Изобретение относится к электро- изм ерительной технике и может быть использовано при определении параметров гармонических сигналов.
Целью изобретения является повышение точности при наличии постоянных составляющих в измеряемых сигналах.
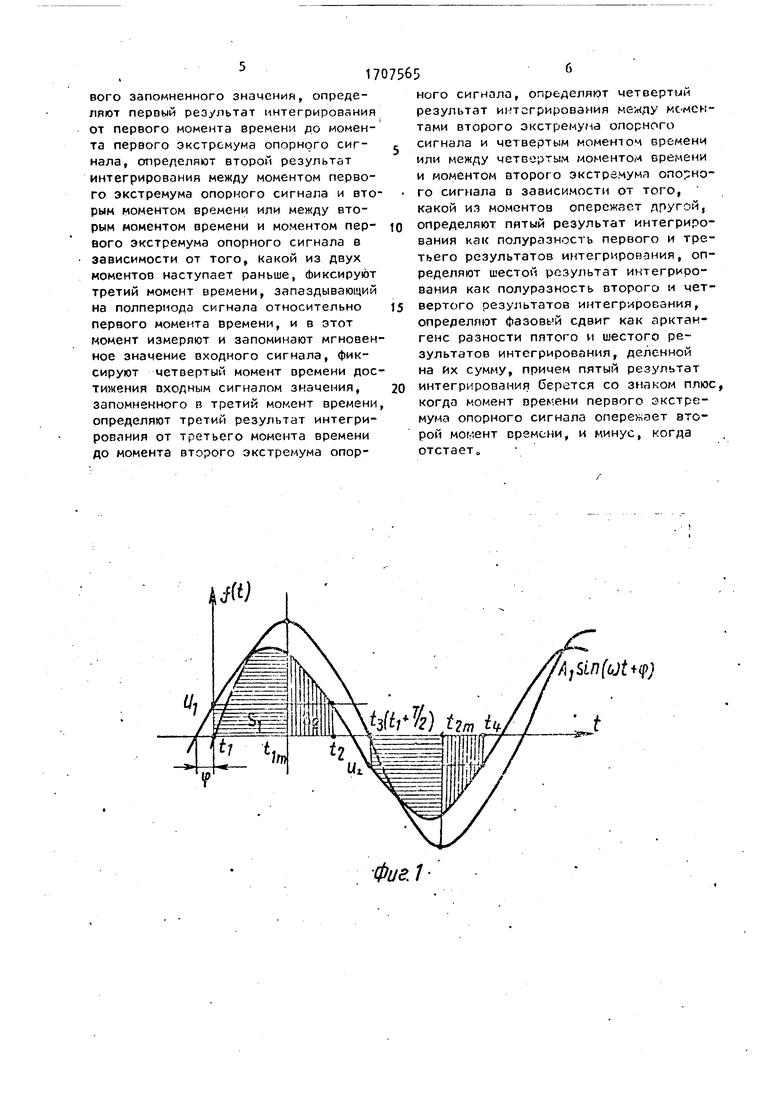
На фиг. 1 показаны диаграммы, поясняющие предлагаемый способ; на фиг. 2 - схема устройства, реализующего предлагаемый способ.
Сущность способа заключается в следующем„
Пусть опорный и измеряемый сигналы имеют вид (фчг, 1)
fe(t)A0sin XK, f (t)A,sin(coi + If ) ,
где Л , Л4 - амплитуды опорного и измеряемого сигналов; СО - частота;
tf - фазовый сдвиг измеряемого сигнала
Если в начальный момент времени t- О запоминают значение измеряемого напряжения f(t) U, определяют момент времени t.достижения измеряемым сигналом- запомненного значения U, определяют абсциссу экстремума опорного сигнала t и интегрируют измеряемый
сигнал
и tm
tot
на двух интервалах , получают
DM, tm
„- S, j A,sin(wt+ 4)dt (0)t+Cp) П1аг, i, w L Jk,.0
Л
-- (cosCf-i- sinQ),
G)
sj ±j A,sin(at+(j) (cot2+cf) + + sini( + -у(созч - sin q),
С
twrf. -1
о
sj
СЛ C Crt
«.
где учитывается равенство
соз(оНг+ф . -cos((0t4 +lf)-cosq
В случае, если t, перед результатом второго интегрирования стоит знак минус.
Решая полученные уравнения относительно фазового сдвига, получим
arctg S Z
±D,
+В„
),
где чередующиеся знаки плюс и минус соответствуют знаку разности ().
Для исключения влиянии присутствующих в измеряемых сигналах постоянных составляющих интегрирование осуществляют также на соседнем полу- периоде измеряемого сигнала. Моменты времени на соседнем полупериоде получают добавлением половины периода к моментам времени на первом полупериоде. Результаты интегрирования на первом временном интервале на соседних полупериодах равны соответственно
S, « (cos(f+8J.aif)+B(t,M,- t,)f 8Э (coeg +sin4)+B(t2tn- t4 ),
где В - постоянная составляющая; Ј4
15
(ЛЦП) l, микропроце блока 6 управления входы интегратора 1 и 3 объединены, ра 1 соединен с вхо компаратора 2 соеди выход 3 соедине входом компаратора соединен с входом М является выходом ус БУ 6 соединены с уп ми запоминающего ус разователя 1 и микр
Устройство работ ра зом.
Входной сигнал и гратором 1, АЗУ 3 з входного сигнала в 20 времени t, , который компаратор 2 срабат времени (t, t,) до сигналом запомненно интегрированное зна нала поступает на Л пускается блоком 6 менты времени t, t Ц и t m (моменты в первого и и орого э ным сигналом)„ Микр деляет интегральные S и S и рассчиты согласно предлагаем
25
30
том знака разности
t, , )- моменты времени на сосед- 35 определяется БУ 6.
них полупериодах, Вычитая второе уравнение из первого, можно исключить влияние постоянной составляющей на результат интегрирования в первом полупериоде
40
Дпя исключения п ляющей входного сиг ния повторяют через а результаты интегр ляют как полуразнос грирования на сосед
SS
S, - S э
Аналогично определяется результат второго интегрирования:
С о 4g t -S
Ь6 - 2
Таким образом, определяя результаты интегрирования как полуразности интегрирования на соседних црлупери- одах, мы исключаем постоянные составляющие измеряемых сигналовь
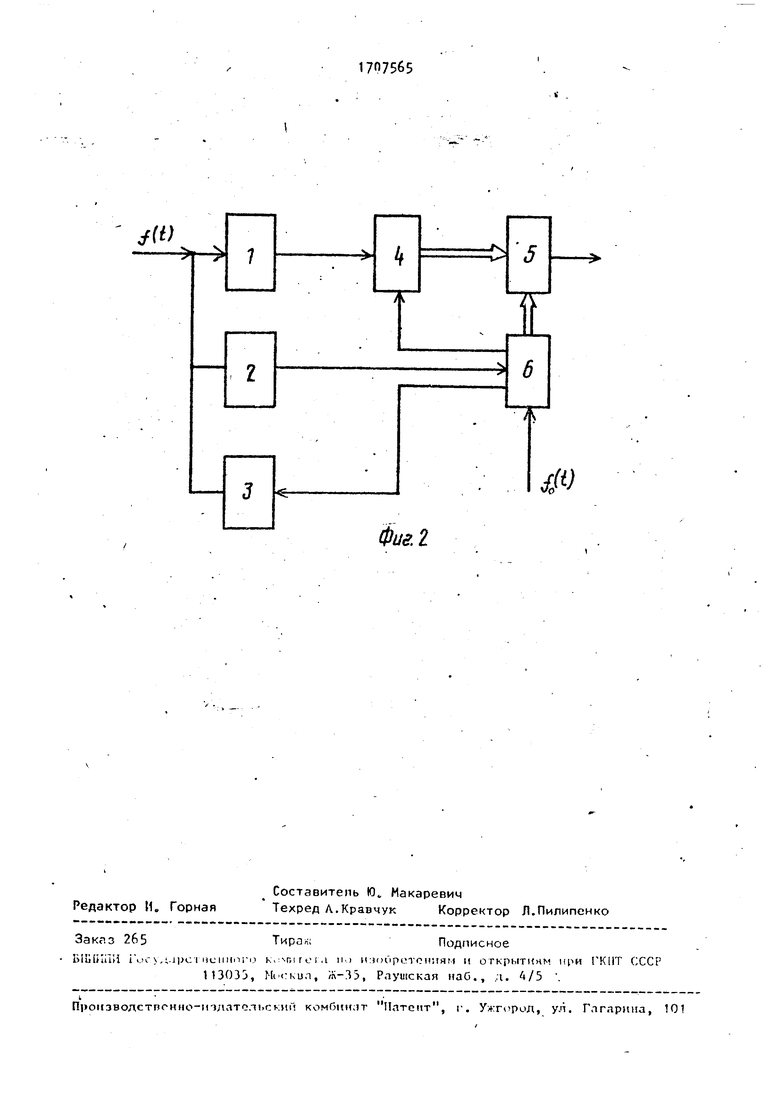
Предлагаемый способ может быть реализован, например, с помощью устройства, состоящего из (фиг. 2) интегратора 1, компаратора 2, аналогового запоминающего устройства (АЗУ) 3, анзлого-цифрового преобразователя
0
5
(ЛЦП) l, микропроцессора (МП) 5, блока 6 управления (БУ).При этом входы интегратора 1, компаратора 2 и 3 объединены, выход интегратора 1 соединен с входом ЛЦП Ь, выход компаратора 2 соединен с входом БУ 6, выход 3 соединен с управляющим входом компаратора 2, выход ЛЦП ( соединен с входом МП 5, выход которого является выходом устройства, выходы БУ 6 соединены с управляющими входами запоминающего устройства 3f преобразователя 1 и микропроцессора 5
Устройство работает следующим об- ра зом.
Входной сигнал интегрируется интегратором 1, АЗУ 3 запоминает значение входного сигнала в начальный момент 0 времени t, , который формирует БУ 6, компаратор 2 срабатывает в моменты времени (t, t,) достижения входным, сигналом запомненного значения. Проинтегрированное значение входного сигнала поступает на ЛЦП (, который запускается блоком 6 управления в моменты времени t, tu и t3, а также Ц и t m (моменты времени достижения первого и и орого экстремумов опорным сигналом)„ Микропроцессор определяет интегральные значения S,S, S и S и рассчитыоает фазовый сдвиг согласно предлагаемой формуле с уче5
0
том знака разности (t2 - t ), который
определяется БУ 6.
Дпя исключения постоянной составляющей входного сигнала цикл измерения повторяют через половину периода, а результаты интегрирования определяют как полуразности результатов интегрирования на соседних полуперибдах.
Формула изобретения
Способ определения фазового сдвига гармонических сигналов, заключающийся в том, что фиксируют моменты времени достижения опорным сигналом первого и второго соседних экстремумов, интегрируют входной сигнал в выбранные моменты времени и запоминают результаты интегрирования, отличающийся тем, что,с целью повышения точности за счет исключения влияния гостоянной составляющей входного сигнала, измеряют и запоминают в первый произвольно выбранный момент времени мгновенное значение входного сигнала, фиксируют второй момент времени достижения входным сигналом первого запомненного значения, определяют первый результат интегрирования от первого момента времени до момента первого экстремума опорного сигнала, определяют второй результат интегрирования между моментом первого экстремума опорного сигнала и вторым моментом времени или между вторым моментом времени и моментом первого экстремума опорного сигнала в зависимости от того, какой из двух моментов наступает раньше, Фиксируют третий момент времени, запаздывающий на полпермода сигнала относительно первого момента времени, и в этот момент измеряют и запоминают мгновенное значение входного сигнала, фиксируют четвертый момент времени достижения входным сигналом значения, запомненного в третий момент времени, определяют третий результат интегрирования от третьего момента времени до момента второго экстремума опорного сигнала, определяют четвертый результат интегрирования между моментами второго экстремума опорного
сигнала и четвертым моментом времени или между четвертым моментом еремени и моментом второго экстремума опорно- го сигнала в зависимости от того, какой из моментов опережает другой,
определяют пятый результат интегрирования как полуразность первого и третьего результатов интегрирования, определяют шестой результат интегрирования как полуразность второго и чет5 вертого результатов интегрирования, определяют фазовый сдвиг как арктангенс разности пятого и шестого результатов интегрирования, деленной на их сумму, причем пятый результат
0 интегрирования берется со знаком плюс, когда момент времени первого экстремума опорного сигнала опережает второй момент времени, и минус, когда отстает,,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования угла поворота вала в код | 1983 |
|
SU1124358A1 |
| Способ измерения относительной разности амплитуд двух гармонических напряжений | 1988 |
|
SU1732287A1 |
| Способ определения фазового сдвига | 1987 |
|
SU1430904A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2005 |
|
RU2281519C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2000 |
|
RU2196998C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛА | 2003 |
|
RU2239842C1 |
| Устройство для интегрирования пикообразных сигналов | 1978 |
|
SU744629A1 |
| Экстремальный регулятор | 1974 |
|
SU551606A1 |
| Преобразователь выходных сигналов параметрических датчиков в код | 1986 |
|
SU1336232A1 |
| Измеритель параметров комплексных сопротивлений | 1989 |
|
SU1751690A1 |
Изобретение относится к электроизмерительной технике и может быть использовано для определения параметров гармонических сигналов. Целью изобретения является повышение точности измерения при налили постоян ных составляющих сигналов. Фазовый сдвиг определяется из соотношений результатов интегрирования измеряемого, сигнала на интервалах интегрирования от моментов времени равного значения измеряемого сигнала, запомненного в начгльный момент измерения, ло к.омента премени достижения опорным Смгнапом экстремума. Исключение постоянных составляющих достигается повторением цикла измерения на соседнем полупериоде с 2 ил..
in((,Jt+q)
) t2mt±
фиа.1
Фиг 2
| Авторское свидетельство СССР Г , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
