Изобретение относится к машиностроению, а именно к исполнительным устройствам роботов и манипуляторов, и может быть использовано для привода их кинематических звеньев.
Цель изобретения - повышение быстродействия и ресурса.
На чертеже схематически изображена искусственная мышца, продольный разрез.
Искусственная мышца содержит ортотропную оболочку 1 с расположенным в ней эластомерным обьемом 2, в котором размещены электролитические ячейки 3. Каждая ячейка 3 содержит два электрода, один из кofopыx анод 4, а другой - катбд 5. Анод 4 выполнен обратимым твердофазным, например, на основе железа, а катод 5-в виде обратимого газового электрода, например водородного. Анод 4 и катод 5 разделены пористым сепаратором, содержащим водный электролит 6.
Конструктивно анод 4 выполнен в виде нити из углеволокна, покрыт активной массой на основе, например, смеси железа с гидроокисью железа. Катод 5 расположен параллельно аноду 4 и выполнен в виде композитной нити, состоящей на уровне элементарных волокон из смеси каталитически активированного углеволокна, например, типа сиблон и фторопластового волокна.
Анод 4 и катод 5 чередуются между собой и переплетены неэлектропроводным лиофильным волокном, например хлорином, поры которого заполнены электролитом.
Искусственная мышца работает следующим образом.
На анод 4 и катод 5 подается постоянное напряжение, при этом на катоде 5 выделяется ёодород, заполняющий эластомерный объем 2, что приводит к сокращению ортотропной оболочки 1 за счет разворота междоузлий ее плетений. При изменении полярности напряжения прЪисходит расслабление электронной мышцы, при
этом на катоде 5 происходит поглощение водорода, который в электролите 6 соединяется с кислородом и переходит в молекулы воды. Давление в эластомерном объеме 2
падает и электронная мышца может вновь удлиняться.,
Эффективность процессов, происходящих на электродах искусственной мышцы, значительно выше, чем в известных, так как
благодаря особенностям их волоконного выполнения достигается увеличение зон активности, а вследствие этого, большие величины плотности тока. Повышение ресурса ее работы обеспечивается более высокой
стойкостью водородного электрода по сравнению с известным кислородным. Формула изобретения
1.Искусственная мышца, содержащая ортотропную оболочку с расположенным в
ней эластомерным объемным элементом, в котором размещены электролитические ячейки, в каждой из которых находятся два электрода-анод и катод, а также размещенный между ними электролит, отличающ а я с я тем, что, с целью повышения быстродействия и ресурса, она снабжена пористым сепаратором, переплетающим электроды и выполненным из электроизоляционного лиофильного волокна, поры которого заполнены электролитом, при этом электрод-анод выполнен в виде нити углеволокна, покрытой смесью железа с гидроокисью железа, а электрод-катод выполнен в виде композитной нити, состоящей из волокон, представляющих собой смесь каталитически активированного углеволокна и фторопластового волокна, причем электроды расположены параллельно друг другу и чередуются .в рядом расположенных ячейках.
f
2.Мышца по п. 1, о т л и ч а ю щ а я с я тем, что каталитически активированное углеврлокно выполнено в виде волокна типа
сиблон, а в качестве лиофильного волокна использован хлорин.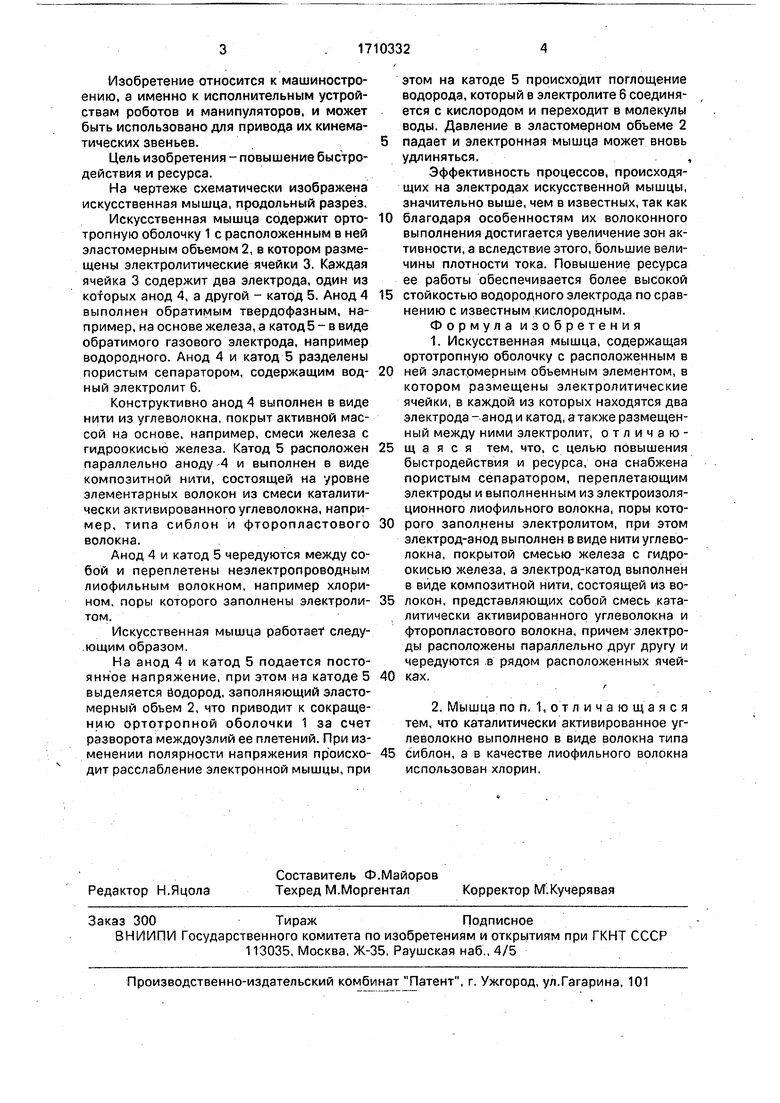
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная мышца | 1989 |
|
SU1710331A2 |
| Искусственная мышца | 1988 |
|
SU1609644A1 |
| КАТАЛИТИЧЕСКИЙ ВОЗДУШНЫЙ КАТОД ДЛЯ МЕТАЛЛОВОЗДУШНЫХ АККУМУЛЯТОРОВ | 2000 |
|
RU2236067C2 |
| Электрохимическая твердотельная топливная ячейка | 2016 |
|
RU2628760C1 |
| ЭЛЕКТРОЛИТИЧЕСКАЯ ЯЧЕЙКА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2010 |
|
RU2484182C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ ЗАРОДЫШЕОБРАЗОВАНИЯ ВО ВРЕМЯ ЭЛЕКТРОЛИЗА | 2010 |
|
RU2489523C2 |
| УСТРОЙСТВО И СПОСОБ УЛАВЛИВАНИЯ ГАЗА ВО ВРЕМЯ ЭЛЕКТРОЛИЗА | 2010 |
|
RU2487195C2 |
| БРОМНО-ЦИНКОВЫЙ АККУМУЛЯТОР С НЕПРОТОЧНЫМ ЭЛЕКТРОЛИТОМ | 2009 |
|
RU2400871C1 |
| Электродный блок для электрохимической регенерации окисленного электролита | 1985 |
|
SU1254066A1 |
| ДИОД СО ВЗРЫВОЭМИССИОННЫМ КАТОДОМ | 1987 |
|
SU1501819A1 |
Изобретение относится к машиностроению, а именно к исполнительным устройствам роботов и манипуляторов, и может быть .использова.но для привода кинематическихзвеньев. Целью изобретения является повышение быстродействия и ресурса. "Сокращение" искусственной мышцы происходит при подаче на анод 4 и катод 5 постоянного напряжения, что приводит к выделению на, катоде 5 водорода, заполняющего зласто- мерный объем 2, находящийся в орп^отроп- ной оболочке 1. При изменении полярности напряжения происходит поглощение водорода и "расслабление" мышцы. Выполнение анода 4 и катода 5 в виде нитей углеволок- на и волокон из смеси каталитически активированного углеволокна соответственно повышает эффективность происходящих процессов. 1 з.п. ф-лы, 1 ил.•^ЁОсо U) ю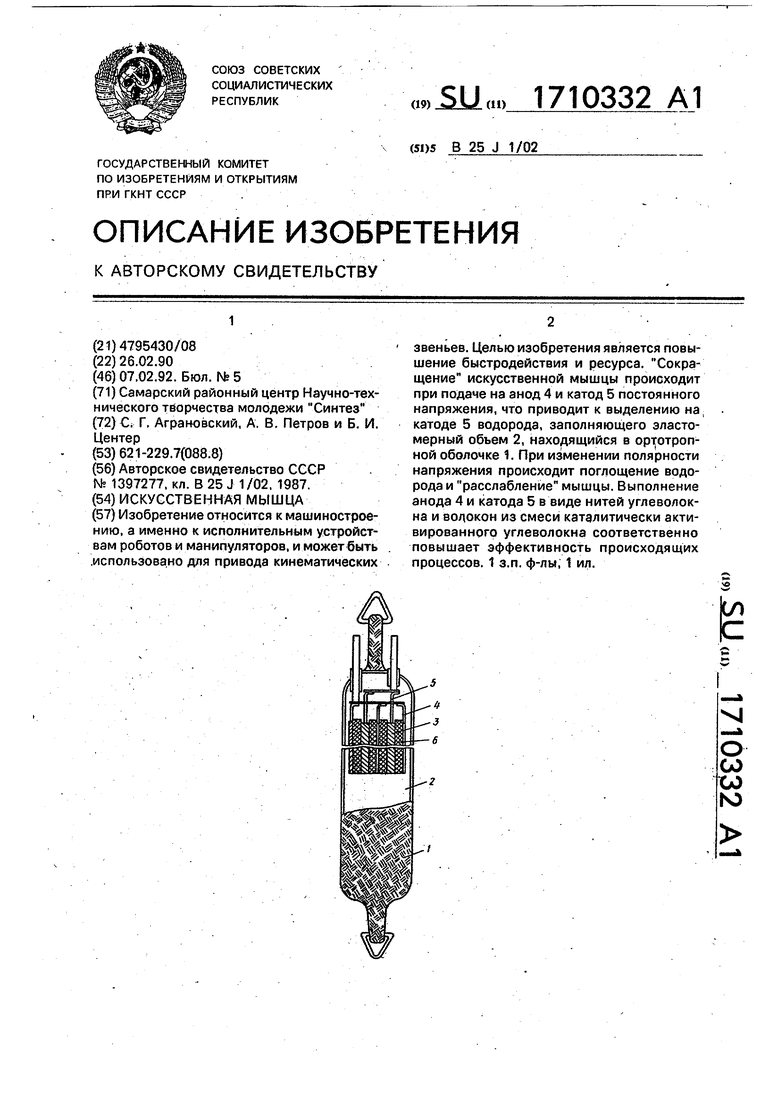
| Модуль робота | 1987 |
|
SU1397277A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
