Изобретение относится к технике для m&mf,OuSHViia скважин приборами на кабещш может быть использовано в геофизичеа|Й anndpiaType и в машиностроении, в с программным управлением для у ф цявшАя различйыми исполнительными «и хаймзнаки (клапанами гидpocl4Ct«N, ftTieaitit MH и вытяжными механизмвм з Ш1Е1р1Мескими контактами, револьвермы 1Ш шпаками станков и т.д.).
Известен переключательгидросистемы ел сввжинного прибора, содержащий KOfHtyc с каналами и поршнем гидросистемы, рас положенную на поршне втулку с замк11уты ИИ пазами переменной глубины, подпружи14в нную относительно корпуса, поворотный распределитель, связанный с втулкой лодгфужиненным толкателем.
Недостатки устройства следующие. Область применения переключателя ограничена гидросистемами, где устройство выполняет чисто распределительные функции. Отсутствие обратной связи в устройстве усложняет оперативный контроль прибора в целом, хотя он и возможен. Для реализации поступательного движения поршня в устройстве необходим преобразовавтель движения, в данном случае не используются все его возможности. Изготовление втулки С замкнутыми пазами переменной глубины достаточно сложно и дорого..
Известно также устройство для исследования и отбора проб горных пород содержащее электродвигатель с редуктором, преобразующий кулачковый механизм, содержащий обойму с внешними упорами и кулачок, опорные плоскости, поршень со штоком, на котор4 1й посажена притертая шайба с пазами и т.д. В устройстве используется вращение преобразующего кулачкового механизма с обоймой для попеременг ного включения двух напорных линий, связанных с различными исполнительными механизмами.
Устройство имеет следующие недостатки. Распределитель выполнен в виде притертой шайбы только двухпозиционный и для увеличения количества управляемых звеньев необходимы дополнительные средства. Распределительный узел в устройстве представлен притертой парой для увелймения количества управляемых звеньев необходимы дополнительные средства. Распределительный узел в устройстве представлен притертой парой ,для обеспечения герметичности гидросистемы.- это усложняет изготовление и эксплуатацию узла (взаимозаменяемость, ремонтопригодность). Ручное управление приводом (включение, выключение, реверс) и прибором в целом производится не по факту срабатывания механизма, а по косвенным признакам, например по повышению давления в гидросистеме, это усложняет работу оператора и засоряет геофизический материал, получаемый при помощи датчика давления.
Цель изобретения - расширение функциональных возможностей привода, повышение надежности и улучшения условий его эксплуатации.
Для достижения цели устройство для управления исполнительными механизмами скважинногЪ прибора, содержащее корпус, в котором расположены реверсивный электропривод с блоком управления и обратной связью,кбпир, выполненный в виде втулки с пазами и связанный через винтовую пару с электроприводами и выходным управляющим звеном, фиксатор, установленный для взаимодействия с копиром, снабжено храповыми шайбами, скрепленными с копиром, а фиксатор выполнен в виде подпружиненното контакта, включенного в цепь обратной связи.
В устройстве достигается возможность получить любой ход выходного управляющего звена винтовой пары, поворот его на любой угол, а также сложное движение в последовательности, задаваемой блоком управления: кроме того, достигаются мягкие условия работы электродвигателя.
Известны аналогичные устройства с использован11ем преобразователя движения типа винтовойпары.
Существенным недостатком их является то, что выходное звено винтовой пары, связанное с поршнем (штоком, штангой и т.д.), в крайних положениях работает в упор.
Это вынуждает использовать различные демифирующие или. амортизирующие углы, причем здесь неизбежны перегрузки как в кинематической цепи привода, так и в электрической, использование концевых выклю0 чателей или датчиков хода, решая задачу
своевременного останоЁа привода, услож, няет конструкцию (имея ввиду, что их всегда
два и более) и не всегда обеспечивает безынерционность выходного звена, т.е. проблема оптимизации условий работы привода решается не в полной мере.
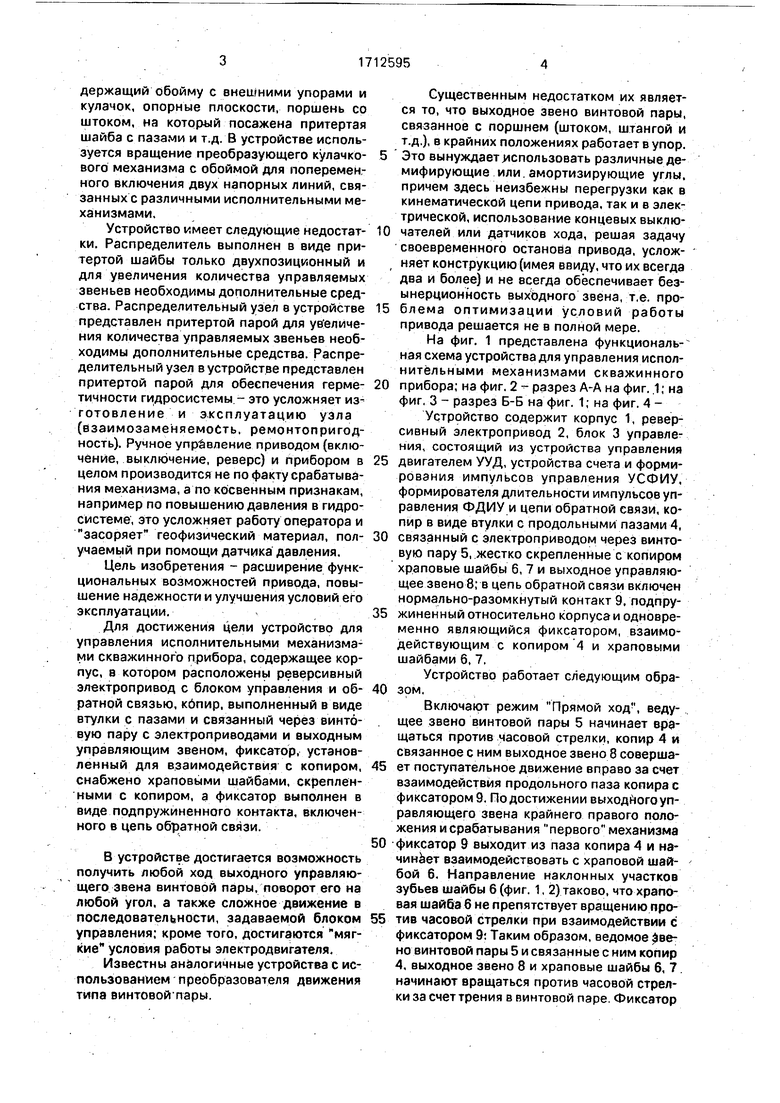
На фиг. 1 представлена функциональная схема устройства для управления исполнительными механизмами скважинного
0 прибора; на фиг. 2 - разрез А-А на фиг. .1; на фиг. 3 - разрез Б-Б на фиг. 1,- на фиг. 4 Устройство содержит корпус 1, реверсивный электропривод 2, блок 3 управления, состоящий из устройства управления
5 двигателем УУД, устройства счета и формирования импульсов управления УСФИУ, формирователя длительности импульсов управления ФДИУ и цепи обратной связи, копир в виде втулки с продольными пазами 4,
0 связанный с электроприводом через винтовую пару 5, жестко скрепленные с копиром храповые шайбы 6, 7 и выходное управляющее звено 8: в цепь обратной связи включен нормально-разомкнутый контакт 9, подпружиненный относительно корпуса и одновременно являющийся фиксатором, взаимодействующим с копиром 4 и храповыми шайбами б, 7.
Устройство работает следующим обра0 зом.
Включают режим Прямой ход, ведущее звено винтовой пары 5 начинает вращаться против часовой стрелки, копир 4 и связанное с ним выходное звено 8 совершает поступательное движение вправо за счет взаимодействия продольного паза копира с фиксатором 9. По достижении выходйого управляющего звена крайнего правого положения и срабатывания первого механизма
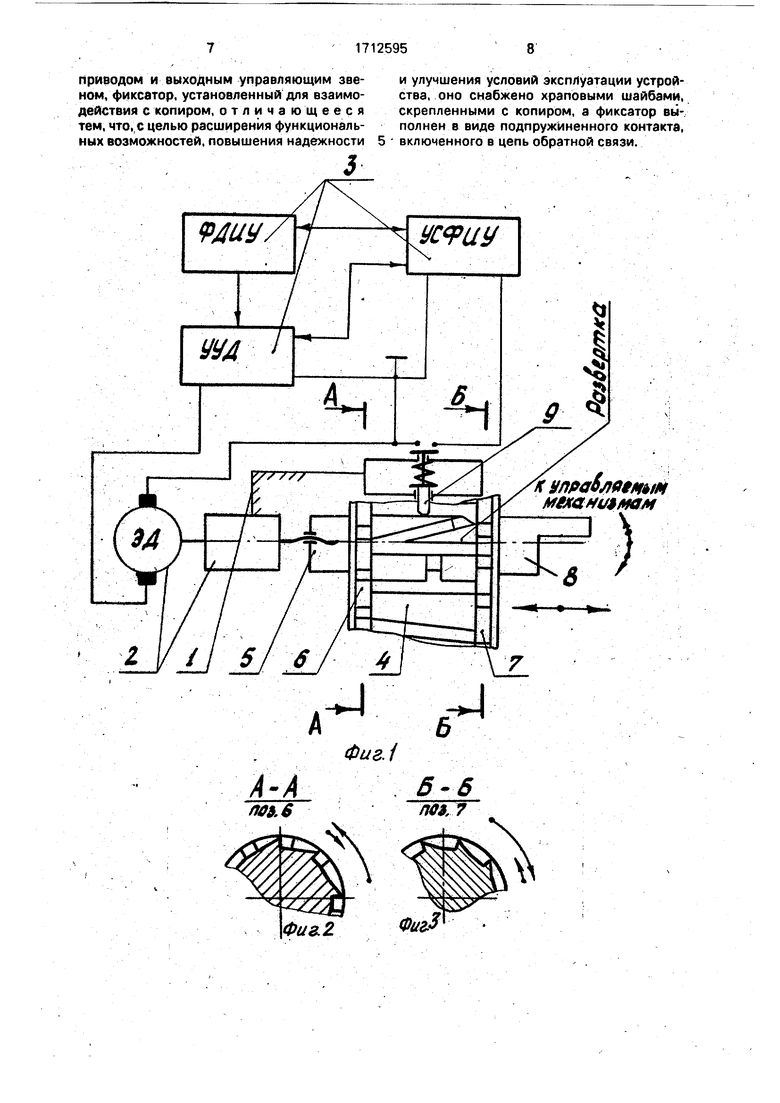
0 фиксатор 9 выходит из паза копира 4 и начинЬет взаимодействовать с храповой шайбой 6. Направление наклонных участков зубьев шайбы 6 (фиг. 1,12) таково, что храповая шайба 6 не препятствует вращению против часовой стрелки при взаимодействии с фиксатором 9: Таким образом, ведомое вено винтовой пары 5 и связанные с ним копир 4, выходное звено 8 и храповые шайбы 6, 7. начинают вращаться против часовой стрелки за счет трения в винтовой паре. Фиксатор
9, взаимодействуя с наклонными участками зубьев храповой шайбы 6, замыкает и размыкает контакт обратной связи блока 3 управления. Эти сигналы фиксируются УСФИУ, который вырабатывает командына УУД и ФДИУ, ричем в. зависимости от числа и длительности замыканий, УУД производит торможение и останов электродвигателя замыканием обмотки на себя; а ФДИУ пуск или реверс злектродвигателя через определенный интервал времени, нет обходимый для торможения электропривода 2 и срабатывания исполнительного механизма. После отработки командуправ.ления и включения электропривода в му)к,ный режим в УУД формируется сигнал, rto которому при дальнейшей работе устройства, УСФИУ выдаст команды на ФДИУ и УУД только после определенных чисел и длительности замыканий цепи обратной связи. В крайнем левом положении выходного звена 8 (вращение электропривода по часовой стрелке) фиксатор 9 взаимодействует с храповой шайбой 7 (фиг. 3), направление наклонных участков з.убьев которой противоположно шайбе б и не препятствует вращению по часовой стрелке. Работа устройства в данном случае аналогична указанной. Для пблучения более сложного движения выходного звена копир 4 может быть получен из набора храповых шайб с продольными пэзами.i
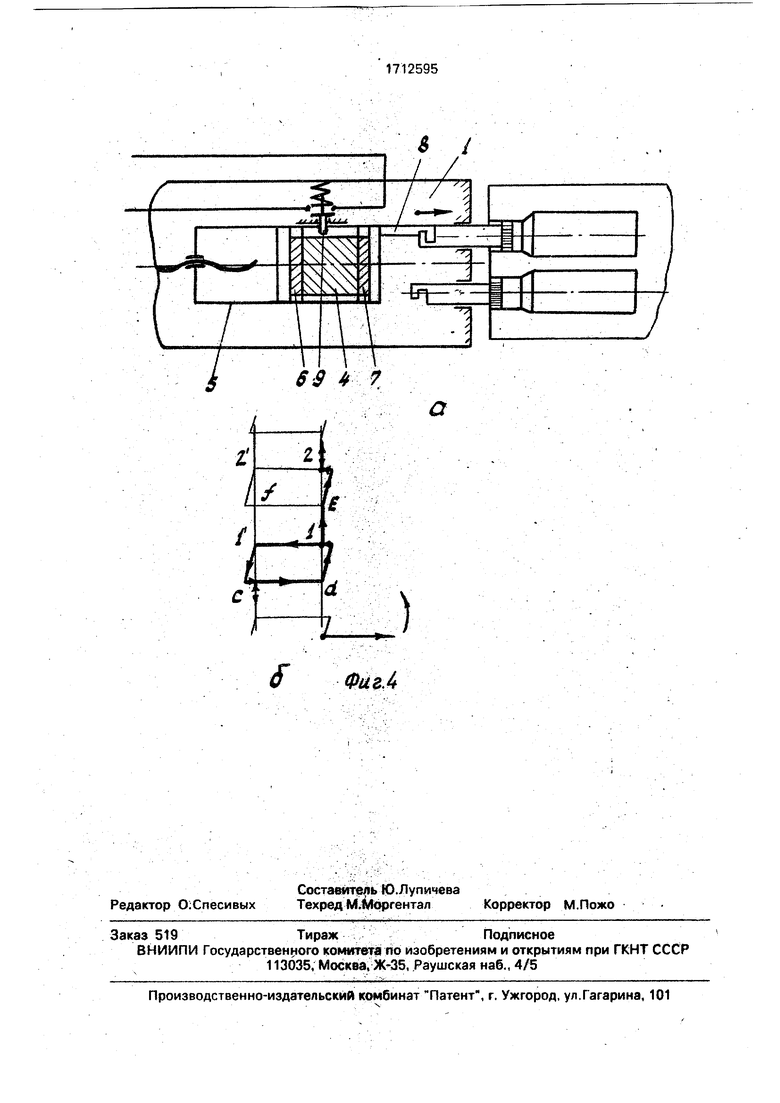
Рассмотрим схему управления ПробоСборниками скважинного прибора (фиг. 4 а): Схема состоит из корпуса 1, выходного звена 8, винтовой пары 5. с которой жестко связана втулка с продольными пазами и храповые шайбы 6, 7, с которыми взаимодействует фиксатор 9.: ;
:
На фиг. 4 б показана схема обращенного движения фиксатора по копиру, где цифрами 1 и 2 условно обозначены первый и второй клапаны пробосборников. При вкл10чении привода ведущее звено винтовой пары начинает вращение против часовой стрелки и фиксатор 9 начинает двигаться йЗ; точки 1 в точку 1 (выходное звено 8 при atoM выдвигается). Далее фиксатор 9 входит вО взаимодействие с храповой шайбой 6 и, двигаясь к точке С по зубу шайбы 6, замЫ кает контакты устройства счета и форми}Эвания импульсов управления (см. фиг. 1), формируется сигнал на торможение, который подается в устройство управления эяектродвигателем (УУД), электропривод тормозится. В этот же момент сигнал из УСФИУ поступает в ФДИУ. где двигатель реверсируется через время t. необходимое
для его торможения и заполнения емкости пробосборника.
УУД же выдает сигнал УСФИУ, по которому оно в дальнейшем выдаст сигнал на УУД 1 и ФДИУ только после второго замыкания контакта.
Фиксатор возвращается к точке С (фиг. 4 б), но вращению препятствует упор звена, поэтому он движется к точке d (выходное звено при этом выдвигается). При движении фиксатора по траектории d-1-E-2 происходит поворот выходнОго вена (точка 2 соответсдвует следующему клапану), второе замывание фиксируется УСФИУ (фиг. 1) и происходит торможение двигателя, включение реверса и УУД выдает сигнал УСФИУ, по которому оно выдаст сигнал сразу после первого замыкания контакта. В дальнейшем цикл работы устройства повторяется.
Расширение функциональных возможностей привода достигается использованием возможности проворота винтовой пары для переключения режимов работы привода. Устройство позволяет получить любой ход выходного управляющего звена винтовой пары, поворот его на любой угол, а также сложное движение в последовйтельности. задаваемой блоком управления устройства, отсюда расширение области применения устройства.
Повышение надежности достигается тем, что в качестве устройства для замыкания контакта обратной связи используется фиксатор от проворота выходного звена, причем достаточно одного контакта.
Условия работы электродвигателя в данном случае никогда не превысят нормальных, например в конечных.положениях хода выходного звена фиксатор попадает в поперечные канавки копира и выходное звено может свободно вращаться вместе с ведущим. в случае же заклинивания какого-либо из исполнительных механизмов при поступательном движении выходного звена в промежуточном положении предусматривается фиксация перегрузки п.о току электродвигателя в УУД и двигатель либо останавливается, либо выдается сигнал в УСФИУ для перевода системы в работу на следующий механизм, т.е. достигаются мягкие условия работы электродвигателя.
Формулаизо б р е т е и и я Устройство для управления исполнительными механизмами скважинного прибора, содержащее корпус, в котором расположены реверсивный электропривод с блоком управления и обратной связью, копир, выполненный в виде втулки С пазами и связанный через винтовую пару с электроприводом и выходным управляющим звеном, фиксатор, установленный для взаимодействия с копиром, отличающееся тем, что, с целью расширения функциональных возможностей, повышения надежности
А-А
по9.6
Фив,2
и улучшения условий эксплуатации устройства, оно снабжено храповыми шайбами, скрепленными с копиром, а фиксатор Bbi-, полнен в виде подпружиненного контакта, включенного в цепь обратной связи.
y/Jftfff fffmifl
Mfftaffu fOM
П09,7
Фиг.3
сГ

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| Коммутатор на магнитоуправляемых контактах | 1976 |
|
SU736206A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| ЦЕНТРОБЕЖНЫЙ РАСФИКСАТОР | 2009 |
|
RU2395713C1 |
| Устройство для автоматической сборки катушки с сердечниками | 1985 |
|
SU1255356A1 |
| НАТЯЖНОЕ УСТРОЙСТВО | 2000 |
|
RU2191938C2 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Ленточно-шлифовальный станок | 1980 |
|
SU975348A2 |
Изобретение относится к исследованию скважин приборами на кабеле, к станкам с программным управлением. Цель - расширение функциональных возможностей, повышение надежности и улучшение условий эксплуатации устройства.-Выходное звено совершает поступательное движение за счет взаимодействия продольного паза копира с фиксатором. При достижении выходным звеном крайнего привода правого положения срабатывает механизм. Фиксатор выходит из паза копира и взаг1модейст- вует с храповой шайбой, замыкая и размыкая контакт обратной Связи блока управления. В зависимости от числа и длительности зам1^каний производятся торможение, реверс или останов электродвигателя. 4 ил.•
| Контактный аппарат для окисления диоксида серы в трехокись серы | 1988 |
|
SU1579554A2 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Устройство для исследования и отбора проб горных пород | 1985 |
|
SU1268718A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
