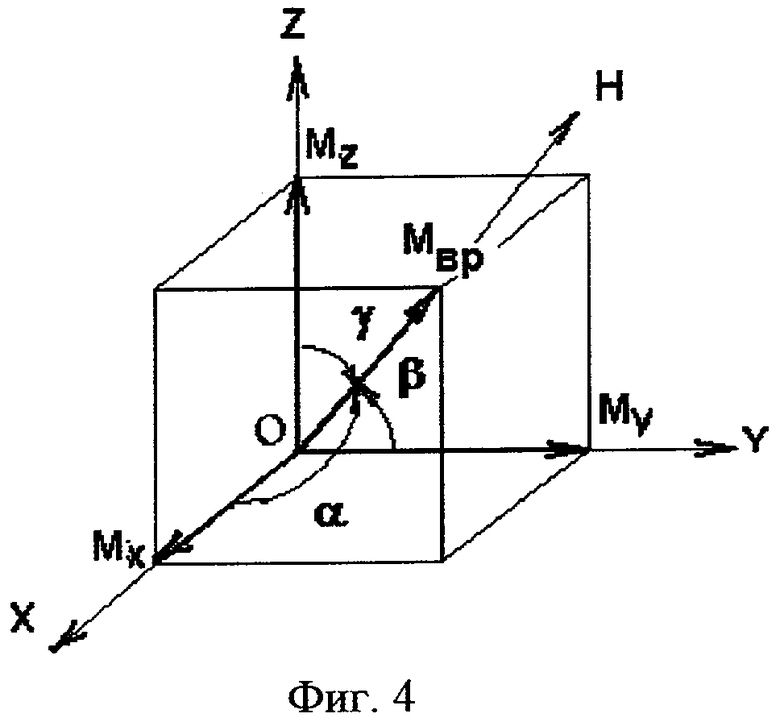
Вектор МХ статора 1 расположен по оси X, вектор МY статора 2 расположен по оси Y, вектор MZ статора 3 расположен по оси Z.
Для того чтобы результирующий момент МВР статора, а также ВКМ ротора, располагался под заданными углами α, β, γ в пространстве OXYZ (фиг.4), необходимо, чтобы вращающие моменты КС были связаны соотношениями

где α, β, γ - углы между вектором МВР и осями X, Y и Z, соответственно.
Из (2) и (3) следует, что должно быть

Таким образом, достоинством ГМ-П является то, что в нем обеспечена возможность установки ВКМ проводящего ротора в любое положение в пространстве, заданное углами α, β, γ. Недостатком ГМ-П является то, что при отклонении оси вращения ротора от оси КС к ротору прикладывается момент тяжения. В идеальном случае моменты тяжения от всех КС взаимно компенсируются, однако реально - они влияют на положение ВКМ ротора в пространстве.
Кроме того, недостатком ГМ-П является то, что при изменении его углового положения в пространстве возникают моменты тяжения, уводящие ВКМ ротора к новому положению вектора МВР.
Задачей предлагаемого изобретения является, во-первых, создание трехосного гиромотора (ТГМ) со сферическим электро- и магнитопроводящим ротором, в котором моменты тяжения имеют меньшие значения, чем в ГМ-П. Во-вторых, обеспечение постоянства заданного положения в пространстве ВКМ ротора при повороте статора.
Поставленная задача в предлагаемом ТГМ решена, во-первых, тем, что все дискретные КС ГМ-П превращены в кольцевые магнитопроводы (КМ) единого трехосного статора предлагаемого ТГМ, благодаря тому, что они соединены между собой внешней ферромагнитной оболочкой.
Во-вторых, благодаря тому, что в нем КМ с обмотками расположены на внутренней сферической оболочке, пропускающей магнитный поток, например композитной.
В-третьих, благодаря тому, что в нем на объединенных силовых обмотках одной фазы каждого магнитопровода построен автогенератор магнитного потока, содержащий преобразователи магнитного потока этой фазы в напряжение, например измерительные обмотки, расположенные вместе и соосно с каждой силовой обмоткой, соединенные между собой последовательно и подключенные к объединенным силовым обмоткам согласно через усилитель.
В-четвертых, благодаря тому, что в него введен многоканальный фазоизмеритель, содержащий фазовые детекторы по числу измерительных каналов в сочетаниях по два, входы которого подключены к одноименным (измерительным) выходам усилителей автогенераторов, а выходы через вычислитель подключены к информационному выходу ТГМ.
Сущность изобретения поясняется чертежами фиг.1 - фиг.12.
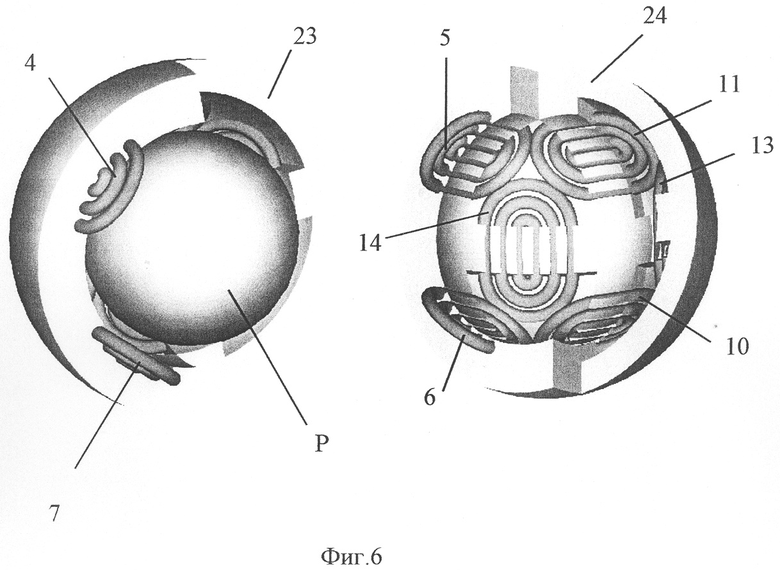
На фиг.1 изображен ГМ-П. На фиг.2 изображены КС ГМ-П. На фиг.3 приведены: а) схема соединения силовых обмоток, б) электрическая схема ГМ-П. На фиг.4 - векторная диаграмма моментов. На фиг.5 изображены: а) предлагаемый ТГМ, б) со вставками и в) ТГМ с дуговыми секторами с развитыми спинками. На фиг.6 изображен ТГМ с обмотками внутри внешней оболочки. На фиг.7 показана схема управления ТГМ с фазорегуляторами. На фиг.8 изображены: а) ТГМ с обмотками на внутренней сферической оболочке и б) ТГМ с внутренней оболочкой в разрезе. На фиг.9 приведены: а) схема соединения силовых и измерительных обмоток), б) схема АГМП, в) схема усилителя АГМП. На фиг.10 приведена схема ТГМ с АГМП в магнитопроводах: а) КМХ, б) КМY и в) KMZ. На фиг.11 - диаграмма моментов при повороте статора. На фиг.12 приведена схема измерения углов в предлагаемом ТГМ.
На фиг.1 - фиг.12 приняты следующие обозначения.
1, 2, 3 - кольцевые статоры КСХ, КСY, KCZ, соответственно;
1.1, 1.2, 2.1, 2.2, 3.1, 3.2 - дуговые статоры КС 1, 2 и 3;
1.1p, 1.2p, 2.1р, 2.2р, 3.1р, 3.2р - дуговые статоры с развитыми спинками;
4, 5, 6, 7 - силовые обмотки статора 1;
8, 9, 10, 11 - силовые обмотки статора 2;
12, 13, 14,15 - силовые обмотки статора 3;
16, 17 - силовые обмотки первой и второй фазы статора 1;
18, 19 - силовые обмотки первой и второй фазы статора 2;
20, 21 - силовые обмотки первой и второй фазы статора 3;
22 - сферические вставки;
23, 24 - полусферы внешней оболочки с обмотками;
25 - внутренняя сферическая оболочка;
26 - полусферы внешней оболочки без обмоток;
27, 28, 29, 30 - измерительные обмотки КМХ;
31, 32, 33, 34 - измерительные обмотки КМY;
35, 36, 37, 38 - измерительные обмотки KMZ;
39, 40 - измерительные обмотки первой и второй фазы КМХ;
41, 42 - измерительные обмотки первой и второй фазы КМY;
43, 44 - измерительные обмотки первой и второй фазы KMZ;
45 - усилитель АГМП;
46, 47 - АГМП первой и второй фазы КМХ;
48, 49 - АГМП первой и второй фазы КМY;
50, 51 - АГМП первой и второй фазы KMZ;
52...57 - измерительные выходы;
58 - Многоканальный фазоизмеритель, МКФИ; 1...6 - входы;
59 - Вычислитель;
60 - информационный выход;
Р - ротор;
OXYZ - система координат;
Г - генератор напряжения возбуждения;
УМ1, УМ2 - усилители мощности первой и второй фазы;
ФР - фазорегулятор;
Вх. - вход усилителя 45;
Вых.И - измерительный выход усилителя 45;
Вых.С - силовой выход усилителя 45;
U1, U2 - напряжения первой и второй фазы;
UВХ, UВЫХ - напряжение на входе и выходе ФР;
МВР - результирующий вращающий момент гиромотора;
МХ, MY, MZ - составляющие вектора МВР по осям X, Y, Z;
d, q - продольная и поперечная оси;
fВ - частота напряжения возбуждения;
ϕ - фазовый сдвиг;
Н - вектор кинетического момента, ВКМ;
α, β, γ - углы между осями координат и вектором МВР.
Конструкция ГМ-П описана выше и в патенте №2231756. В отличие от ГМ-П и в соответствии с п.1 Формулы изобретения в предлагаемом ТГМ все КМ соединены между собой внешней ферромагнитной оболочкой. В результате, в предлагаемом ТГМ дискретные КС ГМ-П становятся кольцевыми магнитопроводами, а дуговые статоры - дуговыми секторами, общего для них единого трехосного статора, который выполнен сплошным и сферическим. Выполнить предлагаемый ТГМ можно различными конструктивными средствами.
На фиг.5а изображен один из вариантов конструкции предлагаемого ТГМ, в котором внешняя ферромагнитная оболочка состоит из ферромагнитных сферических вставок 22 (фиг.5б), введенных между спинками КС ГМ-П. На фиг.5в изображен ТГМ, у которого внешняя ферромагнитная оболочка образована измененной (развитой) конфигурацией спинок дуговых секторов (например, 3.1р) (фиг.5г). Магнитопровод предлагаемого ТГМ выполнен из изотропного ферромагнитного материала, например из феррита, поэтому такая конфигурация спинки осуществима.
Преимуществом ТГМ (фиг.5а) по сравнению с ТГМ на фиг.5в является простота изготовления дуговых секторов и вставок. Преимуществом ТГМ на фиг.5в по сравнению с ТГМ на фиг.5а является меньшее количество соединяемых деталей, меньшее число и площадь стыков. Магнитное сопротивление стыков значительно меньше сопротивления воздушного зазора между статором и ротором, поэтому стыки не оказывают существенного влияния на работу ТГМ, однако усложняют сборку.
Еще меньшим количеством стыков и соединяемых деталей отличается конструкция ТГМ, изображенная на фиг.6. В этом ТГМ КМ с обмотками расположены в трех взаимно-ортогональных плоскостях на внутренней поверхности полусфер 23 и 24, образующих внешнюю ферромагнитную оболочку. В таком ТГМ уменьшено количество стыков не только между, но и внутри КМ, а внешняя оболочка (так же, как и на фиг.5) является ярмом общего статора для всех КМ. В ТГМ на фиг.6 части КМ объединены в новые более крупные группы, однако после соединения полусфер 23 и 24 трехосного статора обмотки остаются на тех же местах в пространстве OXYZ, что и в ГМ-П, т.е. сохраняется преемственность предлагаемого ТГМ с ГМ-П.
Электрическая схема предлагаемого ТГМ, соответствующего п.1 Формулы изобретения, изображена на фиг.3б.
Работа предлагаемого ТГМ по п.1 Формулы изобретения происходит после подключения к ТГМ (фиг.3б) схемы управления (фиг.7). Здесь генератор Г напряжения частоты fв возбуждения подключен к силовым обмоткам 16, 18 и 20 первой фазы всех КМ через усилители мощности УМ1X, УМ1Y и УМ1Z, а к обмоткам 17, 19 и 21 второй фазы всех KM - через фазорегуляторы ФРХ, ФРY и ФРZ и усилители УМ2Х, УМ2Y и УМ2Z. В фазорегуляторы введены углы α, β и γ положения в пространстве OXYZ BKM ротора, в результате чего напряжения UВЫХ Х, UВЫХ Y и UВЫХ Z фазорегуляторов сдвинуты по фазе относительно напряжения UВХ на углы, соответствующие (4).
При подаче электрических напряжений одинаковой частоты с заданным фазовым сдвигом на двухфазные силовые обмотки в каждом КМ создается вращающееся магнитное поле (ВМП). В отличие от ГМ-П в предлагаемом ТГМ статор выполнен сплошным сферическим, а не дискретным, поэтому в нем на общем сферическом магнитопроводе обеспечена возможность суммирования ВМП отдельных КМ. В результате, в предлагаемом ТГМ создается одно результирующее ВМП, вектор МВР которого расположен под заданными углами α, β и γ в пространстве OXYZ. В этом результирующем ВМП создается один вращающий момент МВР, под действием которого ротор начинает вращаться и его ВКМ устанавливается по оси ВМП, т.е. совпадает с вектором МВР.
Преимуществом предлагаемого ТГМ по сравнению с ГМ-П является то, что момент тяжения из отрицательного фактора становится положительным. Действительно, при отклонении ВКМ ротора от вектора МВР под действием момента тяжения движение ВКМ ротора к МВР будет происходить до тех пор, пока момент тяжения не обратится в нуль, а ВКМ ротора не совпадет с МВР.
Таким образом, в предлагаемом ТГМ обеспечивается достижение первой поставленной задачи: уменьшение моментов тяжения, приложенных к ротору, ось которого расположена в произвольном положении в пространстве.
Конструкция предлагаемого ТГМ, соответствующего п.2 Формулы изобретения, изображена на фиг.8а. Здесь обмотки КМ расположены в трех взаимно-ортогональных плоскостях на внутренней сферической оболочке 25, пропускающей магнитный поток. Оболочка 25 (фиг.8б) может быть выполнена из различных материалов, пропускающих магнитный поток, например из композитных материалов, а также из керамики, компаунда и т.п. В такой конструкции все КМ по наружной поверхности соединены между собой внешней ферромагнитной оболочкой, состоящей из двух полусфер 26 (фиг.8).
Достоинством предлагаемого ТГМ (фиг.8) является то, что в нем обмотки укладываются на сферическую поверхность сверху, например, между зубцами КМ, закрепленными во внутренней оболочке 25. Более простое исполнение, чем на фиг.6, имеет внешняя ферромагнитная оболочка в виде полусфер 26 без обмоток. Кроме того, при наличии внутренней оболочки в таком ТГМ улучшаются условия работы подвеса ротора.
Работа предлагаемого ТГМ, соответствующего п.2 Формулы изобретения, аналогична описанной выше для ТГМ (фиг.7).
От генератора Г через усилители УМ1X, УМ1Y и УМ1Z напряжение UBX частоты fВ поступает на силовые обмотки 16, 18 и 20 первой фазы, а через фазорегуляторы ФРХ, ФРY и ФРZ и усилители УМ2Х, УМ2Y и УМ2Z на силовые обмотки 17, 19 и 21 второй фазы всех КМ. В фазорегулятарах создаются фазовые сдвиги электрических напряжений UВЫХ Х, UВЫХ Y и UВЫХ Z относительно напряжения UBX в соответствии с (4). В результате, во всех КМ создаются ВМП, которые суммируются в одно ВМП на сплошном ярме магнитопровода статора, состоящем из полусфер 26. Магнитные потоки пронизывают внутреннюю оболочку 25 и приводят во вращение ротор Р. При отклонении ВКМ ротора от вектора МВР возникает момент тяжения, под действием которого ВКМ ротора будет изменять свое положение в пространстве до тех пор, пока не совпадет с вектором МВР. В этом положении момент тяжения обращается в нуль.
Таким образом, в новой конструкции предлагаемого ТГМ по п.п.1 и 2 Формулы изобретения поставленная задача (уменьшение моментов тяжения) достигнута реализацией новой, по сравнению с ГМ-П, функции: суммированием трех взаимно-ортогональных вращающихся магнитных полей на внешней ферромагнитной оболочке статора (а не моментов на роторе) с образованием результирующего ВМП, вектор МВР которого расположен под заданными углами α, β и γ в пространстве OXYZ. В установившемся состоянии, когда ВКМ ротора совпадает с вектором МВР, моменты тяжения в предлагаемом ТГМ обращаются в нуль.
Для решения второй поставленной задачи (обеспечения постоянства заданного положения в пространстве ВКМ ротора при повороте статора предлагаемого ТГМ) необходимо на объединенных силовых обмотках одной фазы каждого КМ построить автогенератор магнитного потока (АГМП). АГМП представляет собой замкнутую систему с положительной обратной связью, например автогенератор электрического напряжения, в котором имеется преобразование электрического напряжения в магнитный поток и магнитного потока в напряжение, причем магнитный поток является основной выходной величиной (см. например. Электромеханический фазовращатель. А.С. №1325662 кл. Н 03 h 11/20 от 26.10.83 г. и Устройство для преобразования угла поворота в электрический сигнал. А.С. №1292125, кл. Н 02 k 24/00 от 11.11.84 г.).
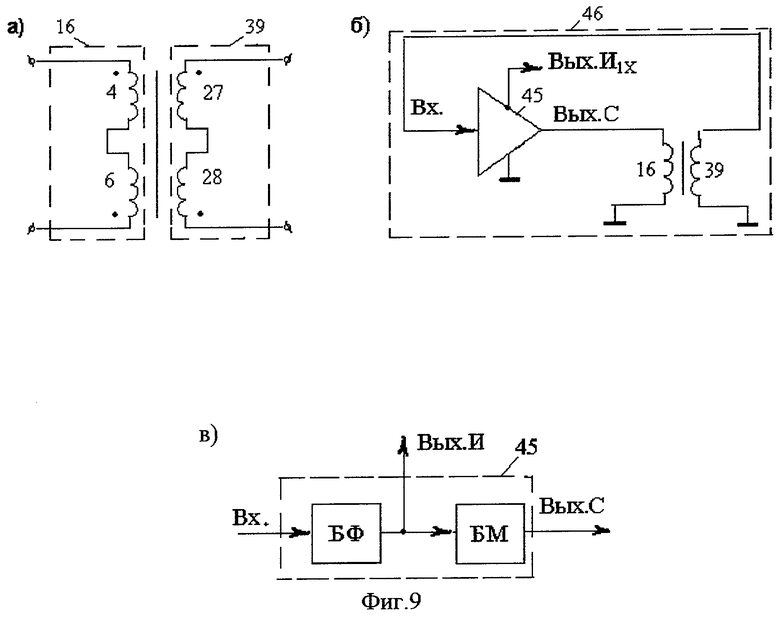
Для этого в предлагаемом ТГМ соосно и вместе с каждой силовой обмоткой одной фазы расположен преобразователь магнитного потока в напряжение (МП-Н) - измерительная обмотка. На фиг.9а показано, что соосные диаметрально-противоположные силовые обмотки 4 и 6, соединенные последовательно-встречно, образуют силовую обмотку 16 первой фазы. Расположенная соосно и вместе с обмоткой 4 (в тех же пазах) измерительная обмотка 27 соединена последовательно с измерительной обмоткой 28, расположенной вместе (в тех же пазах) с обмоткой 6. Обмотки 27 и 28 соединены в измерительную обмотку 39 первой фазы для обеспечения преобразования магнитного потока по оси d в напряжение.
Аналогично расположены силовые и измерительные обмотки по осям d и q всех КМ. Теперь для построения АГМП необходимо подсоединить (фиг.9б) измерительную обмотку 39 к силовой обмотке 16 согласно, т.е. с положительной обратной связью, через усилитель 45. Структура усилителя 45 предлагаемого ТГМ, приведенная на фиг.9в, обусловлена необходимостью возбуждения в каждом АГМП синусоидальных колебаний. Для этого усилитель содержит Блок фильтров (БФ) и Блок мощности (БМ). Вход усилителя подключен к входу блока БФ, выход которого подключен к измерительному выходу Вых.И усилителя непосредственно, а к силовому выходу Вых.С - через блок БМ. В блоке БФ сигнал преобразователя МП-Н (измерительной обмотки) выделяется из помех, а в блоке БМ обеспечивается мощность, необходимая для создания в каждом КМ магнитных потоков и, соответственно, момента МВР требуемого уровня. Для возбуждения автоколебаний необходимо, чтобы при равном числе витков обмоток 16 и 39 коэффициент усиления усилителя 45 по напряжению UВЫХ/UBX=КУ≥1.
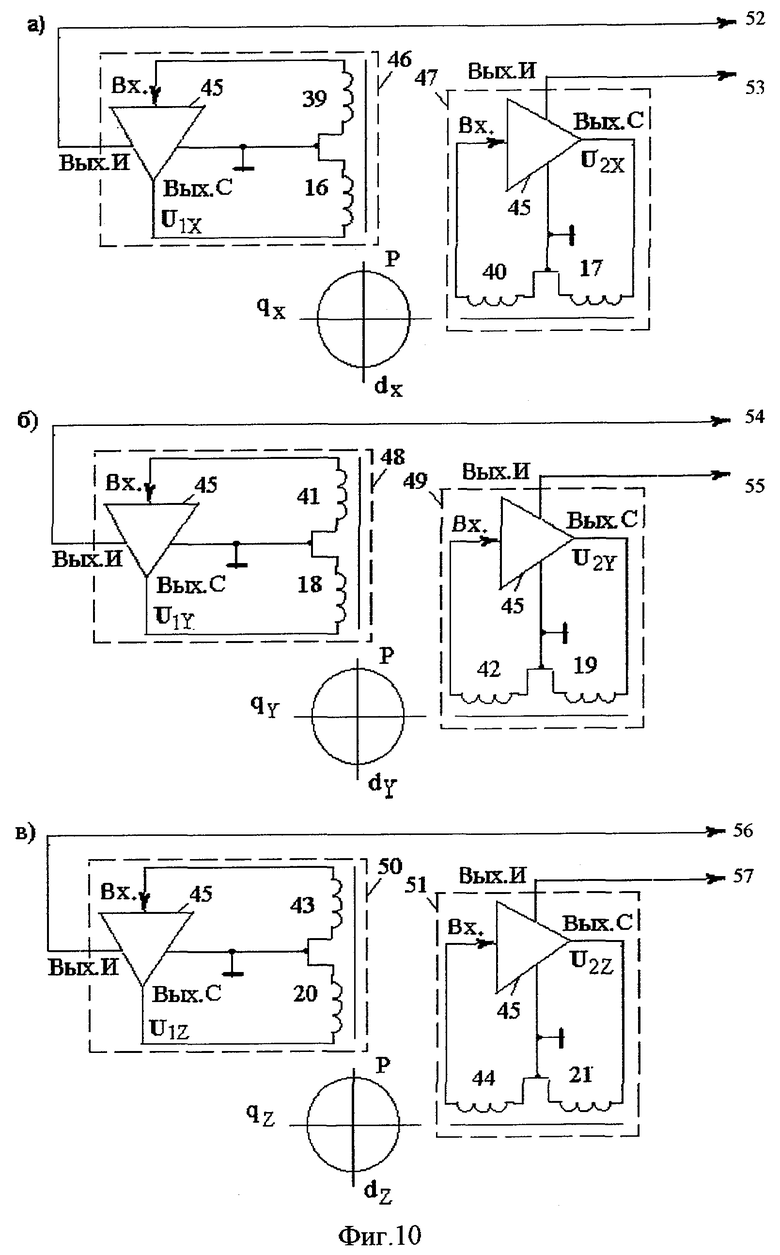
В связи с тем, что АГМП построены на силовых обмотках одной фазы всех КМ, электрическая схема предлагаемого ТГМ, соответствующего п.3 Формулы изобретения, приобретает вид, показанный на фиг.10. Здесь измерительные обмотки 39 и 40 (фиг.10а) подключены к силовым обмоткам 16 и 17 через усилители 45 согласно, т.е. с положительной обратной связью, в результате чего по осям dX и qX магнитопровода КМХ построены АГМП 46 первой и АГМП 47 второй фазы. На фиг.10б показано, что подключением измерительных обмоток 41 и 42 к силовым обмоткам 18 и 19 согласно через усилители 45 в магнитопроводе КМY построены по осям dY и qY АГМП 48 первой и АГМП 49 второй фазы. На фиг.10в показано, что подключением измерительных обмоток 43 и 44 к силовым обмоткам 20 и 21 согласно через усилители 45 в магнитопроводе KMZ построены по осям dZ и qZ АГМП 50 первой и АГМП 51 второй фазы.
Работа предлагаемого ТГМ, соответствующего п.3 Формулы изобретения, основана на том, что в каждом КМ (при независимом от АГМП других КМ включении) так же, как и в других устройствах с автовозбужденным ВМП, происходит синхронизация АГМП первой и второй фазы с образованием кругового ВМП (см. например, Воскобойников Р.Л., Фабрикант Е.А. Взаимодействие автономных автовозбужденных электромагнитных полей в замкнутых ферромагнитных средах. / Системы управления, следящие приводы и их элементы. - М.: ЦНИИТЭИ, 1989, а также Воскобойников Р.Л. Механизм синхронизации независимых автовозбужденных электромагнитных потоков, ортогонально расположенных в электрической машине. Гироскопия и навигация. - 2004. - №1. - с.40-44).
Под действием автовозбужденного ВМП любого из КМ ротор предлагаемого ТГМ разгоняется до частоты вращения, близкой к номинальной, частота АГМП оказывается близкой к частоте fВ, a фазовый сдвиг между АГМП первой и второй фазы сохраняется при разгоне равным 90°. По окончании переходного процесса ВКМ ротора устанавливается по оси КМ. Близость частот АГМП при автономном включении обусловлена тем, что все усилители, обмотки и напряжения в КМ предлагаемого ТГМ одинаковы, т.е. все характеристики и, соответственно, собственные частоты очень близки.
Установим теперь ВКМ ротора в исходное положение в пространстве. Сделать это можно различными способами, например, с помощью схемы (фиг.7) так, как описана работа ТГМ выше, а затем переключить обмотки в схему фиг.10. Сущность процессов в предлагаемом ТГМ по п.3 Формулы изобретения не зависит от способа установки ВКМ ротора в первоначальное (исходное) положение, однако проще это сделать следующим образом.
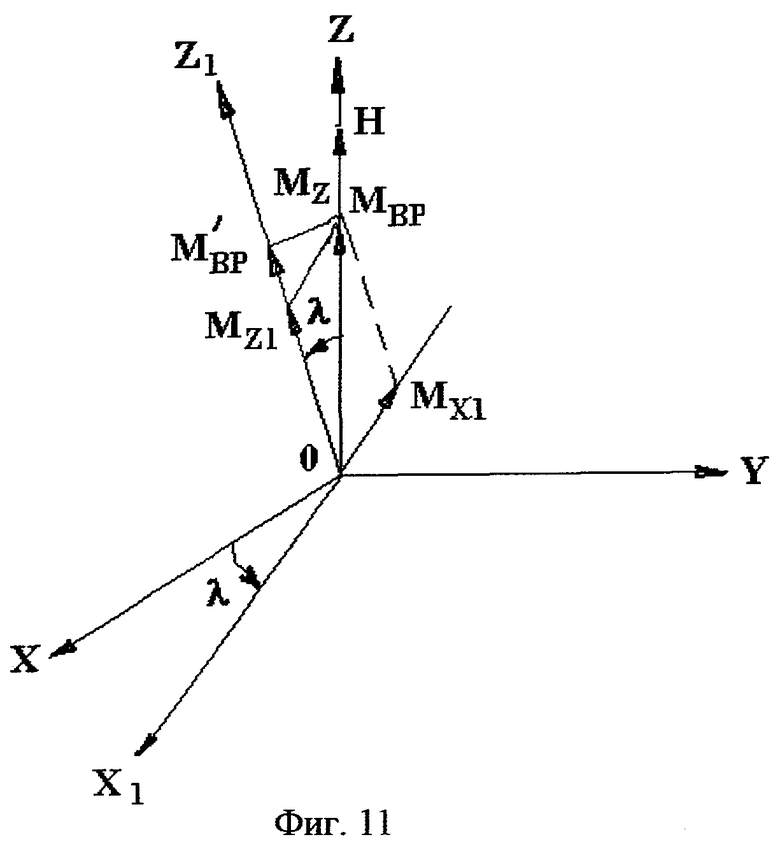
Установим ВКМ ротора в системе OXYZ (фиг.11) по оси Z. Для этого необходимо подать напряжение питания на усилители 45 АГМП 50 и 51 схемы фиг.10в. При необходимости ВКМ ротора удобно устанавливать аналогично по оси Х или Y подачей питания на схему фиг.10а или фиг.10б, соответственно.
Под действием АГМП 50 и 51 (фиг.10), возбуждающих (нагнетающих) ортогональные магнитные потоки, в магнитопроводе KMZ возникает автовозбужденное ВМП, частота которого увеличивается вместе с увеличением частоты вращения ротора при разгоне из неподвижного состояния при постоянном фазовом сдвиге, равном 90°. При номинальной частоте вращения ротора частота синхронизированных АГМП 50 и 51 близка к fВ. По окончании переходного процесса ВКМ ротора Н (фиг.11) устанавливается по оси Z и совпадает с вектором MZ=МВР. В этом установившемся состоянии ТГМ момент тяжения равен нулю.
Подадим питание на усилители 45 в схемах фиг.10а и фиг.10б, т.е. теперь предлагаемый ТГМ по п.3 Формулы изобретения полностью включен. В КМХ начинают функционировать АГМП 46 и 47, а в КМY - АГМП 48 и 49, возбуждающие свои магнитные потоки. В результате, в связи с тем, что в предлагаемом ТГМ магнитопроводы КМХ, КМY и KMZ связаны между собой внешней ферромагнитной оболочкой произойдет синхронизация всех АГМП: у них установится одинаковая частота автоколебаний, близкая к fВ, а между АГМП установятся взаимообусловленные фазовые сдвиги (см. например, Блехман И.И. Синхронизация динамических систем. М.: Наука. 1971, 896 с. Введение §3, п.3 в том числе: с.33 п.п. б), в) и г), а также с.44 абз.2 сверху).
Так как ВКМ ротора расположен по оси Z, то АГМП 50, 51 в KMz синхронизируются с частотой fВ, соответствующей частоте вращения ротора, и с фазовым сдвигом ϕZ=90°. В магнитопроводах КМХ и КМY ВКМ ротора расположен ортогонально осям КМ, поэтому АГМП 46, 47, 48 и 49 синхронизируются на той же частоте, что и АГМП в KMZ, но с фазовыми сдвигами ϕХ=0 (в КМХ) и ϕY=0 (в КМY), т.е. они не создают ВМП. В результате, момент МВР=МZ, он совпадает с ВКМ ротора, все АГМП синхронизированы и весь предлагаемый ТГМ находится в устойчивом состоянии. При любых других фазовых сдвигах в предлагаемом ТГМ (фиг.10) между ВКМ ротора и вектором МВР возникнет рассогласование и момент тяжения, т.е. возмущающее воздействие (см. монографию И.И.Блехмана), под действием которого фазовые сдвиги изменятся и примут необходимые, указанные выше значения, при которых возмущающее воздействие обращается в нуль.
Повернем теперь статор предлагаемого ТГМ на угол λ против часовой стрелки вокруг оси Y (фиг.11) в положение OX1YZ1 и предположим, что вектор  повернулся вместе со статором на этот же угол в положение
повернулся вместе со статором на этот же угол в положение  В этом случае между моментом
В этом случае между моментом  и ВКМ ротора возникнет момент тяжения и изменятся моменты нагрузки по осям: по оси Z1 момент уменьшится, по оси X1 момент увеличится и станет равным -МХ, по оси Y нагрузка не изменится. В результате, в каждом КМ, как и в известных асинхронных двигателях, при уменьшении момента нагрузки частота вращения ротора увеличится, а при увеличении нагрузки - уменьшится. В предлагаемом ТГМ с автовозбужденными ВМП (в дополнение к сказанному у И.И.Блехмана) одновременно с изменением частоты вращения ротора изменяются частоты АГМП: в KMZ частота начнет увеличиваться, а в КМХ - уменьшаться. Однако практически никаких изменений частот в предлагаемом ТГМ (фиг.10) не произойдет. Изменение частоты Δf связано с фазовым сдвигом ϕ соотношением
и ВКМ ротора возникнет момент тяжения и изменятся моменты нагрузки по осям: по оси Z1 момент уменьшится, по оси X1 момент увеличится и станет равным -МХ, по оси Y нагрузка не изменится. В результате, в каждом КМ, как и в известных асинхронных двигателях, при уменьшении момента нагрузки частота вращения ротора увеличится, а при увеличении нагрузки - уменьшится. В предлагаемом ТГМ с автовозбужденными ВМП (в дополнение к сказанному у И.И.Блехмана) одновременно с изменением частоты вращения ротора изменяются частоты АГМП: в KMZ частота начнет увеличиваться, а в КМХ - уменьшаться. Однако практически никаких изменений частот в предлагаемом ТГМ (фиг.10) не произойдет. Изменение частоты Δf связано с фазовым сдвигом ϕ соотношением

Отсюда следует, что при любом, сколь угодно малом изменении частоты прежде всего начнет изменяться фазовый сдвиг ϕ между АГМП, а вместе с ним - составляющие момента МВР по осям. Благодаря связи по общему ярму (внешней сферической оболочке) изменения затронут все АГМП, даже в КМY. Изменения прекратятся, когда при Δf=0 фазовые сдвиги примут новые установившиеся значения ϕ=ϕ0, при которых возмущающее воздействие (момент тяжения) обращается в нуль. Так как фазовые сдвиги между АГМП изменяются во много раз быстрее, чем поворачивается ВКМ ротора, то при повороте статора ВКМ ротора сохранит свое прежнее положение в пространстве и величину, а момент МВР повернется и вновь совпадет с ВКМ ротора по направлению в пространстве.
В связи с тем, что вместе со статором вся система координат повернулась в положение OX1YZ1 на угол λ, положение ВКМ ротора в пространстве и положение вектора МВР характеризуются теперь новыми фазовыми сдвигами: ϕX=-λ, ϕY=0, ϕZ=90°+λ.
Здесь учтены сразу три случая: уменьшение момента нагрузки (по оси Z), увеличение момента нагрузки с изменением знака (по оси X) и сохранение состояния (по оси Y). Аналогично происходит работа предлагаемого ТГМ, соответствующего п.3 Формулы изобретения, при других углах поворота статора.
Таким образом, решена вторая поставленная задача: при изменении углового положения статора предлагаемого ТГМ ВКМ ротора сохраняет свое положение в пространстве, в связи с тем, что благодаря АГМП, построенным на силовых обмотках одной фазы каждого КМ, при повороте статора изменяются фазовые сдвиги между магнитными потоками и, соответственно, составляющие момента МВР по осям так, что результирующий вектор МВР не отклоняется от ВКМ ротора.
Из вышесказанного также следует, что в предлагаемом ТГМ обеспечивается еще одно важное свойство: фазовые сдвиги между процессами в АГМП, расположенными в трех взаимно-ортогональных магнитопроводах КМХ, КМY и KMZ, характеризуют взаимное положение ВКМ ротора и координатной системы OXYZ статора. По измеренным фазовым сдвигам удобно определять не только положение ротора в пространстве, но и изменение положения статора по сравнению с первоначальным (исходным).
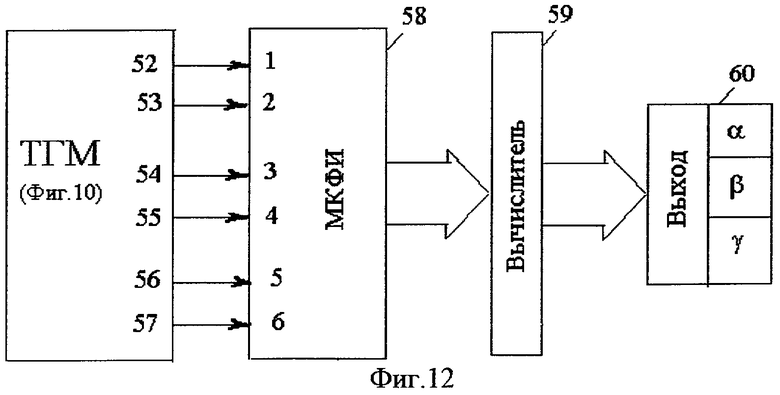
Для этого необходимо с помощью многоканального фазоизмерителя (МКФИ) 58 (фиг.12) измерить фазовые сдвиги между одноименными электрическими напряжениями АГМП, по которым определить (вычислить) угловое положение ВКМ ротора в заданной системе координат. В предлагаемом ТГМ входы 1...6 МКФИ 58 (фиг.12) подключены к одноименным, например, измерительным выходам 52...57 усилителей 45 (фиг.10).
Измерение фазовых сдвигов между электрическими напряжениями осуществляется с помощью фазовых детекторов (ФД), поэтому МКФИ 58 содержит необходимое количество ФД, обеспечивающих измерение фазовых сдвигов между двумя каналами из шести в различных сочетаниях. Количество ФД может быть уменьшено, если использовать для одного ФД мультиплексный, т.е. переключающий режим.
Выходы МКФИ 58 (фиг.12) подключены к Вычислителю 59, в котором определяются угловые координаты ВКМ ротора в заданной системе координат. Если заданная система координат совпадает с осями X, Y и Z предлагаемого ТГМ, то углы α, β и γ вычисляются из соотношений (4). Если учесть, что фазовые сдвиги ϕХ, ϕY, ϕZ характеризуют (2, 4) угол подъема вектора МВР над плоскостью магнитопроводов КМХ, КМY И KMZ, соответственно, то по измеренным значениям фазовых сдвигов удобно вычислять координаты ВКМ ротора в другой заданной системе координат, например в сферической.
Выходы Вычислителя 59 подключены (фиг.12) к информационному выходу 60 предлагаемого ТГМ. В дальнейшем значения углов могут отображаться на табло (мониторе) и (или) передаваться (транслироваться) в другие устройства.
Работа предлагаемого ТГМ (фиг.12), соответствующего п.4 Формулы изобретения, осуществляется следующим образом. Электрические напряжения с измерительных выходов 52...57 усилителей 45 поступают на входы 1-6 фазоизмерителя МКФИ 58, в котором с помощью ФД осуществляется измерение фазовых сдвигов между этими напряжениями. Полученные значения фазовых сдвигов, преобразованные, например, в цифровую форму, поступают в Вычислитель 59, в котором осуществляется математическая обработка результатов измерений и вычисление координат ВКМ ротора в заданной системе координат. В нашем случае - это вычисление по (4) углов α, β и γ. Результаты вычислений поступают на информационный выход 60 предлагаемого ТГМ.
Таким образом, в предлагаемом ТГМ поставленная задача решена полностью.
Во-первых, обеспечено (по сравнению с ГМ-П) уменьшение моментов тяжения при любом положении ВКМ ротора в пространстве, благодаря тому, что все КМ соединены между собой внешней ферромагнитной оболочкой, в которой функционирует одно ВМП, образованное тремя взаимно-ортогональными КМ.
Во-вторых, в предлагаемом ТГМ (в отличие от ГМ-П) обеспечено, что ВКМ ротора сохраняет первоначально установленное положение в пространстве при любых углах поворота статора. Это существенное преимущество предлагаемого ТГМ перед ГМ-П достигнуто благодаря тому, что на силовых обмотках одной фазы каждого КМ построен автономный АГМП, содержащий преобразователи магнитного потока этой фазы в напряжение - измерительные обмотки, подключенные к силовым обмоткам этой фазы согласно через усилитель. В связи с тем, что АГМП возбуждают исходно-независимые магнитные потоки, взаимодействующие по внешней ферромагнитной оболочке, их синхронизация по частоте при строго определенных фазовых сдвигах обусловлена только положением вектора МВР и ВКМ ротора в пространстве. При отклонении результирующего момента МВР от ВКМ ротора возникает момент тяжения, под действием которого фазовые сдвиги между АГМП автоматически изменяются так, чтобы устранить это рассогласование и привести всю систему АГМП в новое состояние с новым сочетанием фазовых сдвигов, при котором вектор МВР будет совпадать с ВКМ ротора. В результате ВКМ ротора при любых углах поворота статора ТГМ сохраняет без кардановых колец первоначально установленное положение в пространстве.
Кроме того, в предлагаемом ТГМ реализовано еще одно важное преимущество перед известными ГМ: обеспечена возможность измерения положения в пространстве ВКМ ротора, а также положения статора в пространстве по сравнению с первоначально установленным. Такое преимущество обеспечено введением в предлагаемый ТГМ многоканального фазоизмерителя, с помощью фазовых детекторов которого осуществляется измерение фазовых сдвигов между одноименными напряжениями всех АГМП (например, между напряжениями на измерительных выходах усилителей). После обработки результатов измерений в Вычислителе угловые координаты поступают (например, в цифровом виде) на информационный выход предлагаемого ТГМ. Это удобно для последующей визуализации и (или) трансляции угловых координат ВКМ ротора в другие устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОМОТОР ШАРОВОГО ГИРОСКОПА | 2002 |
|
RU2231756C1 |
| Электромеханический фазовращатель | 1983 |
|
SU1325662A1 |
| Бесконтактный электромеханический преобразователь | 1985 |
|
SU1312697A1 |
| Устройство для преобразования угла поворота в электрический сигнал | 1984 |
|
SU1292125A1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Вращающийся трансформатор | 1971 |
|
SU457149A1 |
| Бесконтактный вращающийся трансформатор | 1970 |
|
SU780108A1 |
| Тахогенератор переменного тока | 1977 |
|
SU645083A1 |
| Способ функционального преобразования механического перемещения объекта в электрическое напряжение | 1978 |
|
SU748124A1 |




Изобретение относится к гироскопическим устройствам и может быть применено в тех областях, где необходимо обеспечить не только вращение сферического электро- и магнитопроводящего ротора вокруг оси, расположенной в любом заданном положении в пространстве, но и измерение этого положения. В изобретении моменты тяжения уменьшены благодаря тому, что все дискретные кольцевые статоры соединены между собой внешней ферромагнитной оболочкой, в результате чего они превращены в кольцевые магнитопроводы единого трехосного статора. Конструкция внешней оболочки может быть упрощена, если кольцевые магнитопроводы с обмотками расположить на внутренней сферической оболочке, пропускающей магнитный поток, выполненной, например, из композитного материала. В результате обеспечена реализация новой функции: суммирование трех взаимно-ортогональных вращающихся магнитных полей на внешней ферромагнитной оболочке статора с образованием результирующего вектора кинетического момента, расположенного под заданными углами в пространстве. В установившемся режиме, когда вектор кинетического момента ротора совпадает с вектором результирующего момента вращения, моменты тяжения обращаются в нуль. Постоянство положения в пространстве вектора кинетического момента ротора при повороте статора обеспечено благодаря тому, что на объединенных обмотках одной фазы каждого кольцевого магнитопровода построен автогенератор магнитного потока. Гиромотор снабжен также функцией измерения пространственных углов. 3 з.п. ф-лы, 12 ил.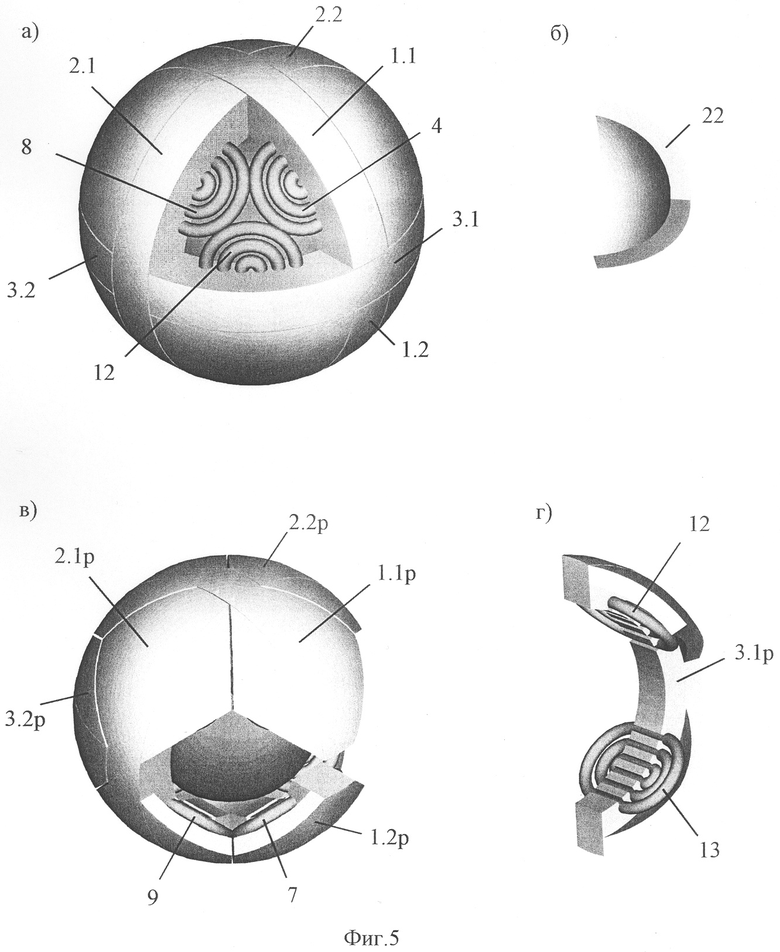
| ГИРОМОТОР ШАРОВОГО ГИРОСКОПА | 2002 |
|
RU2231756C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Электромагнитный подвес | 1977 |
|
SU709950A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| US 5476028 A, 19.12.1995 | |||
| RU 95117027 A, 20.10.1997. | |||

