Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных процессов.
Цель изобретения - повышение надежности сборки за счет адаптации устройства к погрешностям взаимного расположения собираемых деталей.
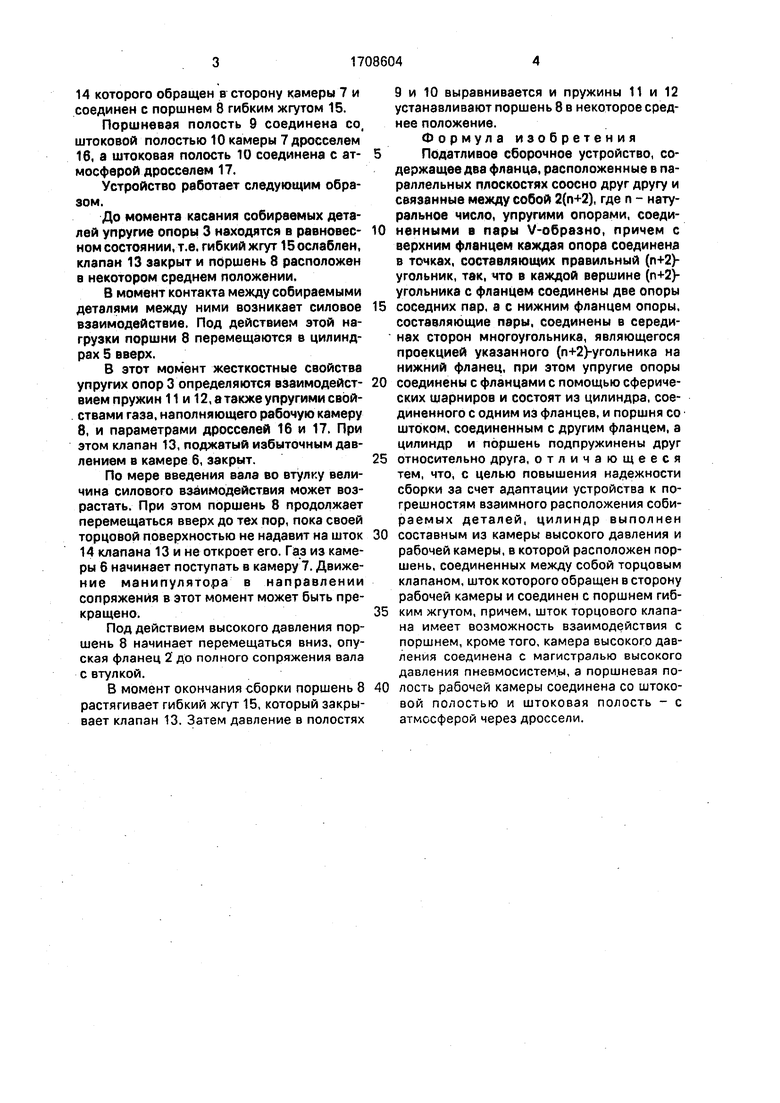
На фиг.1 показано предлагаемое устройство, общий вид; на фиг.2 - вид устройства в плане; на фиг.З - упругая опора.
Устройство содержит фланец 1, крепящийся к манипулятору, фланец 2, крепящийся к охвату, упругие опоры 3, крепящиеся к фланцам 1 и 2 с помощью сферических шарниров 4. Фланцы 1 и 2 расположены в параллельных плоскостях соосно друг другу. Количество упругих опор 3 в устройстве определяется выражением 2«(п+2), где п - натуральное число. Упругие опоры 3 соединены в пары V-образно. причем с фланцем 1 каждая опора соединена в точках, составляющих правильный (п+2)-угольник, так, что в каждой вершине (п+2)-угольника с фланцем .1 соединены две упругие опоры 3 соседних пар, а с фланцем 2 упругие опоры 3, составляющие пары,соединены в серединах сторон многоугольника, являющегося проекцией указанного (п+2)-угольника на фланец 2.
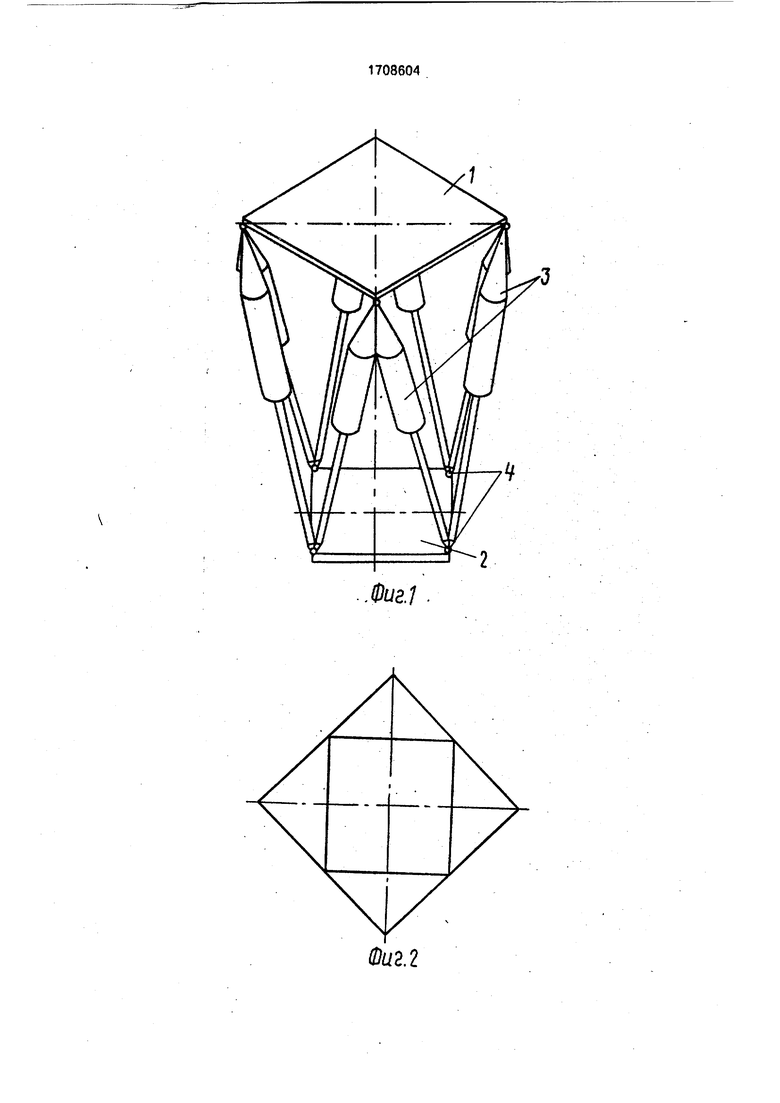
Каждая упругая опора 3 включает цилиндр 5, состоящий из камеры 6 высокого давления и рабочей камеры 7, которую поршень В делит на поршневую 9 и штоковую 10 полости.
Поршень 8 подпружинен в камере 1 с двух сторон пружинами 11 и 12. Камеры 6 и 7 соединены торцовым клапаном 13, шток
14 которого обращен в сторону камеры 7 и соединен с поршнем 8 гибким жгутом 15.
Поршневая полость 9 соединена со, штоковой полостью 10 камеры 7 дросселем 16, а штоковая полость 10 соединена с атмосферой дросселем 17.
Устройство работает следующим образом.
До момента касания собираемых деталей упругие опоры 3 находятся в равновесном состоянии, т.е. гибкий жгут 15 ослаблен, клапан 13 закрыт и пвршень 8 расположен в некотором среднем положении.
В момент контакта между собираемыми деталями между ними возникает силовое взаимодействие. Под действием этой нагрузки поршни 8 перемещаются в цилиндрах 5 вверх.
В этот момент жесткостные свойства упругих опор 3 определяются взаимодействием пружин 11 и 12, а также упругими свойствами газа, наполняющего рабочую камеру 8, и параметрами дросселей 16 и 17. При этом клапан 13, поджатый избыточным давлением в камере 6, закрыт.
По мере введения вала во втулку величина силового взаимодействия может возрастать. При атом поршень 8 продолжает перемещаться вверх до тех пор, пока своей торцовой поверхностью не надавит на шток 14 клапана 13 и не откроет его. Газ из камеры б начинает поступать в камеру 7. Движение манипулятора в направлении сопряжения в зтот момент может быть прекращено.
Под действием высокого давления поршень 8 начинает перемещаться вниз, опуская фланец 2 до полного сопряжения вала с втулкой.
В момент окончания сборки поршень 8 растягивает гибкий жгут 15, который закрывает клапан 13. Затем давление в полостях
9 и 10 выравнивается и пружины 11 и 12 устанавливают поршень 8 в некоторое среднее положение.
Формула изобретения Податливое сборочное устройство, содержащее два фланца, расположенные в параллельных плоскостях соосно друг другу и связанные между собой 2(п+2), где п - натуральное число, упругими опорами, соединенными в пары V-образно, причем с верхним фланцем каждая опора соединена в точках, составляющих правильный (п+2}угольник, так, что в каждой вершине (п+2)угольника с фланцем соединены две опоры соседних пар, а с нижним фланцем опоры, составляющие пары, соединены в серединах сторон многоугольника, являющегося проекцией указанного (п+2)-угольника на нижний фланец, при этом упругие опоры соединены с фланцами с помощью сферических шарниров и состоят из цилиндра, соединенного с одним из фланцев, и поршня со штоком, соединенным с другим фланцем, а цилиндр и поршень подпружинены друг относительно друга, отличающееся тем, что, с целью повышения надежности сборки за счет адаптации устройства к погрешностям взаимного расположения собираемых деталей, цилиндр выполнен составным из камеры высокого давления и рабочей камеры, в которой расположен поршень, соединенных между собой торцовым клапаном, шток которого обращен в сторону рабочей камеры и соединен с поршнем гибким жгутом, причем, шток торцового клапана имеет возможность взаимодействия с поршнем, кроме того, камера высокого давления соединена с магистралью высокого давления пневмосистем.ы, а поршневая полость рабочей камеры соединена со штоковой полостью и штоковая полость - с атмосферой через дроссели.
.Фиг.1.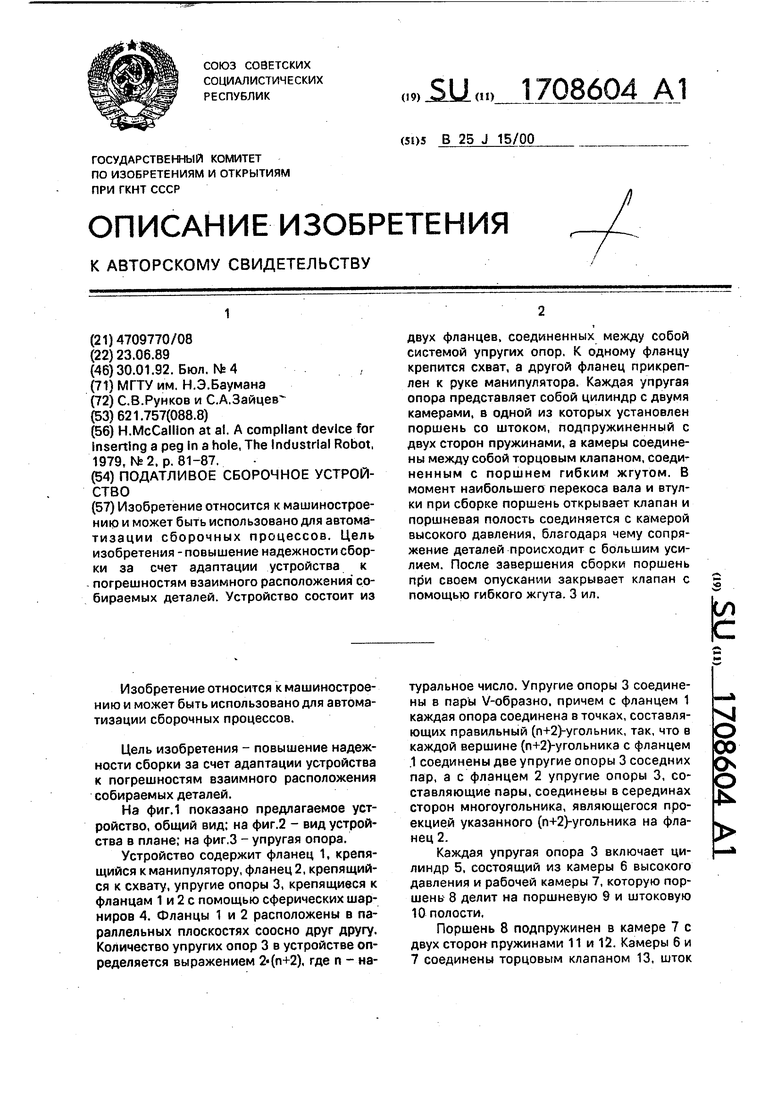
| название | год | авторы | номер документа |
|---|---|---|---|
| Податливое сборочное устройство | 1989 |
|
SU1691095A1 |
| Адаптивное сборочное устройство | 1989 |
|
SU1691094A1 |
| ИМПУЛЬСНЫЙ НАСОС С ПРИВОДОМ УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2030965C1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ СОПРОТИВЛЕНИЯ АМОРТИЗАТОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1969 |
|
SU239809A1 |
| ГИДРОПРИВОДНОЙ ПОГРУЖНОЙ НАСОСНЫЙ АГРЕГАТ | 2005 |
|
RU2296884C2 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 2011 |
|
RU2457375C1 |
| Пневматический гайковерт | 1981 |
|
SU982889A1 |
| Ударный испытательный стенд | 1984 |
|
SU1231417A1 |
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 1999 |
|
RU2165039C1 |
Изобретение относится к машиностроению и может быть использовано для автома- тизации сборочных процессов. Цель изобретения - повышение надежности сборки за счет адаптации устройства к погрешностям взаимного расположения' собираемых деталей. Устройство состоит издвух фланцев, соединенных между собой системой упругих опор. К одному фланцу крепится схват, а другой фланец прикреплен к руке манипулятора. Каждая упругая опора представляет собой цилиндр с двумя камерами, в одной из которых установлен поршень со штоком, подпружиненный с двух сторон пружинами, а камеры соединены между собой торцовым клапаном, соединенным с поршнем гибким жгутом. В момент наибольшего перекоса вала и втулки при сборке поршень открывает клапан и поршневая полость соединяется с камерой высокого давления, благодаря чему сопряжение деталей происходит с большим усилием. После завершения сборки поршень при своем опускании закрывает клапан с помощью гибкого жгута. 3 ил.
Фаг.г
(
| H.McCallion at al | |||
| А compliant device for inserting a peg in a hole, The Industrial Robot, 1979, N=2 | |||
| p | |||
| Горный компас | 0 |
|
SU81A1 |
