Изобретение относится к машиностроению и может быть использовано при автоматизации сборочных процессов.
Цель изобретения - повышение надежности сборки за счет адаптации устройства к систематическим погрешностям позиционирования.
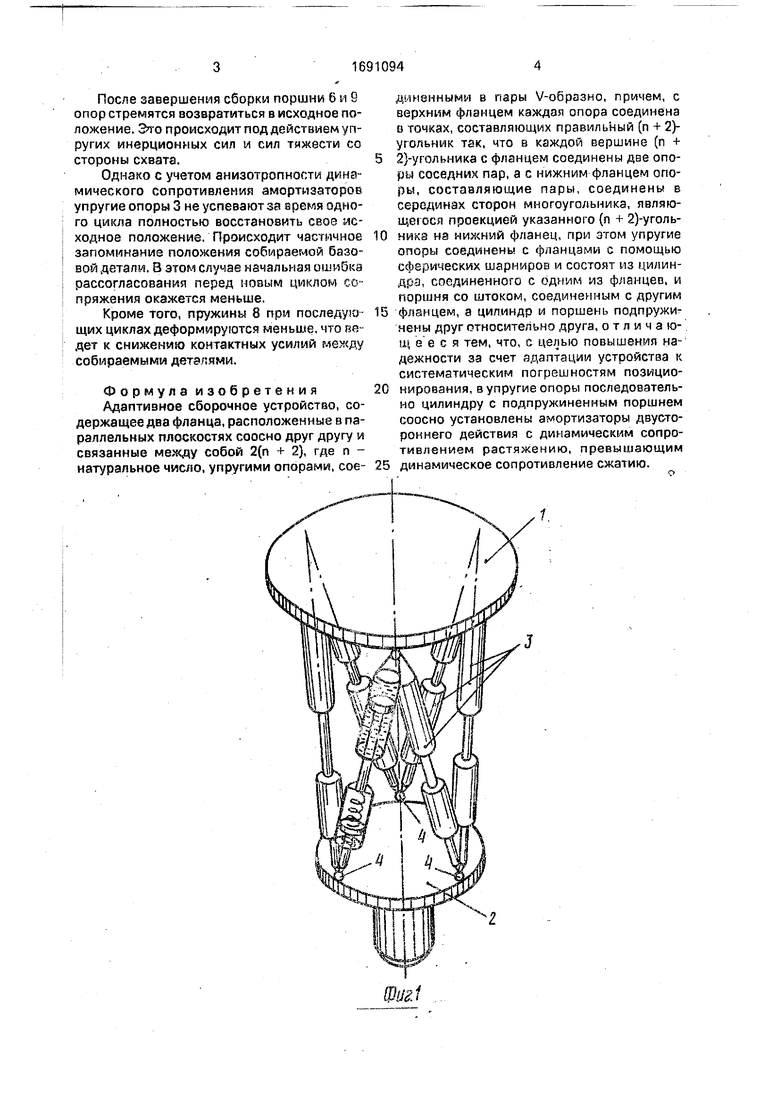
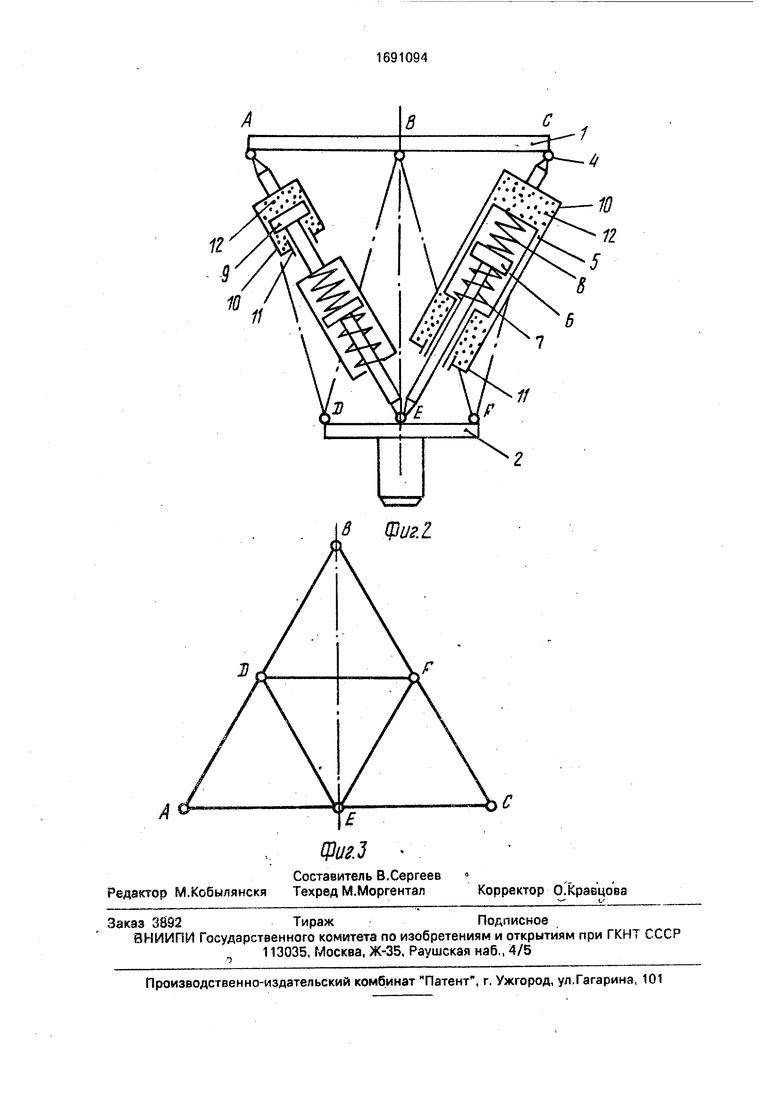
ha фиг. 1 изображено устройство, общий вид; на фиг, 2 - конструктивная схема устройства; на фиг. 3 -устройство, вид сверху.
Устройство содержит фланец 1, крепящийся к манипулятору, фланец 2, крепящийся к схвату, упругие опоры 3 в количестве2(п + 2), где п - натуральное число, соединенные - в пары V-образно и крепящиеся к фланцам с помощью сферических шарниров 4. Каждая упругая опора состоит из последовательно соединенных цилиндра с подпружиненным штоком и амортизатора. В цилиндре 5 расположен поршень 6 со штоком 7, подпружиненный относительно цилиндра пружинами 8 Амортизатор состоит из поршня 9, цилиндра 10 с уплотнением 11, наполненного рабочим веществом 12. Роль поршня 9 может играть цилиндр 5 Шарниры Ј расположены на фланцах 1 и 2 так, что в случае шести опор образуют равносторонние треугольники ABC и DEF, причем точки D, Е и F расположены на серединах проекций сторон треугольника ABC на фланец 2.
Кроме того, динамическое сопротивление амортизатора растяжению больше динамического сопротивления сжатию.
Устройство работает следующим образом.
В процессе сопряжения под действием контактных сил между собираемыми взлом и втулкой фланец 2 смещается в направлении компенсации ошибок позиционирования.
Это смещение происходит за счет осевой деформации упругих опор 3 под действием усилия со стороны манипулятора.
С/)
С
«
о ч
о ю
4Ь.
После завершения сборки поршни 6 и 9 опор стремятся возвратиться в исходное положение. Это происходит под действием упругих инерционных сил и сил тяжести со стороны схвата.
Однако с учетом анизотропности динамического сопротивления амортизаторов упругие опоры 3 не успевают за время одного цикла полностью восстановить свое исходное положение. Происходит частичное запоминание положения собираемой базовой детали, В этом случае начальная ишибка рассогласования перед новым циклом ее пряжения окажется меньше,
Кроме того, пружины 8 при последую щих циклах деформируются меньше, что ведет к снижению контактных усилий собираемыми деталями.
Формулаизобретения
Адаптивное сборочное устройство, содержащее два фланца, расположенные в параллельных плоскостях соосно друг другу и связанные между собой 2(п + 2), где п - натуральное число, упругими опорами, сое-
диненными в пары V-образно, причем, с верхним фланцем каждая опора соединена в точках, составляющих правильный (п + 2)- угольник так, что в каждой вершине (п + 2}-угольника с фланцем соединены две опоры соседних пар, а с нижним фланцем опоры, составляющие пары, соединены в серединах сторон многоугольника, являющеюся проекцией указанною (л + 2)-уголь- чикз на нижний фланец, при этом упругие опоры соединены с фланцами с помощью сферических шарниров и состоят из цилиндра, соединенного с одним из фланцев, и поршня со штоком, соединенным с другим фланцем, а цилиндр и поршень подпружинены друг относительно друга, отличающееся тем, что, с целью повышения надежности за счет адаптации устройства к систематическим погрешностям позиционирования, в упругие опоры последовательно цилиндру с подпружиненным поршнем соосно установлены амортизаторы двустороннего действия с динамическим сопротивлением растяжению, превышающим динамическое сопротивление сжатию.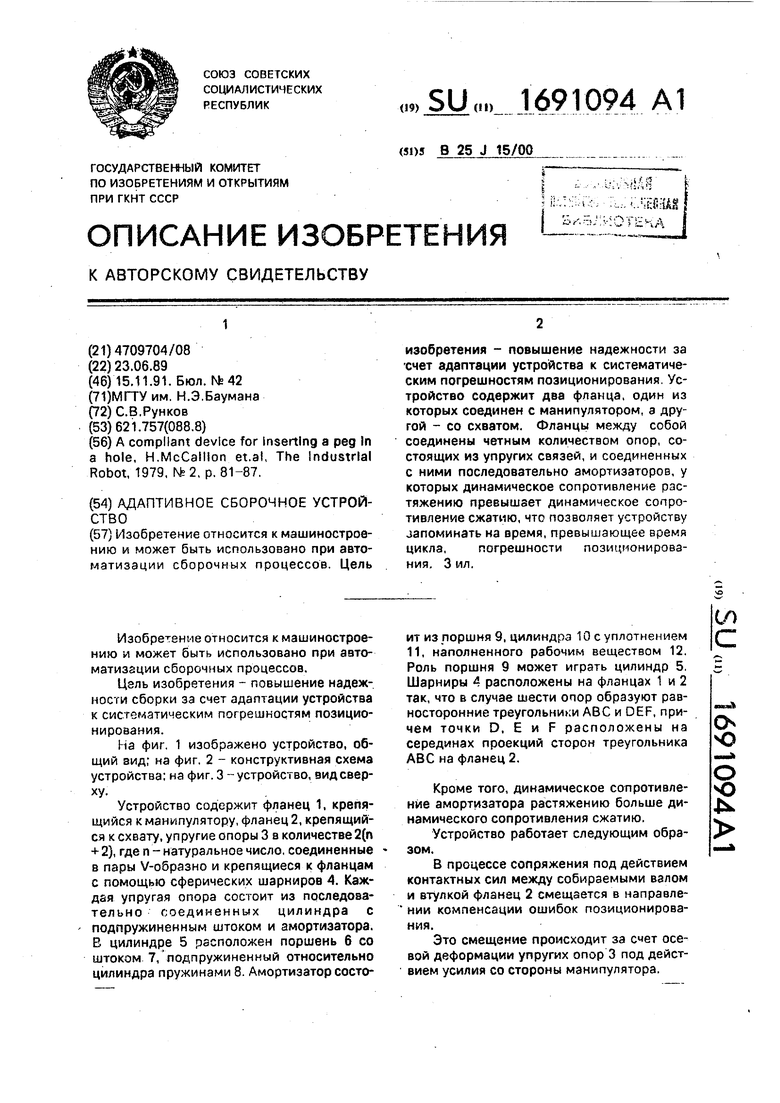
| название | год | авторы | номер документа |
|---|---|---|---|
| Податливое сборочное устройство | 1989 |
|
SU1691095A1 |
| Податливое сборочное устройство | 1989 |
|
SU1708604A1 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| МАНИПУЛЯТОР | 1996 |
|
RU2111113C1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Стенд для сборки и разборки узлов | 1987 |
|
SU1505742A1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации сборочных процессов. Цель изобретения - повышение надежности за -счет адаптации устройства к систематическим погрешностям позиционирования Устройство содержит два фланца, один из которых соединен с манипулятором, а другой - со схватом. Фланцы между собой соединены четным количеством опор, состоящих из упругих связей, и соединенных с ними последовательно амортизаторов, у которых динамическое сопротивление растяжению превышает динамическое сопротивление сжатию, что позволяет устройству запоминать на время, превышающее время цикла, погрешности позиционирования, 3 ил.
А
ФшЗ
Редактор М.Кобылянскя
Составитель В.Сергеев Техред М.Моргентал
Корректор Образцова
| A compliant device for Inserting a peg In a hole, H.McCalllon et.al, The Industrial Robot, 1979, №2, p | |||
| Горный компас | 0 |
|
SU81A1 |
