Изобретение относится к машиностроению, а именно к конструкциям манипуляторов.
Целью изобретения является улучшение кинематических свойств путем равномерного распределения приводного усилия на звеньях.
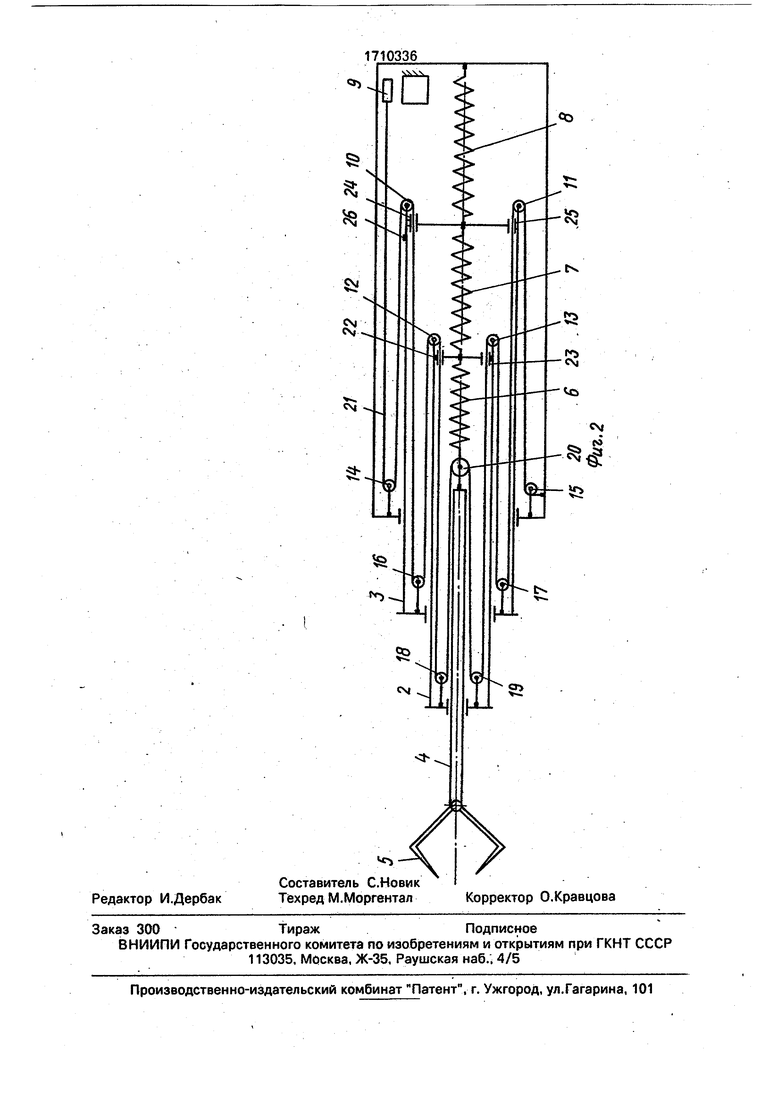
На фиг. 1 изображен модуль манипулятора в исходном состоянии, общмй вид; на фиг. 2 -тоже, в выдвинутом состоянии.
Модуль манипулятора состоит из корпуса 1, телескопической руки, выполненной в виде размещенных одно в другом выдвижных звеньев 2 и 3, толкателя 4 и жестко соединенного с ним выходного элемента 5. Толкатель 4 и выдвижные звенья 2 и 3 последовательно связаны друг с другом и с корпусом 1 с помощью пружин 6-8. Привод выдвижных элементов выполнен в виде приводного барабана 9 и тросрблочной системы 10-21. Блоки 10. 11 и 16, 17 трособлочной системы закреплены попарно на противоположных торцах выдвижного звена 3, а блоки 12, 13 и 18. 19 - попарно на противоположных торцах выдвижного звена 2. Блоки 14 и 15 закреплены на переднем торце корпуса 1, а блок 20 соединен с толкателем 4 и пружиной 6. Все парные блоки расположены симметрично относительно продольной оси руки. Трос 21 последовательно связан с блоками 14, 10. 16. 12, 18, 20. 19, 13,17, 11 и 15, при этом один конец троса 21 неподвижно закреплен на корпусе 1 модуля манипулятора, а другой - на барабане 9 привода телескопической . На задних торцах выдвижных звеньев 2 и 3 выполнены отверстия 22-25 подтрЬсы. На выдвижном звене 3 расположён конечньгй выключатель 26.
Модуль манипулятора работает следующим образом.
При работе электродвигателя, например, на выдвижение выходного злеменУа 5 вращается приводной барабан 9, на который нам гыьается трос 21. Трос 21, проходя последовательно блоки 14 и 10, отверстие 24 в задней стенке выдвижного звена .3, блоки 18, 20 и 19. отверстие 23 в задней стенке выдвижного звена 2, блоки 13 и 17, отверстие 25 в задней стенке выдвижного звена 3 и блок 11 заставляет выдвигаться толкатель 4 из выдвижного звена 2, растягивая пружину 6, а выдвижное звено 2 - из выдвижного звена 3. растягивая пружину 7.
При этом выдвижное звено 3 выдвигается из корпуса 1, растягивая пружину 8 (фиг. 2). Неподвижные блоки 14 и 15, закрепленные на корпусе 1 модуля манипулятора, являются направляющими для подвижных блоков 10-19, установленных на выдвижных звеньях 2 и 3. Благодаря симметричному расположению блоков относительно оси телескопической руки усилия, передаваемые
через блоки на звенья манипулятора, распределяются равномерно и симметрично относительно оси, улучшая этим кинемати ческие свойства модуля.
При полном выдвижении выходного
элемента манипулятора Срабатывает конечный выключатель 26, при этом привод отключается. Общее изменение длины в выдвинутом состоянии равно сумме выдвижений толкателя 4 из выдвижного звена 2,
выдвижного звена 2 из выдвижного звена 3,
выдвижного звена 3 из корпуса 1. Фиксация выходного элемента 5 в любом требуемом положении осуществляется отключением и торможением привода, например, с помощью встроенного тормоза (не показан). Для возвращения выходного элемента 5 в исходное положение (фиг. 1) необходимо отключить тормоз привода. При этом под действием пружин 6-8, которые сжимаются, происходит сматывание троса 21с приводного барабана 9, а также втягивание толкателя 4 в выдвижное звено 2, втягивание выдвижного звена 2 в выдвижное звено 3 и втягивание выдвижного звена
3 в корпус 1.
Формула изобретения Модуль м анипулятора, содержащий корпус, телескопическую руку, выполненную в виде размещенных одно в другом выдвижных звеньев, последовательно связанных друг с другом и с корпусом с помощью пружинi а также привод, выполненный в виде приводного барабана и трособлочной системы, блоки которой
расположены на торцах звеньев руки, а трос последовательно связан с блоками, о т л и-, чающийся тем, что,с целью улучшения кинематических свойств за счет равномерного распределения приводного усилия на
звеньях, блоки размещены на обоих торцах каждого звена попарно и симметрично относительно продольной оси руки, при этом на задних торцах звеньев выполнены отверстия под трОсы.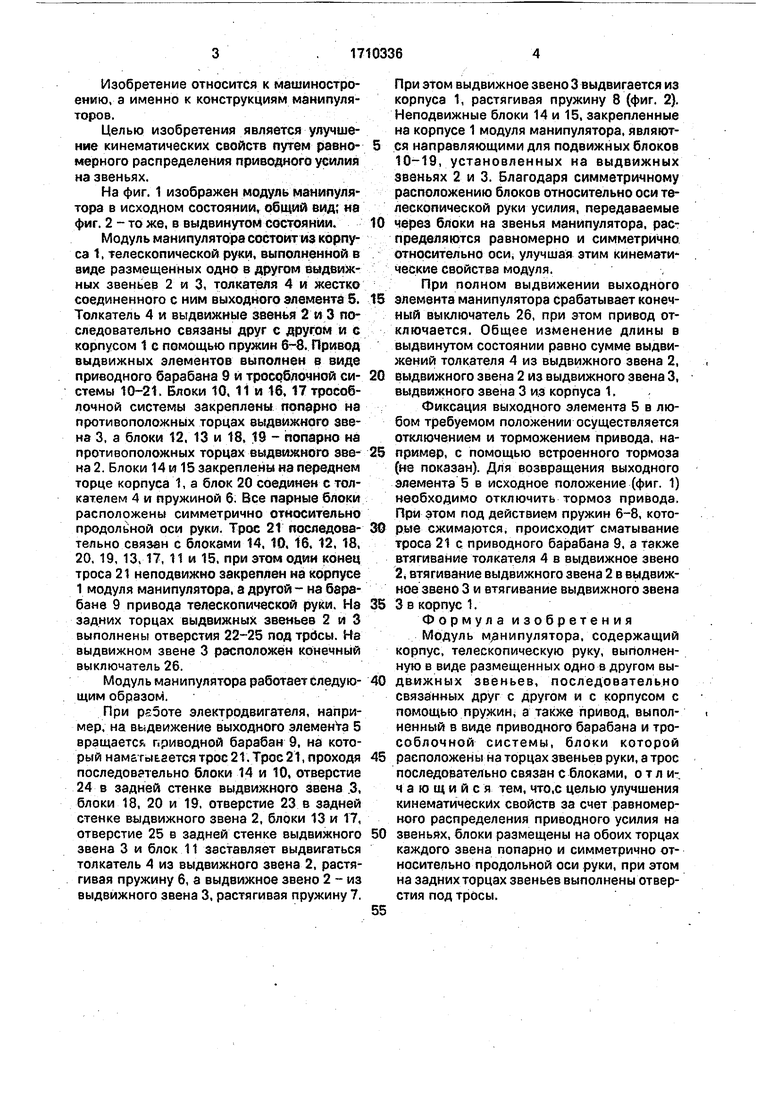
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1987 |
|
SU1458214A1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| Манипулятор | 2024 |
|
RU2833644C1 |
| Манипулятор лесной машины | 2024 |
|
RU2831151C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЛИНЫ ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛЫ | 1997 |
|
RU2128622C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2345947C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
Изобретение относится к общему машиностроению. Цельк) изобретения является улучшение кинематических свойств за счет равномерного распределения приводного усил14я на звеньях. При вращении приводного барабана 9. на который наматывается трос 21, усилие на выдвижение выходного элемента 5 равномерно распределяется через блоки, попарно и симметрично размещенные на звеньях 2-4, телескопически связанных Одно с другим. 2 ил.5\2122 12 26 2ff 10 Э\-\ \ I / /Г I 20 6 23 13 V 2? '//<Риг.1ОыCJс>&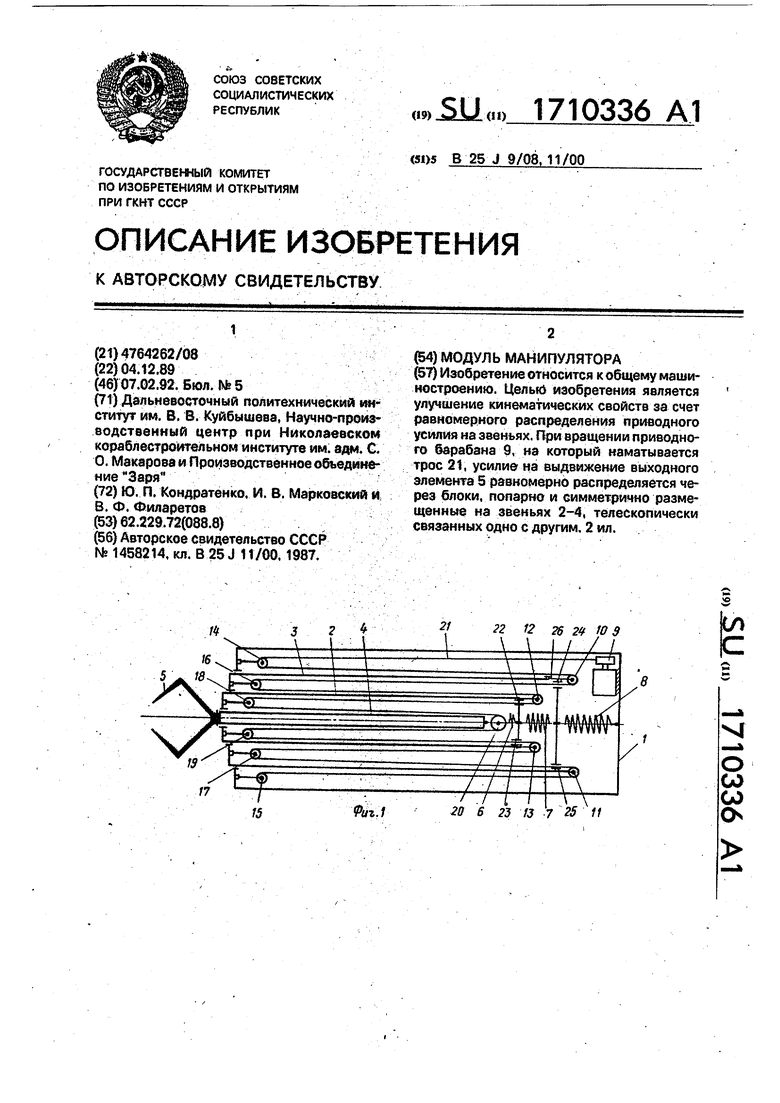
| Модуль манипулятора | 1987 |
|
SU1458214A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
