Изобретение относится к способам, реализуемым при работе виброзащитной техники, и может использоваться в транспортном машиностроении, например, для защиты человека-оператора от действия случайных колебаний.
Известен способ защиты объектов от вибрации, заключающийся в том, что отслеживают и фиксируют направление взаимного смещения объекта и основания, при фиксировании промежутков времени их взаимного сближения включают в работу демпфирующее устройство, а при фиксировании промежутков времени их взаимного удаления выключают из работы демпфирующее устройство 1.
В процессе реализации данного способа возможны ситуации, когда объект и основание взаимно сближаются, их скорости совпадают по направлению, а скорость основания больше скорости объекта. Это приводит .к тому, что при включенном в работу демпфирующем устройстве, диссйпативные силы подталкивают объект и увеличивают его скорость.
Кроме того, выключение из работы демпфирующего устройства в промежутках времени, когда объект и основание взаимно удаляются, нецелесообразно, так как отсутствие диссипативных сил не позволяет эффективно уменьшать скорость объекта.
Наиболее близким к предлагаемому относится способ защиты объектов от вибрации, заключающийся в том, что отслеживают скорость объекта и периодически изменяют вязкое сопротивление демпфирующего устройства 2.
Корректировка движения объекта за счет диссипативных сил при постоянно включенном в работу демпфирующем устройстве и отсутствии информации о движении основания малоэффективна, поскольку диссипативные силы, воздействующие на объект, зависят от направления и величины скорости основания. Так, скорость объекта будет увеличиваться в промежутках времени, когда объект и основание движутся в одном направлении при скорости основания, большей скорости объекта, причем увеличение скорости объекта будет тем больше, чем больше вязкое сопротивление демпфирующего устройства.
С другой стороны, увеличение вязкого сопротивления при движении объекта и основания в разных направлениях может оказаться неоптимальным по причине передачи на объект дополнительных динамических нагрузок ударного типа в начальный момент, когда относительная скорость отлична от нуля.
Также неоптимально и уменьшение вязкого сопротивления при движении объекта и основания в одном направлении, когда скорость объекта больше скорости основания, поскольку при малой относительной скорости (объект обгоняет основание) обеспечить необходимые для торможения объекта диссипативные силы можно только при большом вязком сопротивлении демпфирующего устройства. Все это снижает эффективность виброзащиты при реализации данного способа.
Целью изобретения является повышение эффективности виброзащиты за счет уменьшения скорости объекта.
Поставленная цель достигается тем, что в способе защиты объектов от вибрации, включающем операции отслеживания скорости объекта и периодического изменения вязкого сопротивления демпфирующего устройства, дополнительно отслеживают скорость основания, сравнивают ее со скоростью объекта по величине и направлению, фиксируют промежутки времени движения объекта и основания в одном направлении и при скорости объекта, большей скорости основания, увеличивают вязкое сопротивление демпфирующего устройства, а при меньшей - выключают его, при фиксировании промежутков времени движения объекта и основания в разных направлениях уменьшают вязкое сопротивление демпфирующего устройства.
В предлагаемом способе отслеживают скорости объекта и основания, сравнивают эти скорости по направлению и величине, фиксируют промежутки времени движения объекта и основания с одном направлении и при скорости объекта, большей скорости основания, увеличивают вязкое сопротивление демпфирующего устройства, а при меньшей - выключают его, при фиксировании промежутков времени движения объекта и основания в разных направлениях уменьшают вязкое сопротивление демпфирующего устойства.
На чертеже изображена схема амортизатора, который позволяет реализовать предлагаемый способ.
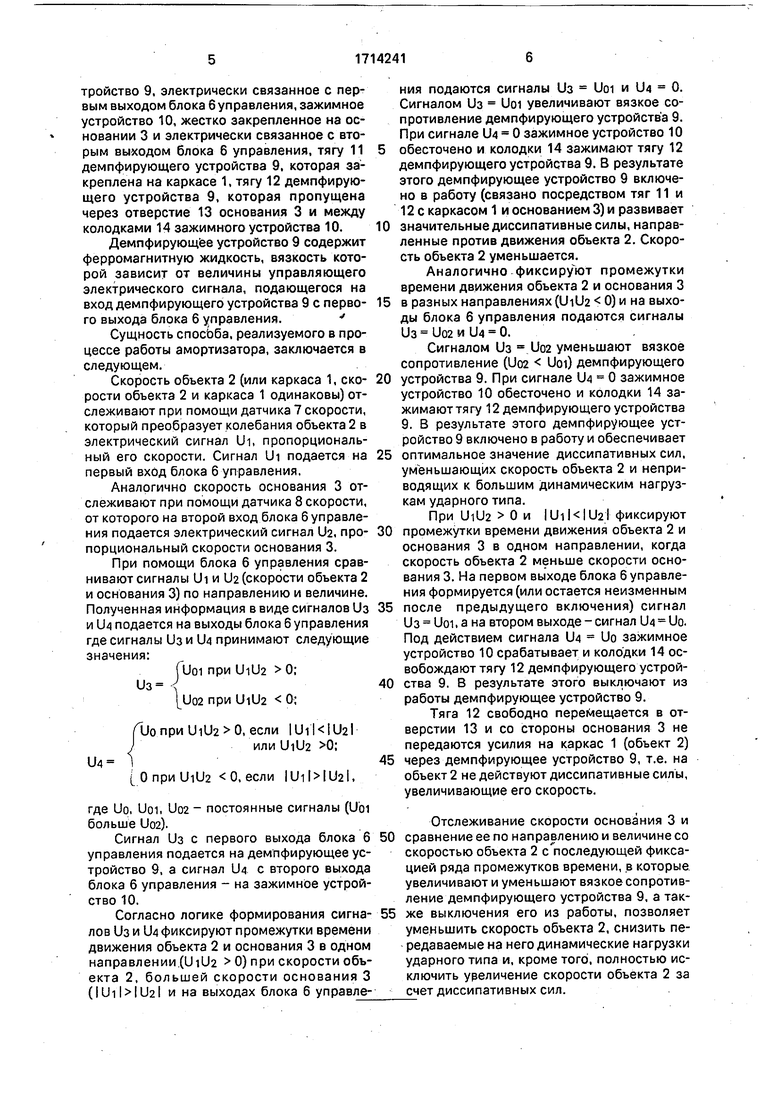
Амортизатор содержит каркас 1, на котором крепится объект2, основание 3, предназначенное для связи с источником 4 вибрации, упругий элемент 5, закрепленный между каркасом 1 и основанием 3, блок 6 управления, датчик 7 скорости, закрепленный на каркасе 1 и электрически связанный с первым входом блока 6 управления, датчик 8 скорости, закрепленный на основании 3 и электрически связанный с вторым входом блока 6 управления, демпфирующее устройство 9, электрически связанное с первым выходом блока б управления, зажимное устройство 10, жестко закрепленное на основании 3 и электрически связанное с вторым выходом блока 6 управления, тягу 11 демпфирующего устройства 9, которая закреплена на каркасе 1, тягу 12 демпфирующего устройства 9, которая пропущена через отверстие 13 основания 3 и между колодками 14 зажимного устройства 10. Демпфирующее устройство 9 содержит ферромагнитную жидкость, вязкость которой зависит от величины управляющего электрического сигнала, подающегося на вход демпфирующего устройства 9 с первого выхода блока 6 управления. Сущность спосЬба, реализуемого в процессе работы амортизатора, заключается в следующем. Скорость объекта 2 (или каркаса 1, скорости объекта 2 и каркаса 1 одинаковы) отслеживают при помощи датчика 7 скорости, который преобразует колебания объекта 2 в электрический сигнал Ui, пропорциональный его скорости. Сигнал Ui подается на первый вход блока 6 управления. Аналогично скорость основания 3 отслеживают при помощи датчика 8 скорости, от которого на второй вход блока 6 управления подается электрический сигнал U2, пропорциональный скорости основания 3. При помощи блока 6 управления сравнивают сигналы Ui и U2 (скорости объекта 2 и основания 3) по направлению и величине. Полученная информация в виде сигналов Уз и U4 подается на выходы блока 6 управления где сигналы Da и U4 принимают следующие значения: (Uoi при UiU2 0; из Uo2 при UiU2 0; Гиоприи1и2 0, если или UiU2 0; О при UiU2 О, если . где Up, Uoi, Uo2 постоянные сигналы (Ubi больше Uo2). Сигнал из с первого выхода блока 6 управления подается на демпфирующее устройство 9, а сигнал U4 с второго выхода блока 6 управления - на зажимное устройство 10. Согласно логике формирования сигналов УЗ и U4 фиксируют промежутки времени движения объекта 2 и основания 3 в одном направлении.(и1и2 0) при скорости объекта 2, большей скорости основания 3 ( и на выходах блока 6 управления подаются сигналы Уз Уо1 и U4 0. Сигналом УЗ Уо1 увеличивают вязкое сопротивление демпфирующего устройства 9. При сигнале У4 О зажимное устройство 10 обесточено и колодки 14 зажимают тягу 12 демпфирующего устройства 9. В результате этого демпфирующее устройство 9 включено в работу (связано посредством тяг 11 и 12с каркасом 1 и основанием 3 и развивает значительныедиссипативные силы, направленные против движения объекта 2. Скорость объекта 2 уменьшается. Аналогично фиксируЪт промежутки времени движения объекта 2 и основания 3 в разных направлениях (У 1У2 0) и на выходы блока 6 управления подаются сигналы Уз У02 и U4 0. Сигналом Уз Уо2 уменьшают вязкое сопротивление (Уо2 УоО демпфирующего устройства 9. При сигнале У4 О зажимное устройство 10 обесточено и колодки 14 зажимаюттягу 12 демпфирующего устройства 9. В результате этого демпфирующее устройство 9 включено в работу и обеспечивает оптимальное значение диссипативных сил, уменьшающих скорость объекта 2 и неприводящих к болъшим динамическим нагрузкам ударного типа. При У1У2 О и фиксируют промежутки времени движения объекта 2 и основания 3 в одном направлении, когда скорость объекта 2 меньше скорости основания 3. На первом выходе блока 6 управления формируется (или остается неизменным после предыдущего включения) сигнал Уз Уо1| а на втором выходе - сигнал У4 Уо. Под действием сигнала У4 Уо зажимное устройство 10 срабатывает и колодки 14 освобождают тягу 12 демпфирующего устройства 9. В результате этого выключают из работы демпфирующее устройство 9. Тяга 12 свободно перемещается в отверстии 13 и со стороны основания 3 не передаются усилия на каркас 1 (объект 2) через демпфирующее устройство 9, т.е. на объект 2 не действуют диссипативные силы, увеличивающие его скорость. Отслеживание скорости основания 3 и сравнение ее по направлению и величине со скоростью объекта 2 сТюследующей фиксацией ряда промежутков времени, в которые увеличивают и уменьшают вязкое сопротивление демпфирующего устройства 9, а также выключения его из работы, позволяет уменьшить скорость объекта 2, снизить передаваемые на него динамические нагрузки ударного типа и, кроме того, полностью исключить уреличение скорости объекта 2 за счет диссипативных сил.
Такой режим работы амортизатора, обеспечивающий уменьшение скорости объекта 2, повышает эффективность виброзащиты.
Формула изобретения Способ защиты объектов от вибрации, заключающийся в том, что отслеживают скорость объекта и периодически изменяют вязкое сопротивление демпфирующего устройства, отличающийся тем, что, с целью повышения эффективности виброзащиты, дополнительно отслеживают скорость основания, сравнивают ее со скоростью объекта по величине и направлению, фиксируют промежутки времени движения основания и объекта в одном направлении
и при скорости объекта, большей скорости основания, увеличивают вязкое сопротивление демпфирующего устройства, а при меньшей - выключают его, при фиксировании промежутков времени движения объекта и основания в разных направлениях уменьшают вязкое сопротивление демпфирующего устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты объектов от вибраций | 1986 |
|
SU1427108A1 |
| ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 1998 |
|
RU2196262C2 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ | 2008 |
|
RU2374520C1 |
| Пневматический демпфер | 1991 |
|
SU1796800A1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595733C2 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| ДВУХКАМЕРНЫЙ ПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 1998 |
|
RU2139458C1 |
| УСТРОЙСТВО ИНФОРМИРОВАНИЯ МЕХАНИКА-ВОДИТЕЛЯ О РАБОТОСПОСОБНОСТИ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ В УСЛОВИЯХ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ ПРИ ЕЕ ЭКСПЛУАТАЦИИ | 2018 |
|
RU2711043C2 |
| Способ управления диссипативной силой пневматического управляемого амортизатора | 1988 |
|
SU1656239A1 |
Изобретение относится к способам, реализуемым при работе виброзащитной техники, и может использоваться в транспортном машиностроении, например, для защиты человека-оператора от действияслучайных колебаний. Целью изобретения является повышение эффективности виброзащиты за счет уменьшения скорости объекта. При этом отслеживают скорость основания 3, сравнивают ее со скоростью объекта 2 по величине и направлению, фиксируют промежутки времени движения основания 3 и объекта 2 в одном направлении и при скорости объекта 2, большей скорости основания 3. увеличивают вязкое сопротивление деформирующего устройства 9. а при меньшей - выключают его и, при фиксировании промежутков времени движения объекта 2 и основания 3 в разных направлениях, уменьшают вязкое сопротивление деформирующего устройства 9. 1 ил.Jbi.ю4i^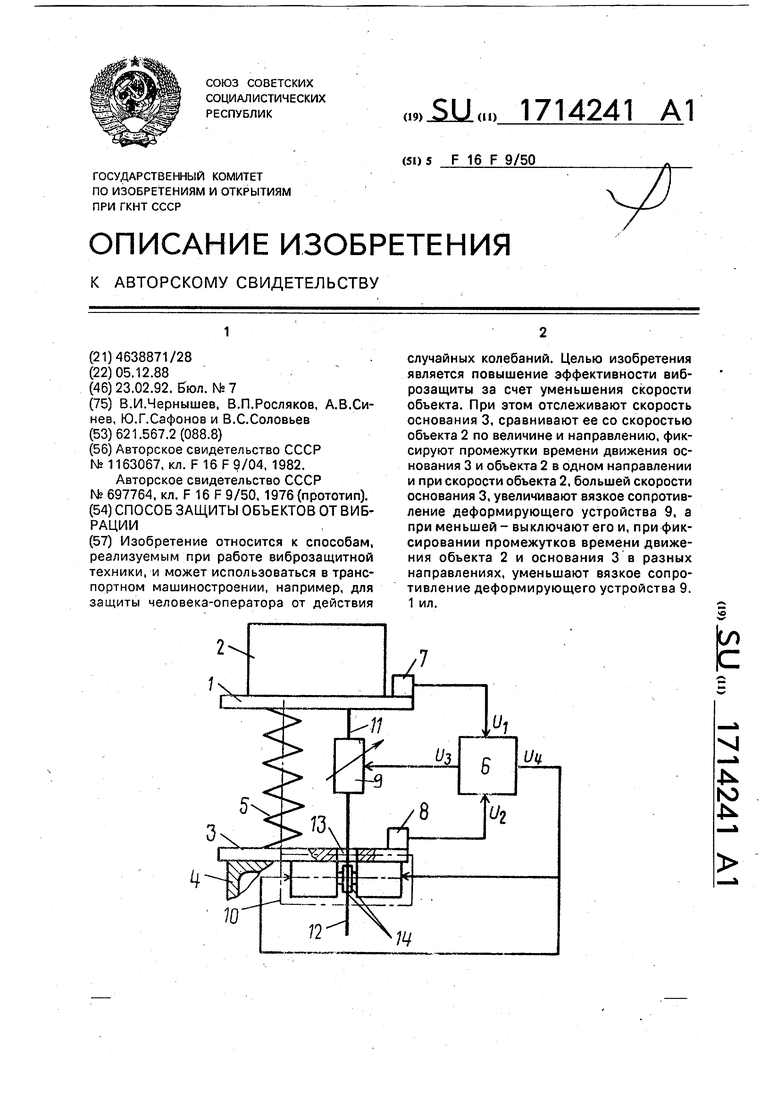
| Авторское свидетельство СССР N31163067, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
