fpue.J
Изобретение относ1Г1ся M;I: ииг:-- строению, а n reiiiio к конструкциям манипуляторов, pa6oTairuVi-ix в агрессивных средах, aiipHMep г--опской воде.
Целью кзобре -еиик яплкстся ггопы- шение падеж; ости при ;-;гботе в агрессивных средах,
На (|jH г . 1 сх е м а т н ч и ( и - о б р а ж е; : модуль ма ;ипу::ятора н icxoп, состоянии; на фиг, 2 -- г:ром;5куточ ое положение модуля;; на фиг,3 - модул i-, млнипулятсфа г иыднигг том состс. Я и и.
С о с то я НИИ м .а и и п ул я о i) а с f с т о т 1з корпуса 1, Т Ыд-и1жн(;к секции 2, расиоложе}И ой -ниутрь корпуса 1 , ;; гр толкателей 3 и -.. пас1н:и ОЖЕН1п,ж :.
nOJIOCTIi CCKiiHil 2, rpli riro;-:
один конец тс исагеля ; проходит гермет 1л ;ое уплс Тнс иис ) и жесткг с корпусом 1.. ,i о,лил из кон- цор второго толкаTij. ij:; ч также ;ipi:- ходит через .ич) ;;е умотнеиие 6 ВЫДВИЖ1ИЭЙ 2 п с.:-}у,-та с иь;- ходоным элементом 7 и 1) пере- ме1;(ения выходиот о элеуе1гга. Привод выходного шемрлта Bi :rioj :- нен, например, в ги- де приводного барабана 8 и т ::ссс бло-:г;1ой cncrcMbij блоки хоторо: псг-прио распс;ло- жены на противополс жныч и,1д-- вижнок ,чи /. pii ;T -1 Гл -ки 10 п 11 каждой пары же:сгк1- спяпап -: с гордом ко зиуса вьгмискио ::е-кп,:1и 2, а. блоки 9 и 12 жесч:;,; с .: с соипа- coo f ieTCTBeii :o тол:-; ; и 4 ;: подпру ки1им Ticx:pe,:iCTi ;N: rfo «ii:-i П т;
4 ОТНОСИ : 4L; :o TOi UC - bcVMiyca iri;;Еижной секдм - 2. С;;; TI.:-л- ;х:;(.;ко }--i2 О1 ибает 1 ибк -(й jrcMeir; , lu-.лоим-: трос 15, оди;1 кочед ксторо ;; ;; ::чрс: ЛС на
торце ;ЗЬ:Д1П1ЖНОЙ ССКЦИ 2.. л ,;;;
конец с).5я::а;- с привол.; оь бараб. ; , Гибкая герметична;) тр; м-а И) с 1е, ет выдч Ш11ую 2 ; KOi - ieHcaToiX) 17 переменнгт а :б ье а, Па толкатсм; 3 рас1тол 1жен кси-о- ый ;,ь: Л11Ч. Г Ч : ь -i . Компенсатс. р г;о:Т1еменгч- ) о о-;, ем; BI-I- полнен, HanpHN -.-p, : ici т ) ;на:)г;; устройсТ ва .
При работе ь ектрсд гига/ еля, например на вы;7вга е1 И1 вьссодного элемента вращается юй бараба;; 8, на которьй а;-1ат ;:вас гс-1 i5. Связанные TpocijNi ,5 пелni ;KHi,:e бло--:и 9 и 12 начинают перемещаться, растя; - вая соответ.:тле}П10 13 и 14. При этом то. п. л те;:;; 3 п , жестко Пг- заннь соо гветсг 1еи} Г1 - - кпюкиы - и
вижнои секции
вьщвигаются и- выд- в нротивоположных
направлен:;ях (фиг.2), Неподвижные 6;1О1.;и 1 u и Г являются; соог;ветстве н но напраг ля СГ1Ими для подвижньк блоков 9 и 12, Поскол7зку толкатель 3 жесп ко связан с корпусом 1 , то при смешении блока 9 вьи:1вижная секция 2
ыцвигается из корпуса 1, а при сме- (Ц мгии блока : 2 из вьщвижной 2 выдвигается второй толкатель 4 „ Гфи выдвргжении толкателей 3 и i o6 beNs в г-ерметичной ги.угвижной секции 2 увеличивается5 дгпшение падает, ноявля-. ется разность давлений вгерметичной 51 |движлой секции 2 и компенсаторе 17. Компенсатор 17 сжимается и через трубку 16, которая осуществляет
между секггией 2 и компенсатором Г/. д;; г;лен1:е равновеигивается „
iipi полном выдвижении вьгх:одь (;|Г-о гмемента 7 ма -ипулятора сбрасьп.зает (;и1ечна1й вык1;ио1.:атель 18, при этом
отк;гюг; ается. Общее изменение
Д 1ИН 1 УС ДУЛЯ ii ВЫ, СОСТОЯ:-:И11
ранно сумме .зыдвкже1и;й выдвгор ной (;екции 2 из корпуса 1 и второго тольал-епя 4 и:; Р ;щв1та;ной секции 2
т
;.(,;}, 4Ч Ксдция Г ЫХС ЛНого э,;;е:-;снта
/ в Л10 ;,.М требуемо - иоло:«ении осу- 1:;е:стпл;;1етс и с ч лючением i торможсшием i;i)MBo.aa,, напр -; -;ер с номощьк встроен- ; ;;j o тпргчсяа (le псказан),
во;; гфищс-ния вькодно; ;) ;олекента, 7 в игходвг ;- положение (фиг. у ие- обхо;;, огк;лочиТ ; тормоз (;1Дй. - ри г ;;д ,:;,ейстлием пртаин 3 и ., ico irpbic c/Kff -aroTc; i S Г р исхсдиг
c -i-ai bnj.THiie троса 13 с при,.:;:;нс ; о ба ;;1бана 8, а также ;чтя) Л1вание ннут - 1; еннсй вь: лнижнс;1: сек;;ии 2 в и толкателя к выдвижп ло ceKni- o 3. ;.ри втягив. лп-л; толкателей 3 и 4 Б
I е1)мет1- чнук; ; Ь;; н;;жную сгк;,,ик1 2 ; ермет чног1 выдв5-тж ой секг.ии 2 уме11;ь- К ается, давление возрастае . Избыточное ла зд; е};ие перекачивается мере;;- грубку i b /. ксмие1 сатор 7, который
i; icuuip;-ieTCP ло ч-ех пор, пока дав1; е-- пие в компенсаторе 17 и в герметичной выдвижной секции 2 уравновесится.
и 3 о б р е т
Модуль манипулятора 5 сог ержаший корпус., выдв ижную секцюо с двумя тол- , один из которьгх жестко сзя- я, ;н с icopnycoM, а другой - с выходным элементом, компенсатор, связанный с полостью выдвижной секции, и привод перемещения выходного элемента, размещенный в плоскости выдвижной секции и кинематически связанньй с толкателями, отличающийся тем, что, с целью повышения надежности при работе в агрессивных средах, привод перемещения выходного элемен- та выполнен в виде приводного барабана и трособлочной системы, блоки
которой попарно расположены на противоположных торцах выдвижной секции, причем один из блоков каждой па ры жестко связан с торцом вьщвижной секции, а другой блок каждой пары - соответствующим толкателем и подпружинен относительно торца вьщвижной секции, при этом трос одним концом связан с приводным барабаном, а другим концом закреплен на торце выдвижной секции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Выдвижное устройство для захвата и перемещения груза | 1987 |
|
SU1411270A1 |
| Модуль манипулятора | 1989 |
|
SU1710336A1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| Проходческий комбайн | 1978 |
|
SU881313A1 |
| Предохранительное устройство наклона конвейера | 1975 |
|
SU603621A1 |
| Манипулятор для установки и снятияАНТЕННыХ СЕКций | 1979 |
|
SU823535A1 |
| Грузозахватное устройство | 1984 |
|
SU1294745A1 |
| МОСТОВОЙ БЛОК МНОГОПРОЛЕТНОГО МОСТА И КАРЕТКА ПРИВОДА (ЕЕ ВАРИАНТЫ) | 1993 |
|
RU2057836C1 |
| Устройство для открывания раздвижных ворот | 1978 |
|
SU779566A1 |
| Телескопическое звено манипулятора | 1981 |
|
SU984860A1 |

Изобретение относится к машиностроению, а именно к конструкциям манипуляторов, работающих в агрессивных средах, например в морской воде. Целью изобретения является повышение надежности при работе в аг рессивнь:х средах. Привод перемещения выходного звена размещен в герметичней полости выдвижной секции 2 и выполнен п виде трособлочной системы. Блоки Г.; и 11 трособлочной системы жестко связаны с торцом корпуса вьщвижной секции 2, а блоки 9 и 12 жестко связаны с концами соответственно толкателей 3 и 4 и подпружинены посредством пружин 13 и 14 относительно торцов корпуса Быдви7«ной секции 2, Систему блоков 9, 10, 11 и 12 огибает гибкий элемент, например трос 15. Один конец троса 15 закреплен на торце вьщ-- вижной секции 2, а другой его конец связан с приводным барабаном 8. 3 ил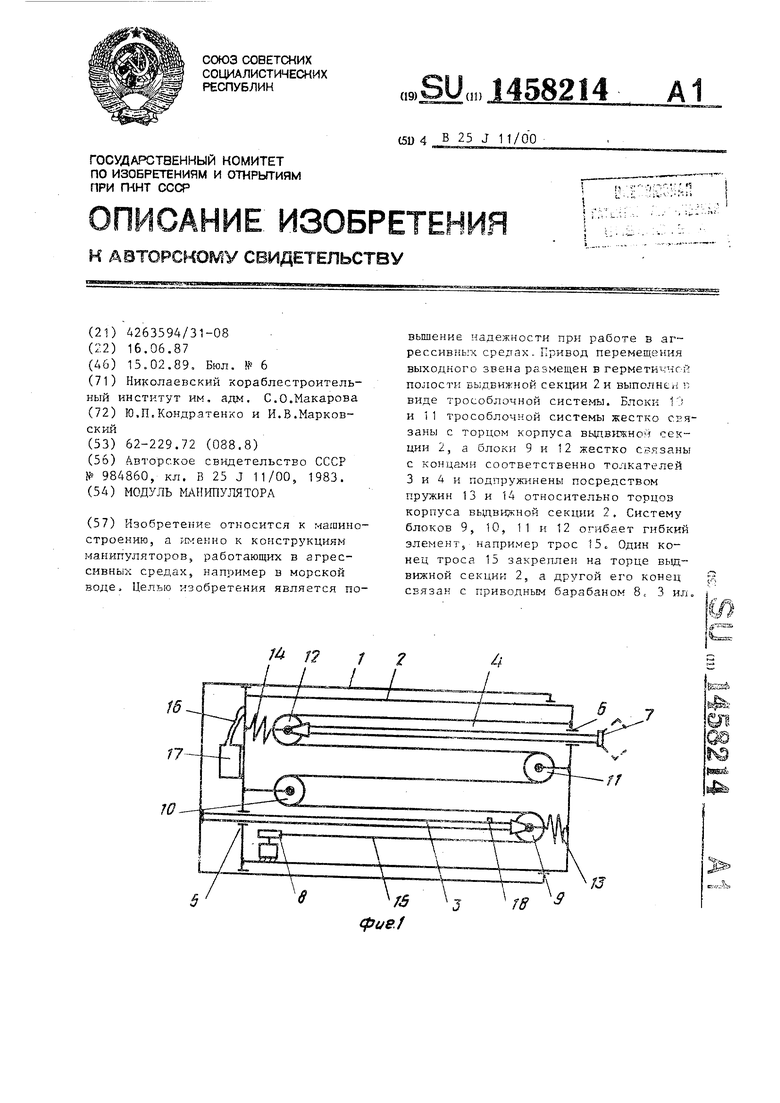
Г 72
J
1В
Фиг.г
13
фиг.З
| Телескопическое звено манипулятора | 1981 |
|
SU984860A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
