Изобретение относится к машиностроению и предназначено для гашения технических колебаний различных объектов.
Целью изобретения является повышение эффективности гашения колебаний путем обеспечения зависимости величины диссипативной силы от текущего перемещения.
На Фиг.1 представлена принципиальная схема устройства, реализующего предлагаемый способ; на фиг.2 - рабочие диаграммы устройства.
Устройство содержит основание 1, платформу 2 для установки защищаемого объекта, упругий элемент 3, управляемый амортизатор 4, датчик 5 относительного перемещения платформы 2 относительно основания 1, датчик 6 относительной скорости, регистрирующий скорость перемещения платформы 2, и блок 7 управления, включающий первую последовательную цепь, состоящую из фильтра-усилителя 8, нуль-органа 9 и ждущего мультивибратора
10,вход которой подсоединен к датчику 6 скорости, а выход - к запоминающему устройству 11, и вторую цепь, состоящую из фильтра-усилителя 12, вход которой подсоединен к датчику 5 перемещения, а выход - к запоминающему устройству 11.
Выход запоминающего устройства 11 подан на один из входов сумматора 13. Выход фильтра-усилителя 12 через умножитель 14 подан на второй вход сумматора 13. Выход сумматора 13 подсоединен к входу усилителя 15, выход которого соединен с управляющим органом амортизатора 4.
Предлагаемый способ реализуется с помощью устройства следующим образом.
В момент, когда отклонение платформы 2 от нейтрального положения относительно основания 1 достигает максимального значения, сигнал отдатчика 6, проходящий через фильтр-усилитель 8, обращается в нуль и нуль-орган 9 выдает импульс, который запускает ждущий мультивибратор 10, формирующий импульс экспериментально подобранной длительности. Этот импульс подается на запоминающее устройство 11, на которое одновременно подается проходящий через фильтр-усилитель 12 сигнал от датчика 5, пропорциональный отклонению платформы 2 от основания 1. Сигнал от датчика 5 втечение импульса,, выдаваемого мультивибратором 10, запоминается устройством
11,и в течение следующего полупериода подается на один вход сумматора 13.
На второй вход сумматора 13 поступает сигнал от фильтра-усилителя 12, пропорциональный текущему показанию датчика 5 перемещения, который в умножителе 14 умножается на постоянный множитель.
В сумматоре 13 вычисляется сумма сигналов от запоминающего устройства 11 и умножителя 14, которая поступает на усилитель 15, выход которого подсоединен к органу управления амортизатора 4.
Таким образом, в течение полупериода диссипативная сила амортизатора 4, определяемая напряжением на его управляющем органе, пропорциональна сумме двух
величин - амплитуды отклонения платформы 2 от нейтрального положения относительно основания 1 в предыдущем полупериоде колебаний и величины, пропорциональной текущему отклонению платформы 2 от нейтрального положения относительно основания 1.
На фиг.1 введены координаты Z и Y, как отклонения от нейтрального положения относительно земли платформы 2 и основания
1 соответственно. Там же показана координата X(Z-Y) - отклонение платформы 2 от нейтрального положения относительно основания 1,
На фиг.2 приведены рабочие диаграммы управляемого амортизатора, выполненного по предлагаемому способу для двух значений амплитуды X. Стрелки показывают направление движения. Из диаграмм видно, что диссипативная сила F есть сумма
двух величин: постоянной величины, пропорциональной амплитуде отклонения X. Коэффициент пропорциональности в умножителе 14 подобран таким, чтобы сила в конце движения обращалась в нуль.
Таким образом, предлагаемый способ
обеспечивает изменение диссипативной силы амортизатора 4 с учетом текущего перемещения, что позволяет снизить эквивалентную жесткость упругого элемента 3
(совместно с амортизатором 4), обеспечивая повышение качества виброзащиты,
Формула изобретения Способ управления диссипативной силой пневматического управляемого амортизатора по авт.св. № 1578387, отличающийся тем, что, с целью повышения эффективности гашения колебаний, измеряют величину текущего перемещения подвижного элемента, а перепад давления между полостями изменяют также с учетом текущего перемещения.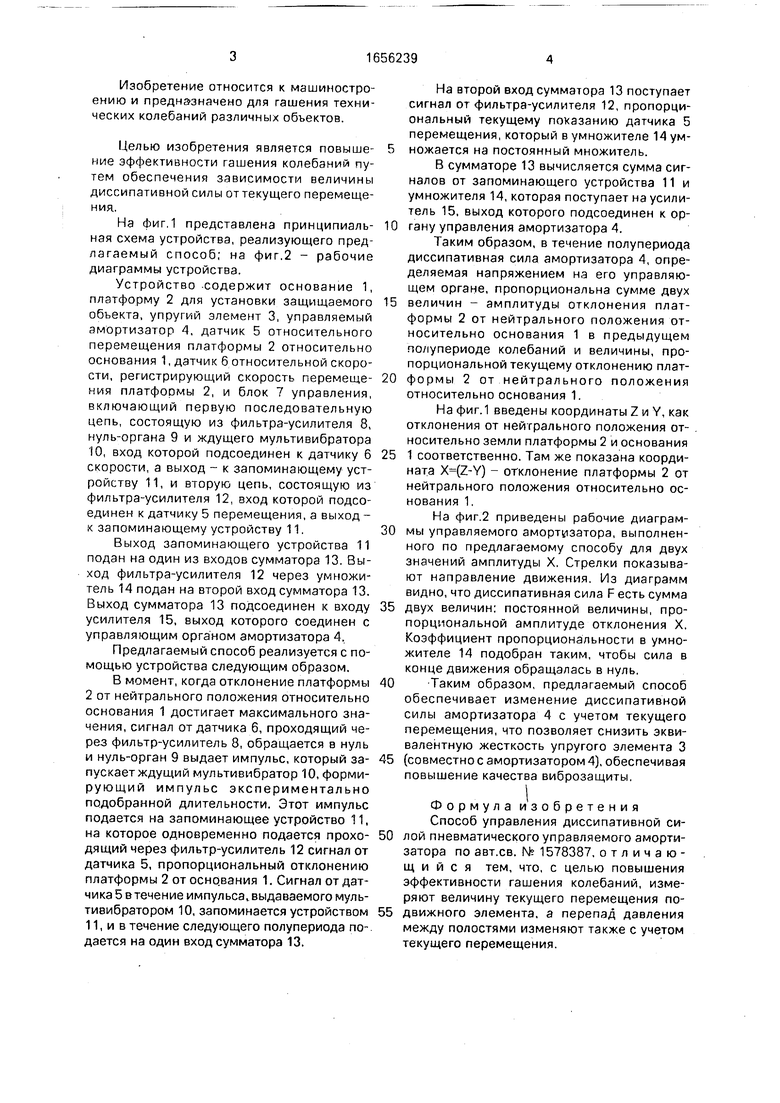
Изобретение относится к машиностроению и предназначено для гашения механических колебаний различных объектов. Целью изобретения является повышение эффективности гашения колебаний за счет обеспечения зависимости величины дйсси- пативной силы от текущего перемещения. Величина диссипзтивной силы амортизатора 4 изменяется с учетом текущего перемещения платформы 2. 2 ил.
фиг. 2
| Способ управления диссипативной силой пневматического управляемого амортизатора | 1987 |
|
SU1578387A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
