Область техники
Изобретение относится к области приборостроения и может быть использовано в системах ориентации и навигации подвижных объектов (самолет, корабль, автомобиль), в инклинометрах (для подземной навигации) и других устройствах, где требуется информация об угловых скоростях, получаемая с помощью микромеханического гироскопа.
Предшествующий уровень техники.
В настоящее время предложены и используются различные конструкции вибрационных микромеханических гироскопов. Принцип действия этих гироскопов основан на использовании инерционной массы в упругом подвесе, которая приводится, например, в колебательное движение. При вращении такой системы по оси, перпендикулярной оси колебаний, на массу действует сила Кориолиса, создающая момент, ортогональный оси колебаний и оси вращения системы, приводящий к угловым смещениям массы, пропорциональным угловой скорости вращения системы. Например, известна конструкция микромеханического гироскопа по патенту США №5535902 с чувствительным элементом в виде кольца, закрепленного с помощью растяжек на центральной стойке, связанной с корпусом через упругие элементы. С помощью электростатических датчиков силы кольцо приводится в колебательное движение вокруг оси растяжек. Для съема информации используется емкостный преобразователь. Недостатком подобных микромеханических гироскопов является недостаточно высокая точность из-за малой величины кинетического момента ввиду того, что их роторы совершают не вращательное, а колебательные движения. В силу этого амплитудное значение кинетического момента роторов составляет величину 10-8-10-9 нм· сек. Поэтому повышение точности этого класса гироскопов достигается за счет снижения возмущающих воздействий, а осуществление этой меры требует больших конструктивных и технологических затрат.
Известен микромеханический гироскоп по патенту РФ №2158903, 2000 г., в котором дисковый миниротор (с диаметром 8 мм) совершает непрерывное вращательное движение в неконтактном (электростатическом) подвесе. Преимуществом такого устройства является возможность обеспечения при сравнимых с вибрационными гироскопами размерах значительно большей (на несколько порядков) величины кинетического момента, благодаря чему предоставляется возможность существенного повышения точности микрогироскопа. Однако недостатками этого гироскопа являются сложность конструкции (зазоры между ротором и электродами порядка нескольких микрометров), необходимость поддержания высокого вакуума на уровне (10-6 - 10-7) мм рт. ст., низкая перегрузочная способность - не более 5 g.
За прототип принят магнитосферический гироскоп по патенту РФ №2126135, 1999 г., содержащий полый ферромагнитный сферический ротор, двухкоординатные датчики угла и момента, верхний и нижний статоры подвеса ротора с электромагнитными обмотками, резонансные конденсаторы и диодные демпфирующие мосты, последовательно соединенные с электромагнитными обмотками, статор электродвигателя, взаимодействующий с экваториальным токопроводящим пояском на сферической поверхности ротора.
Недостатками прототипа являются:
- сложность конструкции из-за применения двух датчиков угла и момента на полюсах ротора со специальной полостью, что затрудняет миниатюризацию гироскопа,
снижение перегрузочной способности ввиду малого использования поверхности ротора относительно площади тяговых электромагнитов статоров подвеса,
- обкат ротора (способный вызвать разрушение гироскопа) при аварийном отключении питания статоров подвеса или действии внешнего ускорения, приводящего к контакту вращающегося ротора со статорами подвеса или специальными ограничителями смещения ротора.
Сущность изобретения
Технический результат изобретения заключается в упрощении конструкции электромагнитного гироскопа, позволяющей осуществить его миниатюризацию, повысить перегрузочную способность и предотвратить аварийный обкат ротора при внешних возмущениях, превышающих заданные значения. Технический результат достигается тем, что в гироскоп, содержащий ферромагнитный ротор, верхний и нижний статоры электромагнитного подвеса ротора, введен центральный статор подвеса с цилиндрической рабочей поверхностью, ротор выполнен в виде кольца со сферической наружной и цилиндрической внутренней поверхностями, а статор вращения ротора выполнен обращенным и помещен внутри кольца ротора. Кольцо ротора может быть выполнено с шириной В, удовлетворяющей условию А>В>С, где А - толщина пакета из трех статоров, С - толщина центрального статора, и внутренней цилиндрической частью из электропроводящего материала. Статор вращения ротора установлен на упругой опоре, например, в виде гибкого стержня.
Перечень фигур
На фиг. 1 представлена конструкция гироскопа (а - вид в плане с видимыми скрытыми линиями, б - сечение по оси симметрии верхнего и нижнего статоров подвеса, в - сечение по оси симметрии центрального статора подвеса.
На фиг. 2 показано взаимное расположение трех статоров подвеса с катушками (обмотками) на зубцах магнитопроводов.
На фиг. 3 дан вид кольца ротора с внутренним электропроводящим покрытием.
На фиг. 4 показана электрическая блок-схема для подвеса ротора центральным статором.
На фиг. 5 представлена электрическая блок-схема подвеса и определения углового положения ротора с помощью боковых (верхнего и нижнего) статоров.
На фиг. 1-5 приняты следующие обозначения:
1 - ротор,
2 - нижний статор подвеса,
3 - верхний статор подвеса,
4 - центральный статор подвеса,
5 - статор вращения ротора,
6 - корпус,
7 - крышка,
8 - упругий стержень,
9 - ферромагнитная часть ротора,
10 - электропроводящая часть ротора,
11-14 - конденсаторы,
15-16 - демпфирующие устройства,
17 - фазоинвертор,
18 - источник переменного напряжения,
19 - трансформатор тока,
20 - усилитель,
21-22 - резисторы делителя,
23-24 - устройства вычитания.
Предложенный электромагнитный гироскоп содержит (фиг. 1) ферромагнитный ротор 1 в виде кольца со сферической наружной и цилиндрической внутренней поверхностями, центральный статор 4 электромагнитного подвеса ротора с цилиндрической рабочей поверхностью, нижний 2 и верхний 3 (боковые) статоры подвеса ротора, обращенный статор 5 вращения ротора, помещенный внутри кольца ротора и установленный на упругой опоре в виде стержня 8. Устройство помещено в герметичный (вакуумированный) корпус 6 с крышкой 7 с выводами от катушек (обмоток) статоров подвеса и вращения ротора. Магнитопроводы всех статоров могут быть выполнены шихтованными из тонких пластин (с толщиной до 10 микрометров) из магнитомягкого материала с высоким значением максимальной индукции (например, из перминдюра или перминвара) или из феррита силовых марок. Кольцо ротора 1 (фиг. 1) может быть выполнено либо с шириной В, превышающей толщину А пакета магнитопроводов из трех статоров, для реализации работы гироскопа в свободном режиме в ограниченном диапазоне углов отклонения корпуса гироскопа, определяемом величиной В-А (при этом положение вектора кинетического момента ротора определяется, например, благодаря динамическому дебалансу ротора - патент РФ №2065134), либо ширина кольца В удовлетворяет условию А>В>С, где С - толщина центрального статора, для работы гироскопа в упрощенном варианте (для использования боковых статоров подвеса в качестве датчиков углового положения вращающегося ротора).
Магнитопроводы (фиг. 2) всех статоров подвеса выполнены четырехзубцовыми с катушками (обмотками) к1 - к12. Центральный статор 4 смещен относительно оси Z на угол 45° для того, чтобы минимизировать величину А благодаря размещению лобовых частей его катушек между лобовыми частями катушек боковых статоров 2 и 3. Рабочие поверхности боковых статоров могут быть выполнены либо сферическими (концентрично с внешней поверхностью кольца ротора) либо конусными, аппроксимирующими сферу, для упрощения изготовления при очень малом (несколько миллиметров) диаметре ротора.
Внутренняя цилиндрическая часть 10 ферромагнитного ротора (фиг. 3) может быть выполнена из электропроводящего материала. Ферромагнитная часть 9 выполняется либо шихтованной либо из силового феррита. При выполнении ротора из феррита проводящая часть выполняется напылением материала. Статор 5 (фиг. 1) вращения ротора установлен на упругой опоре, например, в виде гибкого стержня 8.
Гироскоп устанавливается на плате с электронными блоками, в состав которых входит блок управления подвесом для центрального статора (фиг. 4) и блок управления подвесом ротора и определения его углового положения для боковых статоров (фиг. 5). Блок на фиг. 4 содержит пары диаметрально противоположно расположенных катушек к1 - к3 и к2 - к4, которые соответственно через резонансные конденсаторы 11-12 и 13-14 подключены к фазоинвертору 17, который преобразует переменное напряжение источника 18 в напряжение с нулевой фазой (выход и1) и второе напряжение с фазой 180° (выход и 2). Относительно общей точки фазоинвертора подключены демпфирующие элементы 15 и 16 по патенту РФ №2193122 «Демпфер для электромеханических устройств переменного тока». Блок на фиг. 5 содержит пары зеркально противоположно расположенных катушек боковых статоров к5-к9 - к7-к11, к6-к10 - к8-к12 (фиг. 2) и четыре идентичные ячейки я1 - я4, в состав каждой из которых входят трансформатор тока 19, усилитель 20 и делитель выходного напряжения усилителя на резисторах 21 и 22 (по авторской заявке РФ №2009141906 «Способ центрирования ферромагнитного тела»).
Предложенный гироскоп работает следующим образом. При включении электронных блоков (фиг. 4 и фиг. 5) ротор взвешивается в магнитном поле статоров. При этом центральный статор 4 (фиг. 2) благодаря цилиндрической рабочей поверхности зубцов магнитопровода обеспечивает не только устойчивый подвес ротора в плоскости XOY, но и в направлении оси Z. Боковые статоры 3 и 4 обеспечивают дополнительную жесткость подвеса по оси Z и служат для определения углового положения вращающегося ротора. Подключение обмоток статора вращения 5 к многофазному (например, двухфазному) источнику напряжения приводит к взаимодействию вращающегося магнитного поля статора с внутренней проводящей поверхностью ротора 1, т.е. к его вращению по принципу асинхронного двигателя. Поступательные и угловые смещения ротора, например, для катушек статора 2 (фиг. 2) к5-к9 и катушек статора 3 к7-к11 определяются следующими значениями токов:

где I0 - величина опорного тока,
Δх, Δz - относительные смещения ротора по осям X и Z,
Δβ - угловое смещение ротора относительно оси Y,



При этом выходное напряжение усилителя 20 (ячейка я1) будет:
Uя1=Ку(Iк5-Iк9)=2КуI0(-Δz+Δβ), Ку - коэффициент усиления,
а выходное напряжение усилителя ячейки я2 будет:
Uя2=Ку(I73-I74)=2КуI0(-Δz-Δβ),
т.е. содержит составляющие управления подвесом по оси Z и составляющие углового смещения ротора, создающие момент сопротивления повороту ротора. Разность выходных напряжений ячеек я1 и я2 (получаемая с помощью устройства вычитания 23) будет: Uя1-Uя2=U(β)=4КуI0Δβ, т.е. пропорциональна угловому смещению ротора относительно оси Y. Аналогично с устройства вычитания 24 получаем информацию об угле 
При включении в ячейки я1-я4 схемы фиг. 5 диагонально противоположно расположенных пар катушек, соответственно к5-к11, к7-к9, к6-к12, к8-к10, на выходах усилителей будут напряжения, обеспечивающие жесткость подвеса по всем осям X.Y.Z, при этом подвес ротора не обладает угловой жесткостью. Информация об угловом положении ротора в этом случае может быть использована в схеме управления его положением по принципу «датчик угла - усилитель - датчик момента» при использовании в качестве датчиков момента катушек боковых статоров подвеса ротора, например, в соответствии с патентом РФ №2209393 «Совмещенный датчик момента и смещения тела».
Следует отметить, что предложенный гироскоп может дополнительно служить (как в прототипе) в качестве трехкомпонентного акселерометра при измерении поступательных смещений Δх, Δу, Δz, вызванных составляющими вектора ускорения силы тяжести и ускорениями при движении корпуса.
Проблема возникновения обката при аварийном контакте вращающегося ротора с корпусом в предложенном гироскопе решена следующим образом. Зазор между ротором и статором вращения выполняется меньше зазора «ротор - статоры подвеса». Например, при аварийном отключении питания ротор касается прежде всего статора вращения 5 (фиг. 1), что вызывает начало прямого (по направлению вращения ротора) обката. Под действием возникающих при этом нормальных сил давления, благодаря установке статора 5 на упругом стержне 8 ротор смещается до касания со статором подвеса (например, центральный статор 4), что вызывает начало обратного (против направления вращения ротора) обката, который, разрушая прямой обкат, приводит к безаварийному торможению ротора.
Нанесение проводящего покрытия 10 на внутреннюю цилиндрическую поверхность ротора 1 (фиг. 3) позволяет благодаря увеличению вращающего момента значительно сократить время разгона ротора (время готовности гироскопа).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С МАГНИТНЫМ ПОДВЕСОМ ИНЕРЦИОННОГО ЭЛЕМЕНТА | 2020 |
|
RU2785951C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
Изобретение относится к области приборостроения и может быть использовано в системах ориентации и навигации подвижных объектов (самолет, корабль, автомобиль), в инклинометрах (для подземной навигации) и других устройствах, где требуется информация об угловых скоростях, получаемая с помощью микромеханического гироскопа. Электромагнитный гироскоп содержит ферромагнитный ротор в виде кольца со сферической наружной и цилиндрической внутренней поверхностями, верхний, центральный и нижний статоры электромагнитного подвеса ротора, при этом статор вращения ротора выполнен обращенным и помещен внутри кольца ротора, при этом кольцо ротора выполнено с шириной В, удовлетворяющей условию А>В>С, где А - толщина пакета из трех статоров, С - толщина центрального статора. Технический результат - упрощение конструкции электромагнитного гироскопа, повышение перегрузочной способности и предотвращение аварийного обката ротора при внешних возмущениях, превышающих заданные значения. 5 ил.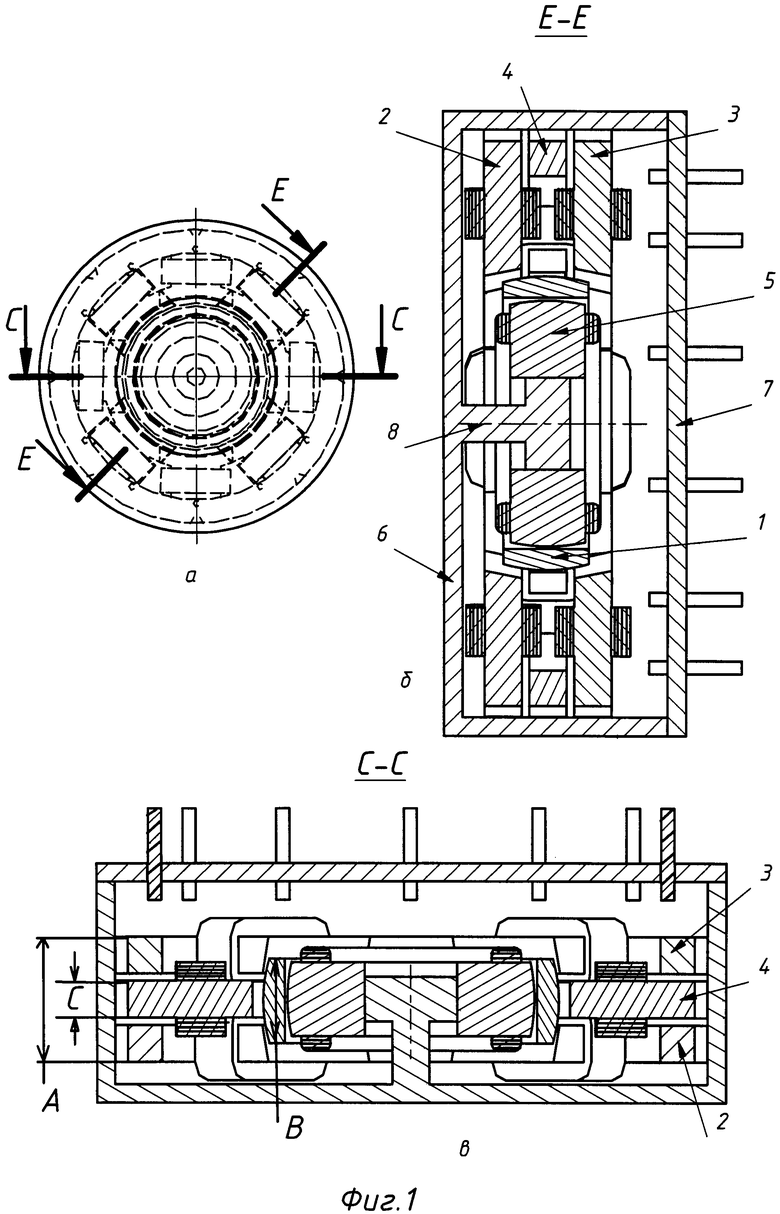
Электромагнитный гироскоп, содержащий ферромагнитный ротор в виде кольца со сферической наружной и цилиндрической внутренней поверхностями, верхний, центральный и нижний статоры электромагнитного подвеса ротора, при этом статор вращения ротора выполнен обращенным и помещен внутри кольца ротора, отличающийся тем, что кольцо ротора выполнено с шириной В, удовлетворяющей условию А>В>С, где А - толщина пакета из трех статоров, С - толщина центрального статора.
| МАГНИТОСФЕРИЧЕСКИЙ ГИРОСКОП | 1997 |
|
RU2126135C1 |
| US 3242742 A1, 29.03.1966 | |||
| RU 2064163 C1, 20.07.1996 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |

