ю
Изобретение относится к измерительной технике, а именно к типовым функциональным узлам измерительной оснастки.
Известно устройство для калибровки датчиков гтеремещения, содержащее основание, подвижную платформу, ее подвеску, выполненную в виде двух плоских параллельных пружин, одни концы которых закреплены на подвижной платформе, а другие связаны с основанием, а также механизм принудительного перемещения платформы, снабженный установленным между одной из плоскопараллельных пружин иоснованием регулируемым элементом, выполненным в виде пружинной скобы для ее принудительного разжима.
Однако в данном устройстве подвижная платформа не обеспечивает достаточного диапазона линейных перемещений и не обладает возможностью проведений динамических испытаний датчиков перемещения.
Наиболее близким по технической сущности является устройство калибровки приборов датчика перемещения, которое состоит из механической части и электронного блока. Механическая часть образована рамой, несущей в своей верхней части эталонный дatчик, на котором подвешен кронштейн с поперечным профилем. На нижней стороне рама оснащена арретирующим винтом и первым и вторым установочными винтами. Между установочными винтами предусмотрен упор, соединенный поперечным профилем, и оснащенный на свободном конце кубиком, входящим в контакт с центрами обоих датчиков. Поперечный профиль контактирует с шариком, который взаимодействует с гайкой, перемещающейся вдоль винта, соединенного с валом двигателя. Корпус последнего закреплен на раме. Между поперечным профилем и корпусом помещена пружина растяжения. Механическая часть соединена с электронным блоком, связанным с эталонным датчиком посредством схемы оценки и с калибруемым датчиком посредством аналого-цифрового преобразователя. Оценивающая схема и аналого-цифровой преобразователь присоединены к микросчетчику, соединенного с телетайпом.
Устройство применяют для определения статических характеристик высокоточных датчиков длины с малым диапазоном измерений - до 10 мм. Устройство также не позволяет производить калибровку датчиков перемещения с вращающим ротором.
Цель изобретения - повышение информативности путем обеспечения динамических испытаний датчиков перемещения с вращающим ротором.
Указзнная цель достигается тем, что устройство, содержащее корпус, установленную на нем каретку с п.риводом ее перемещения, закрепленный на корпусе
эталонный датчик перемещения, узел сопряжения, предназначенный для взаимодействия с эталонным и калибруемым датчиками перемещения, и блок сравнения, предназначенный для сравнения выходных
0 сигналов датчиков, дополнительно снабже но установленным на корпусе измерителем линейных перемещений, входной элемент которого связан с приводом перемещения каретки, а узел сопряжения выполнен в виде установленной на каретке зубчатой рейки и взаимодействующих с ней двух, зубчатых колес, одно из которых закреплено на роторе эталонного датчика перемещения, а другое предназначено для закрепления на роторе калибруемого датчика перемещения.
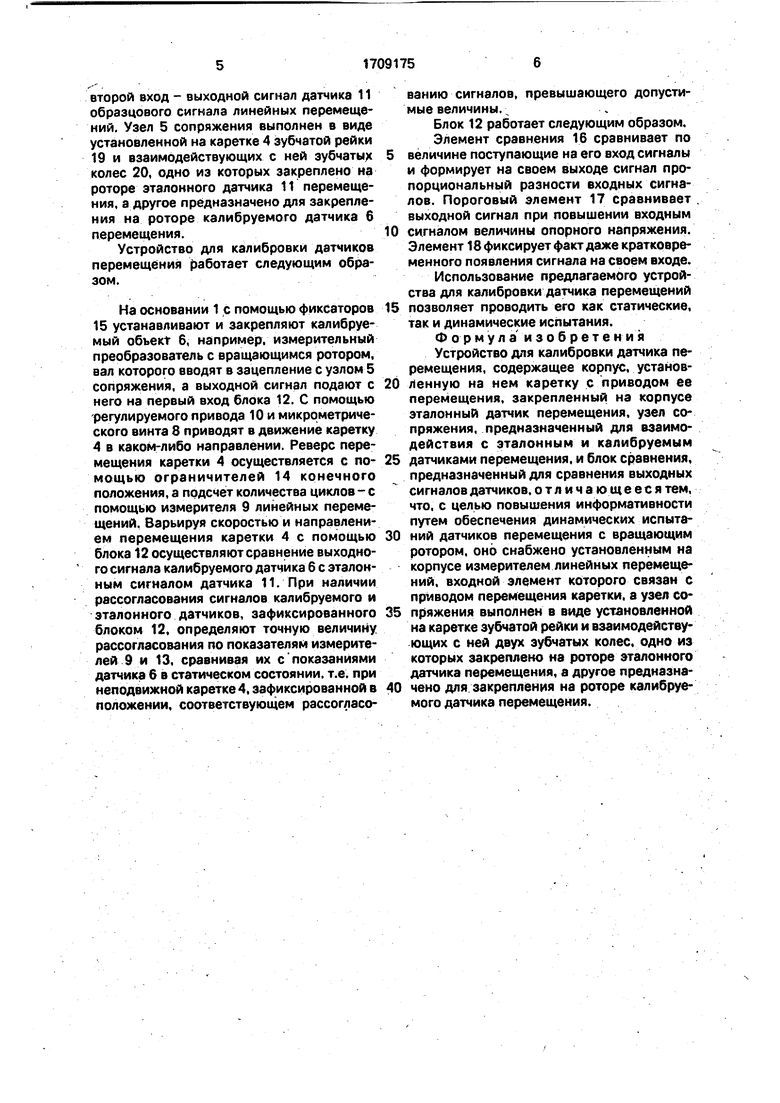
На фиг. 1 показано устройство для калибровки датчика перемещения, общий вид; на фиг. 2 - разрез А-А на фиг, 1; на фиг. 3 5 функциональная схема блока сравнения.
Устройство для измерения линейных перемещений содержит корпус, состоящий из основания 1 и закрепленных на нем вертикальных стоек 2 и 3, каретку 4 с укрепленным на ней узлом 5 сопряжения с калибруемым датчиком 6, установленную на направляющих 7 и приводимую в движение микрометрическим винтом 8; измеритель 9 лин ейных перемещений; регулируемый
5 привод 10, установленный на стойке 2 и передающий вращение микрометрическому винту 8; эталонный датчик 11 ли eйныx перемещений, укрепленный на основании 1 и введенный в зацепление с узлом 5 сопряжения.
Направляющие 7 и микрометрический винт 8 расположены между вертикальными стойками 2 и 3. Блок 12 служит для сравнения выходного сигнала калибруемого датчика 6 с сигналом эталонного датчика 11. При необходимости более точных измерений на узел 5 сопряжения может быть установлен дополнительно образцовый измеритель 13 линейных перемещений. Ограничители 14
0 конечного положения каретки 4 закреплены настойках 2 и 3. Неподвижная часть калибруемого датчика 6 крепится на основании 1 с помощью фиксатора 15, а .подвижная его часть кoнtaктиpyeт с узлом 5. Блок 12 содержит последовательно включенные элемент 16 сравнения, пороговый элемент 17 и фиксатор 18 величины отклонения выходного сигнала испытуемого датчика б от эталонного. На первый вход блока 12 поступает выходной сигнал калибруемого датчика б, а
второй вход - выходной сигнал датчика 11 образцового сигнала линейных перемещений. Узел 5 сопряжения выполнен в виде установленной на каретке 4 зубчатой рейки 19 и взаимодействующих с ней зубчаты колес 20, одно из которых закреплено на роторе эталонного датчика 11 перемещения, а другое предназначено для закрепления на роторе калибруемого датчика 6 перемещения.
Устройство для калибровки датчиков перемещения работает следующим образом.
На основании 1 с помощью фиксаторов 15 устанавливают и закрепляют калибруемый объект 6, например, измерительный преобразователь с вращающимся ротором, вал которого вводят в зацепление с узлом 5 сопряжения, а выходной сигнал подают с него на первый вход блока 12. С помощью регулируемого привода 10 и микрометрического винта 8 приводят в движение каретку А в каком-либо направлении. Реверс перемещения каретки А осуществляется с помощью ограничителей 14 конечного положения, а подсчет количества циклов - с помощью измерителя 9 линейных перемещений. Варьируя скоростью и направлением перемещения каретки 4 с помощью блока 12 осуществляют сравнение выходного сигнала калибруемого датчика 6 с эталонным сигналом датчика 11. При наличии рассогласования сигналов калибруемого и эталонного датчиков, зафиксированного блоком 12, определяют точную величину рассогласования по показателям измерителей 9 и 13, сравнивая их с показаниями датчика 6 в статическом состоянии, т.е. при неподвижной каретке 4, зафиксированной в положении, соответствующем рассогласованию сигналов, превышающего допустимые величины. .
Блок 12 работает следующим образом.
Элемент сравнения 16 сравнивает по величине поступающие на его вход сигналы и формирует на своем выходе сигнал пропорциональный разности входных сигналов. Пороговый элемент 17 сравнивает выходной сигнал при повышении входным сигналом величины опорного напряжения. Элемент 18 фиксирует факт даже кратковременного появления сигнала на своем входе.
Использование предлагаемого устройства для калибровки датчика перемещений позволяет проводить его как статические, так и динамические испытания.
Формул а изобретения
Устройство для калибровки датчика перемещения, содержащее корпус, установленную на нем каретку с приводом ее перемещения, закрепленный на корпусе эталонный датчик перемещения, узел сопряжения, предназначенный для взаимодействия с эталонным и калибруемым датчиками перемещения, и блок сравнения, предназначенный для сравнения выходных сигналов датчиков, отличающееся тем, что, с целью повышения информативности путем обеспечения динамических испытаний датчиков перемещения с вращающим ротором, оно снабжено установленным на корпусе измерителем линейных перемещений, входной элемент которого связан с приводом перемещения каретки, а узел сопряжения выполнен в виде установленной на каретке зубчатой рейки и взаимодействующих с ней двух зубчатых колес, одно из которых закреплено на роторе эталонного датчика перемещения, а другое предназначено для закрепления на роторе калибруемого датчика перемещения.
ll
te2
12
1вход
18
2Вход
16
фиг.З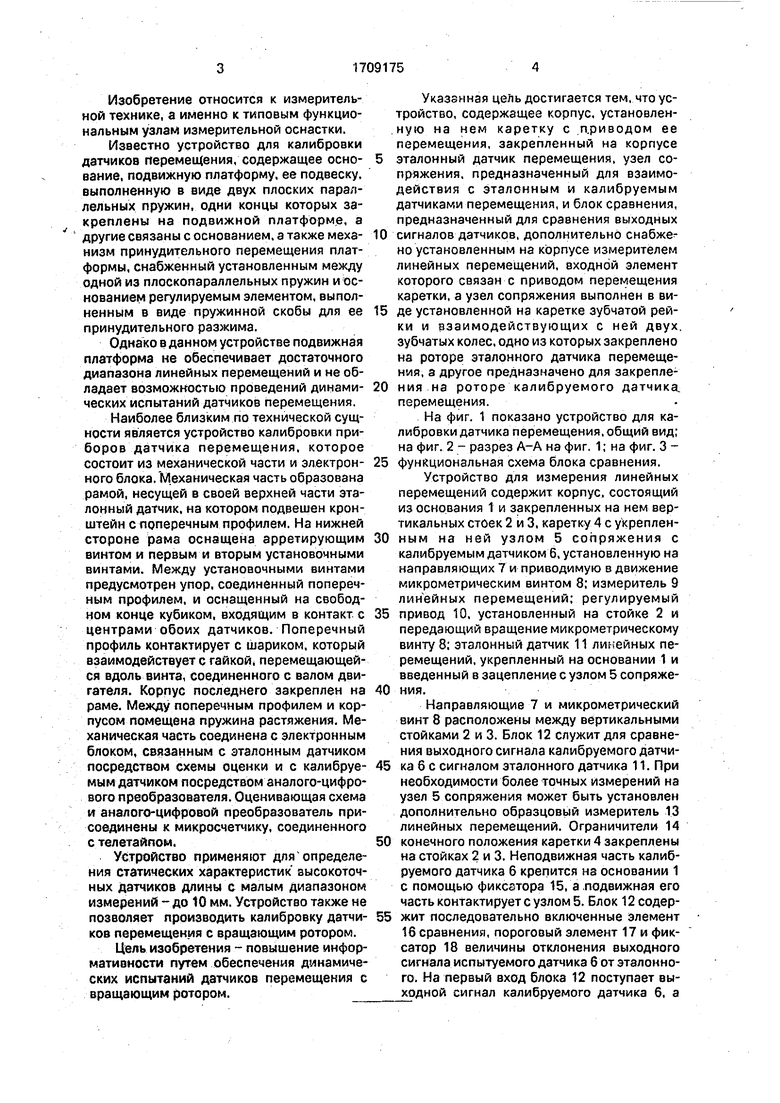
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для калибровки измерителя линейных перемещений | 1989 |
|
SU1679179A2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ЖИДКИХ ИЛИ ПАСТООБРАЗНЫХ ВЕЩЕСТВ НА ТВЕРДЫЕ ПОДЛОЖКИ И ЕГО МЕХАНИЗМ КАЛИБРОВКИ ЗАЗОРА РАКЕЛЬНОГО БЛОКА | 2003 |
|
RU2238153C1 |
| ВИБРОДАТЧИК С ЭЛЕМЕНТОМ ЦИФРОВОЙ КАЛИБРОВКИ | 2013 |
|
RU2558636C2 |
| СПОСОБ КАЛИБРОВКИ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777350C1 |
| Устройство для калибровки измерителя линейных перемещений | 1988 |
|
SU1580152A1 |
| УСТРОЙСТВО КАЛИБРОВКИ ВИХРЕТОКОВЫХ ДАТЧИКОВ | 2006 |
|
RU2306525C1 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ ДАТЧИКА ИЗМЕРЕНИЯ МАЛЫХ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2510487C1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
| Тензокалибратор | 1989 |
|
SU1714327A1 |
| Испытательный стенд | 1989 |
|
SU1760326A1 |

Изобретение относится к измерительной технике, а именно к типовым функциональным узлам измерительной оснастки. Цель изобретения - повышение информативности за счет обеспечения динамическихИспытаний датчиков перемещения. На основании 1 укреплены две вертикальные стойки 2 и 3. между которыми установлены направляющие 7. На направляющих 7 установлена каретка 4. приводимая в движение регулируемым приводом 10 с помощью микрометрического винта 8. На основании 1 расположены датчики 11 образцового сигнала линейных перемещений и испытуемый датчик 6. которые контактируют с кареткой 4. Перемещением каретки 4 воздействуют одновременно на датчики 6 и 11. выходные сигналы которых сравниваются блоком 12. фиксирующим наличие факта рассогласования сигналов. Точную величину рассогласования определяют по показаниям измерителя 9 или 13. 3 ил.сгfe
