Изобретение относится к автоматике и может быть использовано как исполнительный элемент для прецизионных перемещений в делительных машинах для нарезания дифракционных решеток, а также в оптико- механических приборах.
Известны линейные пьезоэлектрические приводы малых перемещений, представляющиепоследовательностьпьезоэлектрических элементов, каждый, из которых состоит из пьезокерамической шайбы, помещенной между двумя металлическими прокладками-контактами. Соответствующие контакты элементов подключены параллельно к двум входным клеммам, связанным с выходом источника питания,: Недостатком данных пьезоприводов яв- .; ляется то, что они не обеспечивают однозначного соответствия рабочих перемещений подаваемому на клеммы привода напряжению. Это проявляется особенно заметно в тех случаях, когда привод применяется для выполнения прецизионных перемещений много меньших длины
G.
ы
световой волны, здесь точн ость его отработки оказывается недостаточной. Причиной этого являются дрейфовые процессы в пье- зокерамике, связанные, в свою очередь, с ориентацией ее структурных единиц (доменов) в электрическом поле. Согласно исследованиям дрейфовые смещения имеют экспоненциальный характер и их величина составляет 1-2% от величины рабочих-смещений пьезоэлектрического привода. Несмотря на их относительную малоетк они оказывают существенное влияние на точность деления в указанном режиме работы.
Наиболее близким к предлагаемому по технической сущности является пьезопри- вод, который содержит последовательность пьезоэлектрических элементов, закреп- ленных в корпусе/Каждый элемент включает в себя пьезокерамическую шайбу., заключенную между металлическими прокладками-контактами. Совокупность пьезоэлектрических элементов разделена на две секции: управления и обратной связи, с параллельным подключением контактов элементов каждой секции к соответствующей паре клемм. Входные клеммы управляющей секции связаны с выходом источника питания. Здесь элементы управляющей секции и секции обратной связи взаимосвязаны кинематически за счет установки их в общем корпусе. Сокращение элементов управляющей секции (при подаче на них управляющего напряжения) вызывает изменение нагрузки на элементы секции обратной связи: возникающий на клеммах этой секции сигнал может быть использован для регулирования напряжения, подаваемого на управляющую секцию с тем, чтобы обеспечить стабильность рабочих перемещений пьезопривода и их соответствие заданным значениям.
Недостатком данной конструкции привода является также малая точность отработки рабочих перемещений, связанная с неконтролируемыми дрейфовыми смещениями привода. Это обусловлено малостью изменений сигнала, снимаемого с секции обратной связи, возможностью утечки заряда, соответствующего этому сигналу. В результате возникающие в процессе дрейфа изменения контрольных напряжений лежат много ниже уровня шумов и не могут быть сформированы в качестве сигнала коррек- ц-ли, например, путем усиления или интегрирования. Поэтому при использовании данных приводов в делительной машине для изготовления дифракционных решеток с произвольно выбираемым шагом деления с переменным законом изменения шагз по
ширине решетки в качестве привода малых перемещений решетки-шкалы эти приводы обеспечивали точность перемещений 0,3-10 мкм. Для получения качественных
дифракционных решеток было необходимо уменьшить указанный допуск в 10-15 раз, условием этого было устранение указанного дрейфа.
Цель изобретения - повышение точности перемещений.
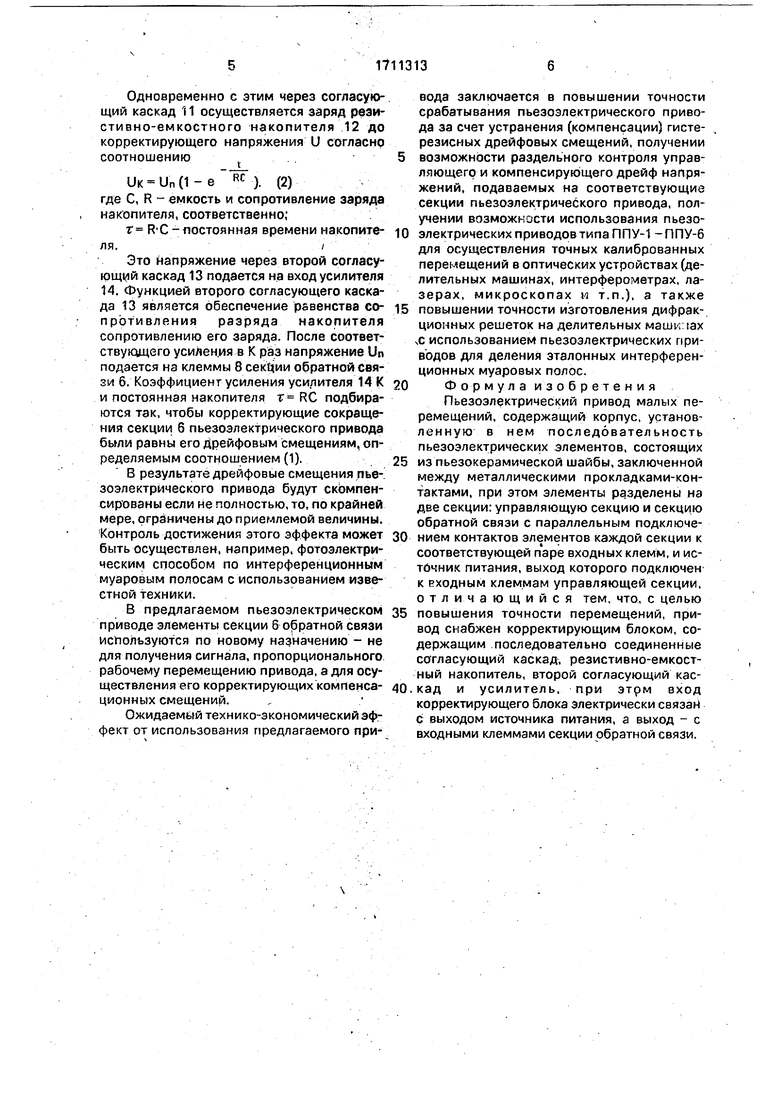
На чертеже представлена блок-схема привода малых перемещений.
Пьезоэлектрический привод содержит последовательность чередующихся шайб из
пьезокерамики 1 и металлических прокладок-контактов 2, закрепленных в пружин- номтиеталлическом корпусе 3 с крышкой 4 в торцовой части корпуса 3. Таким образом, каждый активный элемент пьезоэлектрического привода включает в себя шайбу из пьезокерамики 1, заключенную между двумя металлическими прокладками-контактами 2, Элементы привода разделены на две . секции: управляющую 5 и обргтной связи 6.
Соответствующие контакты элементов каждой из секций подключены параллельно к парным входным клеммам 7 и 8. Клеммы 7 управляющей секции 5 подключены к выходу источника 9 питания, к которому одновременно подсоединены вход корректирующего блока 10. включающего последовательно связанные согласующий каскад 11, резистивно-емкостный накопитель 12, второй согласующий каскад 13 и
усилитель 14, Выход корректирующего блока 10 (усилителя 14) подключен к входным клеммам 8 секции 6 обратной связи. В качестве источника 9 питания может быть использован, например, цифроаналоговый
преобразователь(ЦАП)ЭВМ. При использовании пьезоэлектрического привода один горец его, например торец 15, закрепляется на базовой поверхности, другой (подвижный) торец 16 сопрягается с перемещаемым
объектом 17.
Пьезоэлектрический привод работает следующим образом,
При подаче на клеммы 7 управляющего напряжения Un от источника 9 смещение
А/э торца 16 пьезоэлектрического привода определяется соотношением
Ap-aUnfbUn( ) (1) Здесь первый член соотношения опре- деляет рабочие перемещения, а второй - дрейфовые смещения; а и b - постоянные коэффициенты; t - время, текущее с момен- - та подачи напряжения Un; т- постоянная времени дрейфа.
Одновременно с этим через согласующий каскад 11 осуществляется заряд рези- стивно-емкостного накопителя 12 до корректирующего напряжения U согласнр соотношению .
UK-Un (1-е }. (2) где С, R - емкость и сопротивление заряда накопителя, соответственно;.
г R C - постоянная времени накопите- ля.;
Это напряжение через второй согласующий каскад 13 подается на вход усилителя 14. Функцией второго согласующего каскада 13 является обеспечение равенства со- противления разряда накопителя сопротивлению его заряда. После соответ- ствуюддего усиления в К раз напряжение Un подается на клеммы 8 секции обратной связи 6. Коэффициент усиления усилителя 14 К и постоянная накопителя т RC подбираются так, чтобы корректирующие сокращения секции б пьезоэлектрического привода были равны его Дрейфовым смещениям, определяемым соотношением (1).
В результате дрейфовые смещения пьезоэлектрического привода будут скомпенсированы если не полностью, то, по крайней мере, ограничены до приемлемой величины. Контроль достижения этого эффекта может быть осуществлен, например, фотоэлектрическим способом по интерференционным муаровым полосам с использованием известной т ехники.
В предлагаемом пьезоэлектрическом приводе элементы секции 6 обратной связи используются по новому назначению - не для получения сигнала, пропорционального рабочему перемещению привода, а для осуществления его корректирующих компенса- ционных смещений.
Ожидаемый технико-экономический эффект от использования предлагаемого привода заключается в повышении точности срабатывания пьезоэлектрического привода за счет устранения (компенсации) гисте- резисных дрейфовых смещений, получении возможности раздельного контроля управляющего и компенсирующего дрейф напряжений, подаваемых на соответствующие секции пьезоэлектрического привода, получении возможности использования пьезоэлектрических приводов типа ППУ-1 -ППУ-6 для осуществления точных калиброванных перемещений в оптических устройствах (делительных машинах, интерферометрах, лазерах, микроскопах м т.п.), а также повышении точности изготовления дифракционных решеток на делительных маши: tax х использованием пьезоэлектрических приводов для деления эталонных интерференционных муаровых полос.
Формула изобретения Пьезоэлектрический привод малых перемещений, содержащий корпус, установленную в нем последовательность пьезоэлектрических элементов, состоящих из пьезокерамической шайбы, заключенной между металлическими прокладками-контактами, при этом элементы разделены на две секции: управляющую секцию и секццю обратной связи с параллельным подключением контактов элементов каждой секции к соответствующей паре входных клемм, и источник питания, выход которого подключен к входным клеммам управляющей секции, отличающийся тем, что, с целью повышения точности перемещений, привод снабжен корректирующим блоком, содержащим последовательно соединенные согласующий каскад, резистивно-емкост- ный накопитель, второй согласующий каскад и усилитель, при этом вход корректирующего блока электрически связай с выходом источника питания, а выход - с входными клеммами секции обратной связи.
f
-16
-17

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом делительной машины | 1990 |
|
SU1775271A1 |
| Корректирующий усилитель сигнала развертки электронного луча | 1989 |
|
SU1672583A1 |
| Устройство управления приводом делительной машины | 1985 |
|
SU1280317A1 |
| УСТРОЙСТВО ВОЗБУЖДЕНИЯ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2363550C1 |
| ТЕЛЕФОННЫЙ АППАРАТ | 1992 |
|
RU2054811C1 |
| УСТРОЙСТВО ВОЗБУЖДЕНИЯ УЛЬТРАЗВУКОВЫХ ВОЛН | 2010 |
|
RU2456091C2 |
| Запоминающее устройство | 1976 |
|
SU597006A1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| АВТОГЕНЕРАТОРНАЯ СХЕМА ДЛЯ ВОЗБУЖДЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ТРАНСФОРМАТОРА | 2010 |
|
RU2453982C2 |
| Привод резцовой каретки делительной машины | 1990 |
|
SU1756114A1 |
Изобретение относится к области автоматики и может быть использовано в качестве пьезоэлектрического привода в, делительных машинах для изготовления дифракционных решеток. Изобретение повышает точность рабочих перемещений пьезоэлектрического привода за счет компенсации дрейфовых смещений и тем самым обеспечивает высокую точность изготовления дифракционных решеток ча делительных машинах с произвольно выбираемыми постоянными деления и с переменными постоянными по ширине решетки. Пьезоэлектрический привод малых перемещений содержит корпус, установленную в нем последовательность пьезоэлектрических элементов, состоящих из пьезокерамической шайбы, заключенной между металлическими прокладками-контактами, при этом элементы разделены на две секции: управляющую и обратной связи с параллельным подключением контактов элементов каждой секции к соответствующей паре клемм и источник питания, выход которого подключен к входным клеммам управляющей секции. Привод снабжен корректирующим блоком, содержащим последовательно соединенные согласующий каскад, резистивно-емкостный накопитель, второй согласующий каскад и усилитель, при этом вход блока электрически связан с выходом источника питания, а выход - с входными клеммами секции обратной связи. 1 ил. с SO ел с
| Джагупов Р.Г,, Ерофеев А.А | |||
| Пьезокера- кическиё элементы в приборостроении и автоматике | |||
| - Л.: Машиностроение, 1986, с | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Заявка ФРГ №3103061, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
