1
Изобретение относится к области электротехники и предназначено для коммутации электрических цепей в заданной последовате.тьности. Оно может быть использовано в скважинной геофизической аппаратуре.
Известен коммутатор на магнитоуправляемых контактах (м.к.) в котором м.к. расположены в статоре по образующей цилиндра, управляющие постоянные магниты размещены на поворотном роторе, фиксирующий механизм выполнен в виде постоянного матнита, перемещаемого на оси коммутатора. В таком коммутаторе поворот ротора зависит от положения постоянного магнита фикс1фующего механизма 1. Функциональные возможности коммутатора ограничены из-за невозможности изменения положения ротора без его непосредственного перемещения вдоль оси коммутатора.
Известен также коммутатор на м.к., содержащий статор с расположенными по образующей цилиндра М.К., ротор с установленнь ми на нем параллельно осям м.к. магнитами и подпружиненный в направлении оси ротора фиксатор с направляюпщм механизмом и двумя механизмами зацепления, размеп1енными на торцах ротора и представляющими собой кинематические пары в виде храповых колес 2.
Такой коммутатор имеет ограниченные функциональные возможности из-за того, что в процессе работы он не обеспечивает изменения шага вра1цения ротора при поступательном перемещении или вращении направляюп его механизма фиксатора.
Целью изобретения является расщирение функциональных возможностей коммутатора.
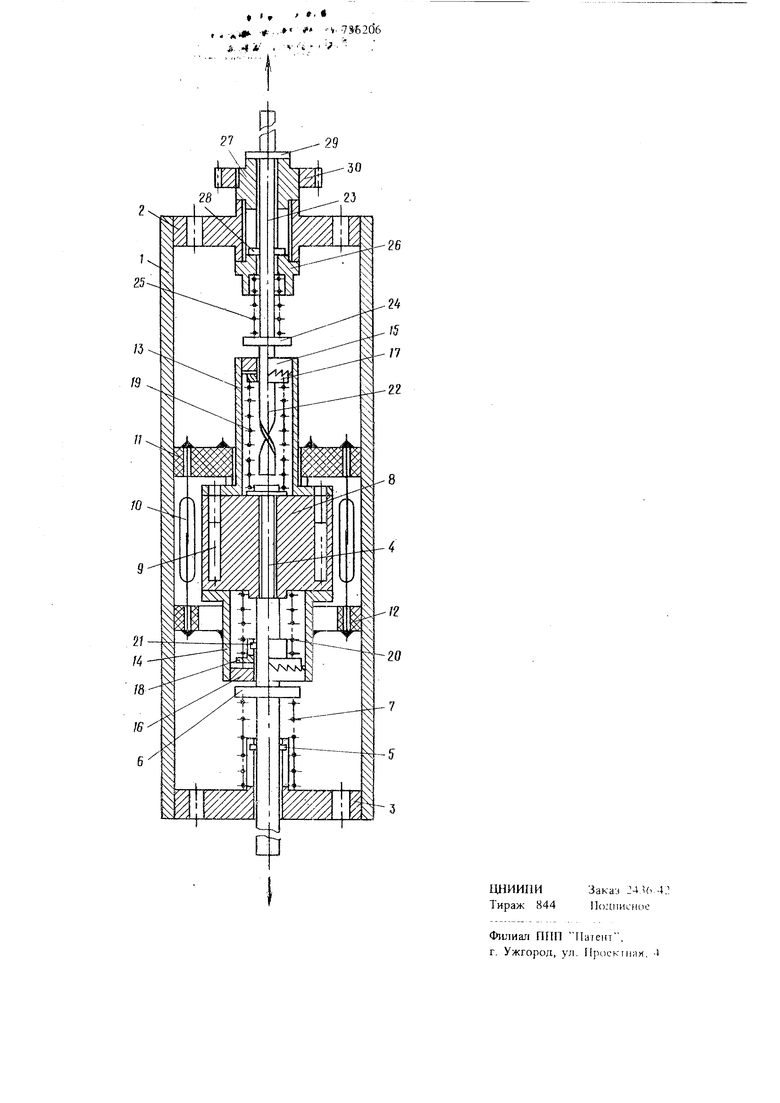
Это достигается тем, что предложенный коммутатор на М.К., содержащий статор с расположенными по образующей цилиндра м.к., ротор с установленными на нем параллельно осям м.к. магнитами, подпружиненный в направлении оси коммутатора фиксатор с направляющим механизмом и двумя механизмами зацепления, установленными по торцам ротора и представляющими собой кинематические пары в виде храповых колес, снабжен полым валом, указанные механизмы зацепления зафиксированы один относительно пружинами, образуя одноподвижную поступательную кинематическую пару, а направляющий механизм выполнен в виде винтовой подпружиненной оси и установленного на ней дополнительного храпо)зого колеса и прорезью, причем винтовая подпружиненная ось направляющего механизма размещена внутри полого вала и образуют с ним дополнительную поступательную кинемати. ческую пару. На чертеже схематически изображен предложенный коммутатор на м.к. продольный разрез. Коммутатор состоит из статора, образуемого далиндром 1 и .крышкаьда 2 и 3. Крышка 3 выполнена в виде втулки с фланцем, причем по образующим предусмотрены две диаметрально противоположные прорези. Во Втулке крышки 3 размещена подвижная ось 4 ротора, образующая одноподвижную поступатель ную кинематическую пару с направляющими сухарями 5. Ось 4 при riOMomii жестко связанного с ней фланца 6 подпружинена относитетьно крыщки 3 пружиной 7. На оси 4 с возможностью вращательного движения установлен ротор 8, в пазах которого расположены постоянные магниты 9. М.к. 10 установлены по образующей цилитщра I статора на электроязоляционных платах 11 и 12, жестко соедннегаы с цилиндром 1. К торцовым поверхностям ротора 8 жестко присоединены полые цилиндры 13 и 14, с которыми жестко связаны храповы колеса соответственно 15 и 16, образуюгцие с дополнительным храповым колесом 17 и х раповым колесом 18 два механизма зацепления. Зацепление храповых колес 15 и 17, 16 и 18 обеспечивается фиксатором, в который, входят пружины 19 и 20. Храповые колеса 15 и 16 имеют одинаковое количество зубьев, а храповые колеса 17 и 18 могут иметь меньщее количество зубьев. При этом боковые (рабочие) поверхности зубьев 15 и 16 направлены в одну сторону, так что находящиеся в зацеплении с ними храповые колеса 17 и 18 могут проскальзывать по торцовым поверхностям упомянутых колес по часовой стрелке. Храповые колеса 16 и 18 имеют осевые шлиндрические отверстия для свободного размещения в них оси 4. Ось 4 с храповым колесом 18 и сухарями 21 образует одноподвижную поступательную кинематическую пару. Хра повое колесо 15 имеет осевое дилиндриг1еское отверстие для свободного размещения в нем направляющего механизма, который выполнен в виде винтовой оси 22 и храпового колеса 17 имеющего в центре прорезь, в которую входит винтовая ось 22 направляющего механизма. Винтовая ось 22 выполнена в виде штопорообразной пластины, имеющей в верхней части плоский участок, и образует с храповым колесом 17 допол 1ительиую поступательную кинематй юскую пару. Винтовая ось 22 жестко свЯза-, на с осью 23 и отделена от нее фланцем 24. Ось 23 подпружинена пружиной 25 относительно полого вала, выполненного из сочленных втулок 26 и 27, размешенных в осевом отверстии крышки 2 с возможностью вращательного движения. Ось 23 с сухарями.28 и направляюпдам механизмом образует с полым валом одноподзиж зую поступательную кинематическую нару. Поступательное перемещение оси 23 под действием пружины 25 ограничено фланцем 29. Ддя обеспечения работоспособности ком.мутатора а также для передачи шагового вращате.11ьного движения полому валу от ггр}гвода (не показан) вал снабжен колесом 30, например зубчатым 1ши храповым, жестко соединенным со втулкой 27. Кроме того, вал через колесо 30 фиксирован относительно крышки 2 рлеханизмом указанного привода или должен быть снабжен дополнительным фиксатором. В исходном состоянии коммутатора (см. чертеж) м.к. 10, против которых установлены постоянные магниты 9 ротора 8, замкнуты, При перемещеш1И оси 4 до упора по направляющим ротор 8, вследствие перемещения дополнительного храпового колеса 17 по плоскощ- участку винтовой оси 22, сохраняет свое положение относительно оси 4 и размыкает М.К. 10. После прекращения воздействия на ось 4 ротор 8 под действием пружины 7 возвращается в исходное положение, замыкая при помощи постоянных магнитов 9 те же м.к. 10. Таким образом, в данном случае коммутатор выполняет логическую операидю НЕТ, где блокирующим элементом является прямолю1ейный yijacTOK винтовой оси 22. В случае перемещения оси 23 в направлении, показанном на чертеже стрелкой, на величину, соответствующую требуемому шагу вращения ротора, последний при воздействии на ось 4 храпового колеса 17, перемещающегося некоторое время по плоскому участку винтовой оси 22, сохраняет свое положение относительно оси 4 по крайней мере до момента размыкания м.к., находящихся в исходной позиции. Затем, перемещаясь далее по винтовой оси 22, храповое колесо 17, находясь 3 зацеплении с храповым колесом 15, перемещает ротор 8 против часовой стрелки в следующую познидю. Пр}гчем при вращении ротора 8 храповое } олесо 18, прижимая пружину 20, проскальзывает по храповому колесу 16. После прекращения воздействия на ось 4 ротор 8 под действием пружины 7 перемещается возвратно-поступательно, не вращаясь, и занимает новое исходное положение, замыкая
при этом постоянными магнитами 9 соответствующие м.к. Причем при возвратном перемещении ротора 8 храповое колесо 17, перемещаясь по винтовой оси 22, прижимает пружину 19 и проскальзывает по храповому колесу 15. Очевидно, для данного режима управления м.к. величина шага вращения ротора 8 находится в прямой функциональной зависимости от величины перемещения оси 22. Это позволяет обеспечить выборочное управление м.к. 10 без срабатывания М.К., расположенных в промежуточных позищ1ях.
Управление работой м.к. в коммутаторе может быть осуществлено также вращением колеса 30 или оси 23 против часовой стрелки.
Вращательное движение колеса 30 передается винтовой оси 22, которая через храповое колесо 17, находящееся в задеплении с храповым колесом 15, вращает ротор 8, постоянные магниты 9 которого обеспечивают поочередное замыкание м.к. При этом храповое колесо 18, прижимая пружину 20, проскальзывает по храповому колесу 16. При вращении колеса 30 по часовой стрелке pojop 8 сохраняет свое положение относительно оси 4 вследствие того, что храповые колеса 16 и 18 находятся в зацеплении, а храповое колесо 17, прижимая пружину. 19, проскальзывает по храповому колесу 15. Передача вращательного движения от винтовой оси 22 ротору 8 может быть осуществлена при фиксации оси 4 в любой точке интервала, органичивающего ее перемещение. Очевидно, что при периодическом перемещении оси 4 до упора с некоторой постоянной скоростью и при одновременном вращении колеса 30 против часовой стрелки происходящее периодическое замыкание м.к. в той или иной позиции, позволяет судить об изменении угловой скорости колеса 30. При достижении колесом 30 некоторой критической угловой скорости, равной или больщей угловой скорости храпового колеса 17, в момент перемещения его по винтовой оси 22, ротор 8 соверщает возвратно-поступательное перемещение периодически замыкания м.к., находящиеся в исходном положении.
Таким образом, предложенный коммутатор позволяет реализовать некоторые функции запретноразрещающих блокировочных устройств, может найти применеш1е в систем 1х автоматического контроля в качестве датчиков линейного перемещения и угловой скорости, а также может быть использшан в скважинной геофизической аппаратуре, в которой необходимо одновременно обеспечить силовое управление исполнительными механизмами и KOMMJтировать электрические цепи с разрывом в момент переключения.
Формула изобретения
15
Коммутатор на магнитоуправляемых контактах, содержащий статор с расположенными по образующей цилиндра магнитоуправляемыми контактами, ротор с установленными на нем параллельно осям магнитоуправляемых контактов магнитами, подпружиненный в направлении оси коммутатора, фиксатор с направляющим механизмом и двумя механизмами зацепления, установленными по торцам ротора и представляющими собой кинематические пары в виде храповых колес, отличающийс я тем, что, с целью расширения функциональных возможностей, коммутатор снабжен полым валом, указанные механизмы зацепления зафиксированы один относительно другого пружинами, образуя одноподвижнуто поступательную кинематическую пару, а направляющий механизм выполнен в виде винтовой подпружиненной оси и установленного на ней дополнительного храпового колеса с прорезью, причем винтовая подпружиненная ось направляющего механизма размещена, внутри полого вала и образует с ним упругую поступатгльн то кинематическую пару.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 501429, кл. Н 01-Н 36/00, 1974.
2. Авторское свидетельство СССР № 339985, кл. Н 01 Н 67/30, 1973 (прототип);
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1102914A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ КОНЦЕНТРАТОРОВ НАПРЯЖЕНИЯ В СТЕНКАХ КОРПУСОВ ЯДЕРНЫХ РЕАКТОРОВ | 1988 |
|
SU1581079A1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| УСТРОЙСТВО И СПОСОБ РАБОТЫ ПРИВОДА УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2013 |
|
RU2535771C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО ВСПОМОГАТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2294299C2 |
| Устройство для загрузки плоских изделий,преимущественно заготовок радиодеталей | 1985 |
|
SU1307619A1 |
| Коммутатор | 1979 |
|
SU849328A1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С УСТРОЙСТВОМ ДЛЯ ОБЕСПЕЧЕНИЯ ЕЕ ХОДА | 2011 |
|
RU2479462C1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |