В известном датчике блок обработки выполнен в виде дифференциальной схемы. При перемещении якоря, механически связанного с объектом вибрация которого контролируется, на выходе блока обработки появляется напряжение, зависящее от величины перемещения якоря. Недостатком известных датчиков является относительно низкая точность работы, что приводит к непостоянству коэффициента передачи датчика при различных положениях якоря и затрудняет проектирование систем автоматического управления вибрационными объектами, на которых датчик используется в качестве источника информации о виброперемещениях объекта.
Цель изобретения - повышение точности за счет линеаризации выходной характеристики датчика.
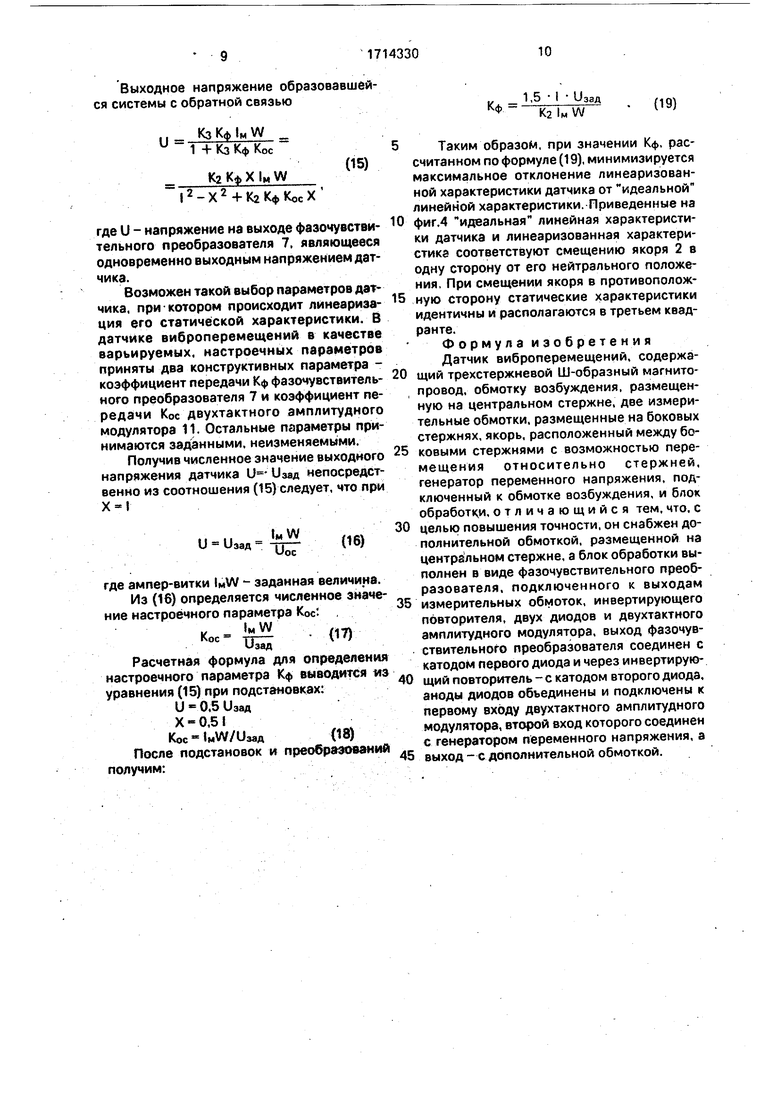
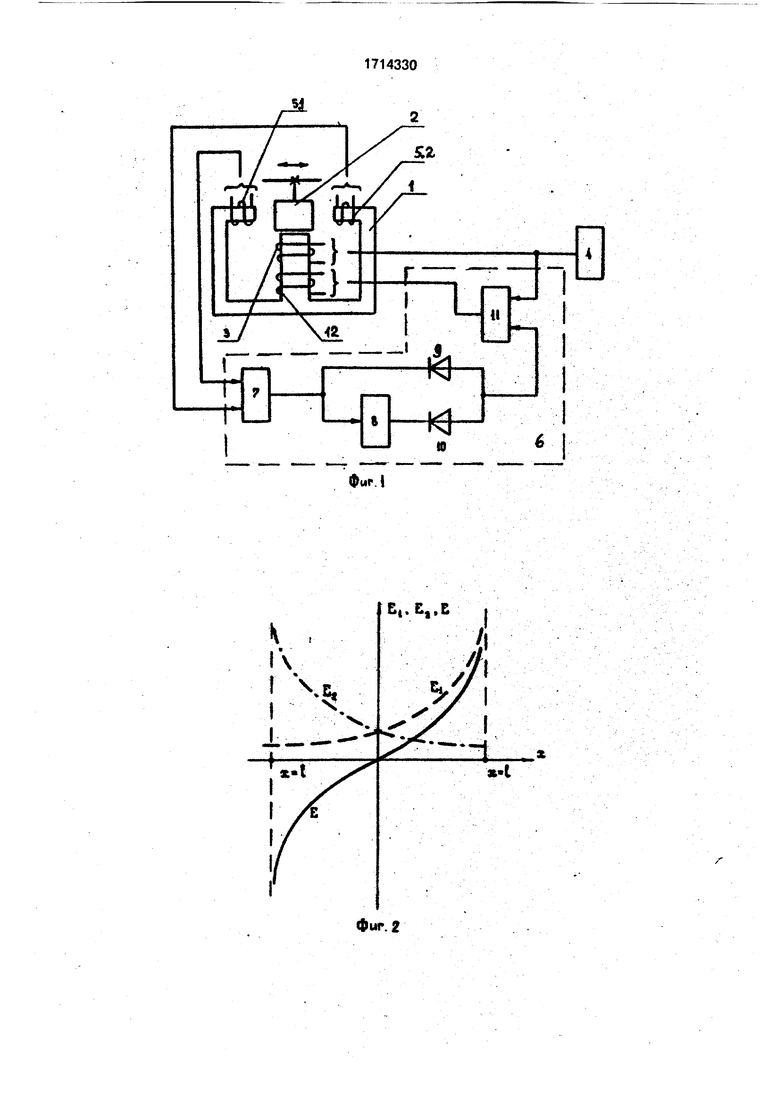
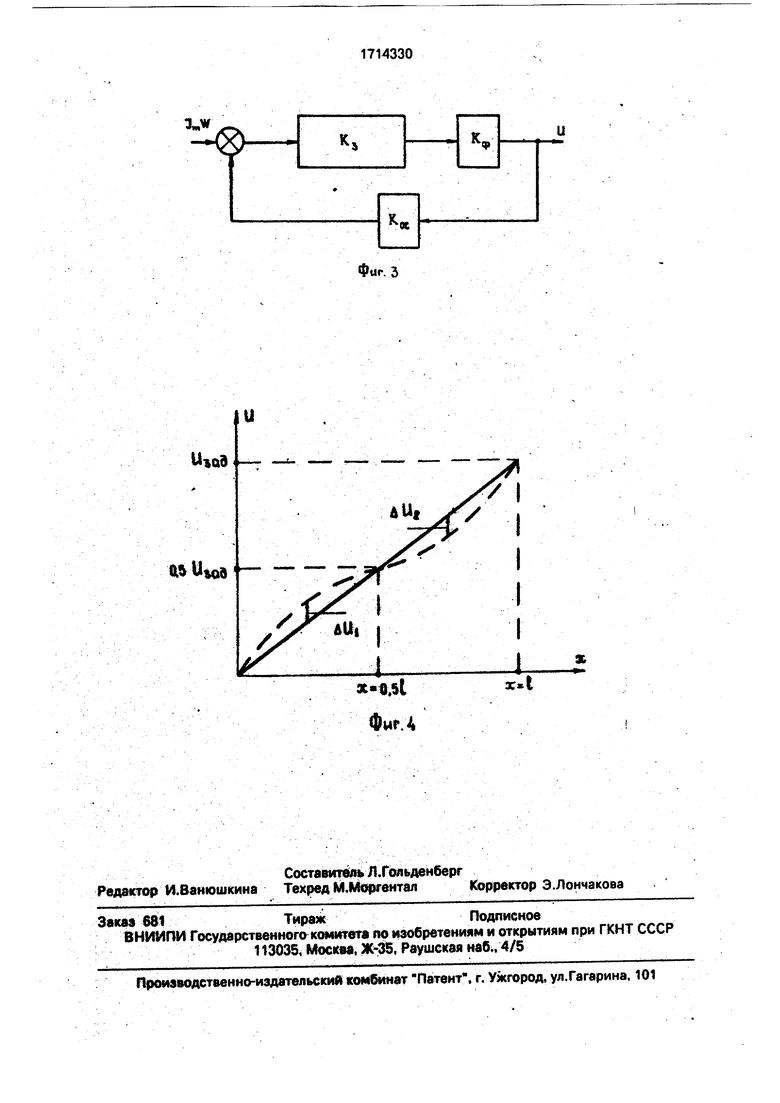
На фиг.1 изображена функциональная схема датчика виброперемещений; нафиг,2 - график статических характеристик датчика; на фиг.З - структурная схема датчика; на фиг.4 - график выбора настроечных параметров.
Датчик виброперемещений содержит трехстержневой Ш-образный магнитопровод 1, якорь 2, расположенный между боковыми стержнями магнитопровода. обмотку
3возбуждения, размещенную на центральном стержне и подключенную к генератору
4переменного напряжения, измерительные обмотки 5.1 и 5.2, размещенные на боковых стержнях. Датчик содержит также блок 6 обработки, включающий фазочувствительный преобразователь 7, инвертирующий повторитель 8, первый диод 9, второй диод 10 и двухтактный амплитудный модулятор 11. На центральном стержне магнитопровода, кроме обмотки 3 возбуждения, находится дополнительная обмотка 12. Выходы измерительных обмоток 5.1 и 5.2 соединены с первым и вторым входами фазочуаствительного преобразователя 7, выход которого связан с катодом первого диода 9 и через инвертирующий повторитель 8 - с катодом второго диода 10. Аноды диодов объединены и подключены к первому входу двухтактного амплитудного модулятора 11, второй вход которого соединен с генератором 4 переменного напряжения, а выход -с дополнительной обмоткой 12.
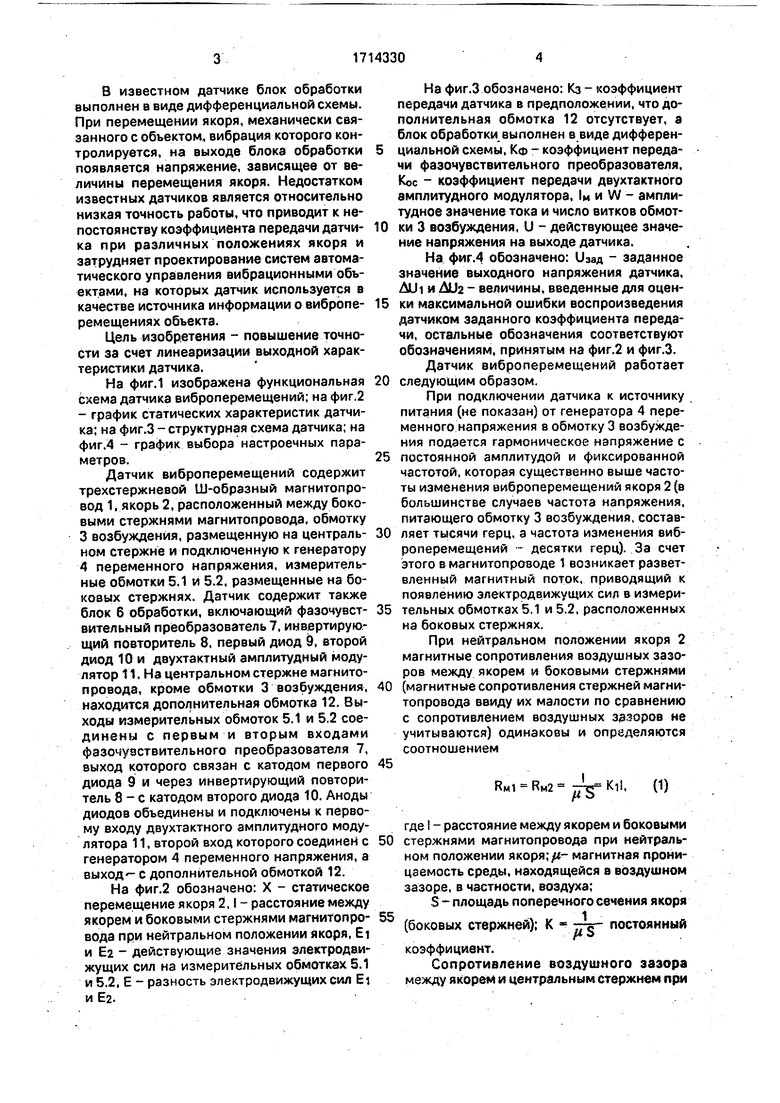
На фиг.2 обозначено: X - статическое перемещение якоря 2,1 - расстояние между якорем и боковыми стержнями магнигопровода при нейтральном положении якоря, Et и 2 - действующие значения электродвижущих сил на измерительных обмотках 5.1 и 5.2, Е - разность электродвижущих сил Ei и Е2.
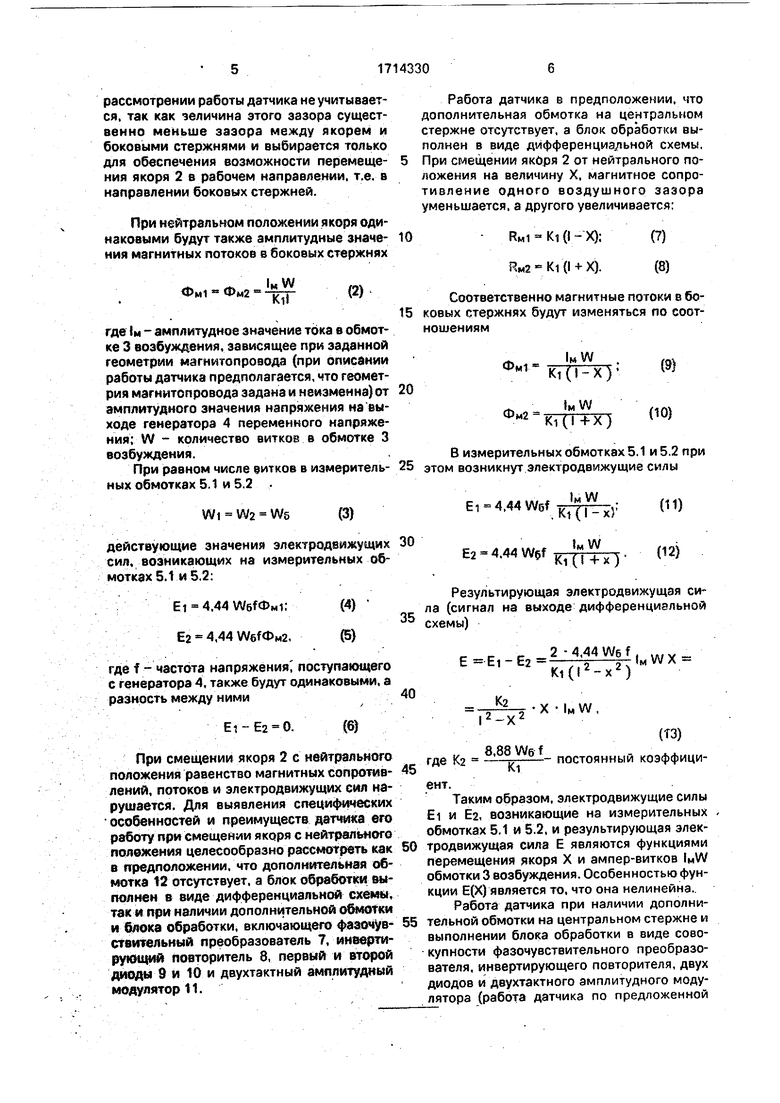
На фиг.З обозначено: Кз - коэффициент передачи датчика в предположении, что дополнительная обмотка 12 отсутствует, а блок обработки выполнен в виде дифференциальной схемы. Ко - коэффициент передачи фазочувствительного преобразователя. Кос коэффициент передачи двухтактного амплитудного модулятора, 1м и W - амплитудное значение тока и число витков обмотки 3 возбуждения, U - действующее значение напряжения на выходе датчика.
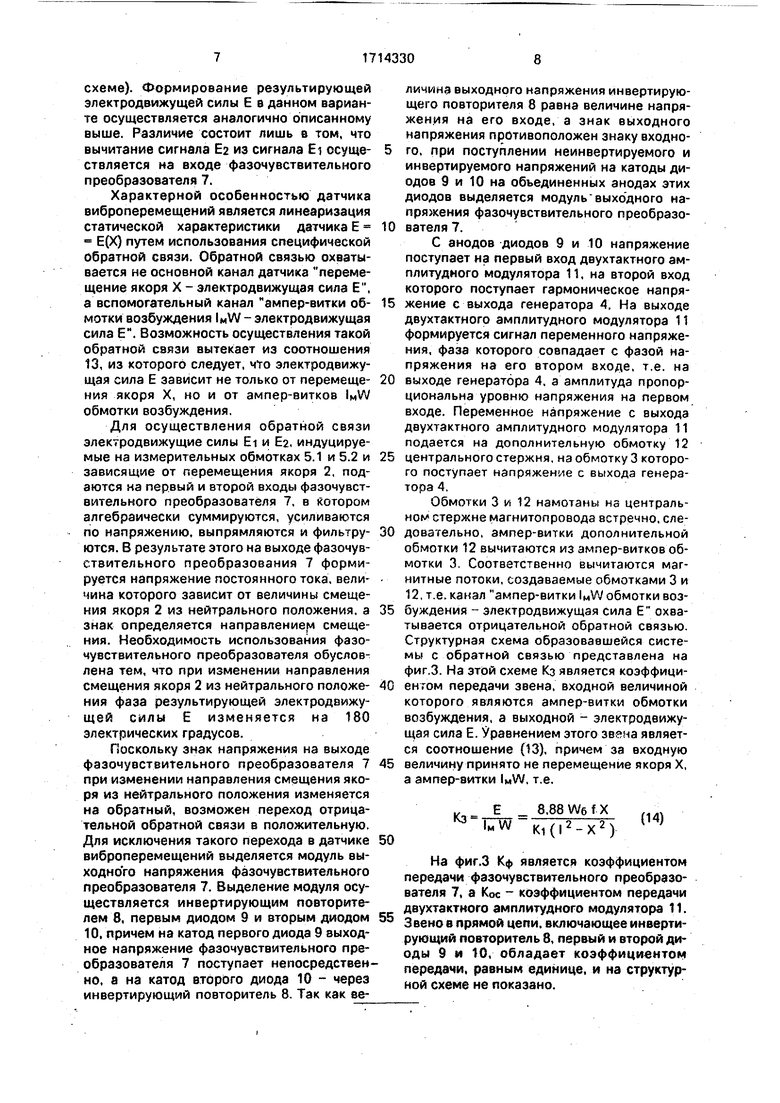
На фиг.4 обозначено: Озад - заданное значение выходного напряжения датчика, AUi и /MJ2 величины, введенные для оценки максимальной ощибки воспроизведения датчиком заданного коэффициента передачи, остальные обозначения соответствуют обозначениям, принятым на фиг.2 и фиг.З. Датчик виброперемещений работает
следующим образом.
При подключении датчика к источнику питания (не показан) от генератора 4 переменного напряжения в обмотку 3 возбуждения подается гармоническое напряжение с
постоянной амплитудой и фиксированной частотой, которая существенно выше частоты изменения виброперемещеиий якоря 2 (в большинстве случаев частота напряжения, питающего обмотку 3 возбуждения, составляет тысячи герц, а частота изменения виброперемещений - десятки герц). За счет этого в магнитоправоде 1 возникает разветвленный магнитный поток, приводящий к появлению электродвижущих сил в измерительных обмотках 5.1 и 5.2, расположенных на боковых стержнях.
При нейтральном положении якоря 2 магнитные сопротивления воздушных зазоров между якорем и боковыми стержнями
(магнитные сопротивления стержней магнитопровода ввиду их малости по сравнению с сопротивлением воздушных зазоров не учитываются) одинаковы и определяются соотношением
RMI Вм2 Kil, (1)
где I - расстояние между якорем и боковыми стержнями магнитопровода при нейтральном положении якоря;/«- магнитная проницаемость среды, находящейся в воздушном заэоре, в частности, воздуха;
S - площадь поперечного сечения якоря
/гг--- .--Л- tf
(боковых стержней); К
постоянный
коэффициент.
Сопротивление воздушного зазора между якорем и центральным стержнем при
рассмотрении работы датчика не учитывается, так как зеличина этого зазора существенно меньше зазора между якорем и боковыми стержнями и выбирается только для обеспечения возможности перемещения якоря 2 в рабочем направлении, т.е. в направлении боковых стержней.
При нейтральном положении якоря одинаковыми будут также амплитудные значения магнитных потоков в боковых стержнях Фм1 Фм2 где 1м - амплитудное значение тбка в обмотке 3 возбуждения, зависящее при заданной геометрии магнитопровода (при описании работы датчика предполагается, что геометрия магнитопровода задана и неизменна) от амплитудного значения напряжения на выходе генератора 4 переменного напряжения; W - количество витков в обмотке 3 возбуждения., При равном числе витков в измерительных обмотках 5.1 и 5.2 .
(3)
Wi W2 W6
действующие значения электродвижущих 30 сил, возникающих на измерительных обмотках 5.1 и 5.2: Et 4,44W6fOMi:(4) Е2 4,44 WefOna.(5) где f - частота напряжения поступающего с генератора 4, также будут одинаковыми, а разность между ними40 El -Е2 0.
При смещении якоря 2 с нейтрального положения равенство магнитных сопротивпений, потоков и электродвижущих сия нарушается. Для выявления спеии Имеских особенностей и преимуществ датчика его работу при смещении якоря с нейтрального положения целесообразно расс«4отреть как в предположении, что дополнительная обмотка 12 отсутствует, а блок обработки выполнен 8 виде дифференциальной схемы, так и при наличии дополнительной обмотки и блока обработки, включающего фазочувсгвителькый преобразователь 7, инеертиру1снций повторитель 8, первый и второй диоды 9 и 10 и двухтактный амплитудный модулятор 11.
Работа датчика в предположении, что дополнительная обмотка на центральном стержне отсутствует, а блок обработки выполнен в виде дйфференциа/1ьной схемы. При смещении якОря 2 от нейтрального положения на величину X, магнитное сопротивление одного воздушного зазора уменьшается, а другого увеличивается;
RMI Ki (I - X):(7)
10
Ям2 Ki (I + X).(8) 15 ков нош 25 это
1м W
(11)
Ei 4,44W6f . KI ( I - х5
E2 ..
(12) ла схе
где К2 постоянный коэффици14
ент.
Таким образом, электродвижущие силы EI и Е2, возникающие на измерительных обмотках 5.1 и 5.2, и результирующая электродвижущая сила Е являются функциями перемещения якоря X и ампер-витков IMW обмотки 3 возбуждения. Особенностью функции Е(Х) является то, что она нелинейна..
Работа датчика при наличии дополнительной обмотки на центральном стержне и выполнении блока обработки в виде совокупности фазочувствительного преобразователя, инвертирующего повторителя, двух диодов и двухтактного амплитудного модулятора (работа датчика по предложенной Соответственно магнитные потоки в бох стержнях будут изменяться по соотениям1м W Kt(l-X) JM W Ki(-fX) В измерительных обмотках 5.1 и 5.2 при возникнут электродвижущие силы Результирующая электродвижущая си(сигнал на выходе дифференциальной мы) E.E,.MWX Ki(|2-x2) , К2 X IMW,
схеме). Формирование результирующей электродвижущей силы Е а данном варианте осуществляется аналогично описанному выше. Различие состоит лишь в том, что вычитание сигнала Е2 из сигнала EI осуществляется на входе фазочувствительного преобразователя 7.
Характерной особенностью датчика виброперемещений является линеаризация статической характеристики датчика Е ° Е(Х} путем использования специфической Обратной связи. Обратной связью охватывается не основной канал датчика перемещение якоря X - электродвижущая сила Е, а вспомогательный канал ампер-витки обмотки возбуждения IMW - электродвижущая сила Е. Возможность осуществления такой обратной связи вытекает из соотношения 13, из которого следует, 4Yo электродвижущая сила Е зависит не только от перемещеНИР якоря X, но и от ампер-витков N обмотки возбуждения.
Для осуществления обратной связи электродвижущие силы Ei и Еа, индуцируемые на измерительных обмотках 5.1 и 5.2 и зависящие от перемещения якоря 2, подаются на первый и второй входы фазочувствительного преобразователя 7. в котором алгебраически суммируются, усиливаются по напряжению, выпрямляются и фильтруются. В результате этого на выходе фазочувствительного преобразования 7 формируется напряжение постоянного тока, величина которого зависит от величины смещения якоря 2 из нейтрального положения, а знак определяется направление,м смещения. Необходимость использования фазочувствительного преобразователя обусловлена тем, что при изменении направления смещения якоря 2 из нейтрального положения фаза результирующей электродвижущей силы Е изменяется на 180 электрических градусов.
Поскольку знак напряжений на выходе фазочувствительного преобразователя 7 при изменении направления смещения якоря из нейтрального положения изменяется на обратный, возможен переход отрицательной обратной связи в положительную. Для исключения такого перехода в датчике виброперемещений выделяется модуль выходного напряжения фазочувствительного преобразователя 7. Выделение модуля осуществляется инвертирующим повторителем 8, первым диодом 9 и вторым диодом 10. причем на катод первого диода 9 выходное напряжение фазочувствительного преобразователя 7 поступает непосредственно, а на катод второго диода 10 - через инвертирующий повторитель 8, Так как величина выходного напряжения инвертирующего повторителя 8 равна величине напряжения на его входе, а знак выходного напряжения противоположен знаку входного, при поступлении неинвертируемого и инвертируемого напряжений на катоды диодов 9 и 10 на обьединенных анодах этих диодов выделяется модульвыходного напряжения фазочувствительного преобразователя 7.
С анодов диодов 9 и 10 напряжение поступает на первый вход двухтактного амплитудного модулятора 11, на второй вход которого поступает гармоническое напряжение с выхода генератора 4, На выходе двухтактного амплитудного модулятора 11 формируется сигнал переменного напряжения, фаза которого совпадает с фазой напряжения на его втором входе, т.е. на выходе генератора 4. а амплитуда пропорциональна уровню напряжения на первом входе. Переменное напряжение с выхода двухтактного амплитудного модулятора 11 подается на дополнительную обмотку 12 центрального стержня, на обмотку 3 которого поступает напряжение с выхода генератора 4.
Обмотки 3 и 12 намотаны на центральHON стержне магнитопровода встречно, следовательно, ампер-витки дополнительной обмотки 12 вычитаются из эмпер-витков обмотки 3. Соответственно вычитаются магнитные потоки, создаваемые обмотками 3 и 12, т.е. канал ампер-витки InW обмотки возбуждения - электродвижущая сила Е охватывается отрицательной обратной связью. Структурная схема образовавшейся системы с обратной связью представлена на фиг.З. На ЭТОЙ схеме Кз является коэффициентом передачи звена, входной величиной которого являются ампер-витки обмотки возбуждения, а выходной - электродвижущая сила Е. Уравнением этого звана является соотношение (13), причем за входную величину принято не перемещение якоря X, а ампер-витки , т.е.
8,88W6f X
Е UTW
(14) Ki(|2-x2)
На фиг.З Кф является коэффициентом передачи фазочувствительного преобразователя 7, а Кос коэффициентом передачи двухтактного амплитудного модулятора 11. Звено в прямой цепи, включающее инвертирующий повторитель 8, первый и второй диоды 9 и 10, обладает коэффициентом передачи, равным единице, и на структурной схеме не показано. Выходное напряжение образовавшейся системы с обратной связью .. K3j,jMj/V 1+КзКфКос К2 Кф X 1м W |2-х2ч-К2КфКосХ где и - напряжение на выходе фазочувствительного преобразователя 7. являющееся одновременно выходным напряжением датчика. Возможен такой выбор параметров датчика, при-котором происходит линеаризация его статической характеристики. В датчике виброперемещений в качестве варьируемых, настроечных параметров приняты два конструктивных параметра коэффициент передачи Кф фазочувствительного преобразователя 7 и коэффициент передачи Кос двухтактного амплитудного модулятора 11. Остальные параметры принимаются заданными, неизменяемь1ми. Получив численное значение выходного напряжения датчика иэад непосредственно из соотношения (15) следует, что при Х-1 и иэад где ампер-витки IMW заданная величина. Из (16) определяется численное значение настроечного параметра Кос: , IMW,.-. ° Ц Расчетная формула для определения настроечного параметра Кф выводится tts уравнения (15) при подстановках: и-0,5 иэад Х-0,5 Koc lMW/U3aA(18) После подстановок и преобраэтваний получим: 5 10 15 20 25 30 35 40 45 1.5 1 и KaUW Таким образом, при значении Кф, рассчитанном по формуле (19), минимизируется максимальное отклонение линеаризованной характеристики датчика от идеальной линейной характеристики. Приведенные на фиг.4 идеальная линейная характеристики датчика и линеаризованная характеристике соответствуют смещению якоря 2 в одну сторону от его нейтрального положения. При смещении якоря в противоположную сторону статические характеристики идентичны и располагаются в третьем квадранте. Формула изобретен и я Датчик виброперемещений, содержащий трехстержневой Ш-образный магнитепровод, обмотку возбуждения, размещенную на центральном стержне, две измерительные обмотки, размещенные на боковых стержнях, якорь, расположенный между боковыми стержнями с возможностью перемещения относительно стержней, генератор переменного напряжения, подключенный к обмотке возбуждения, и блок обработ1 и, отличающийся тем, что, с цельк) повышения точности, он снабжен дополнительной обмоткой, размещенной на центральном стержне, а блок обработки выполнен в виде фазочувствительного преобразователя, подключенного к выходам измерительных обмоток, инвертирующего повторителя, двух диодов и двухтактного амплитудного модулятора, выход фазочувствительного преобразователя соединен с катодом первого диода и через инвертирующий повторитель - с катодом второго диода, аноды диодов объединены и подключены к первому входу двухтактного амплитудного модулятора, второй вход которого соединен с генератором переменного напряжения, а выход - с дополнительной обмоткой.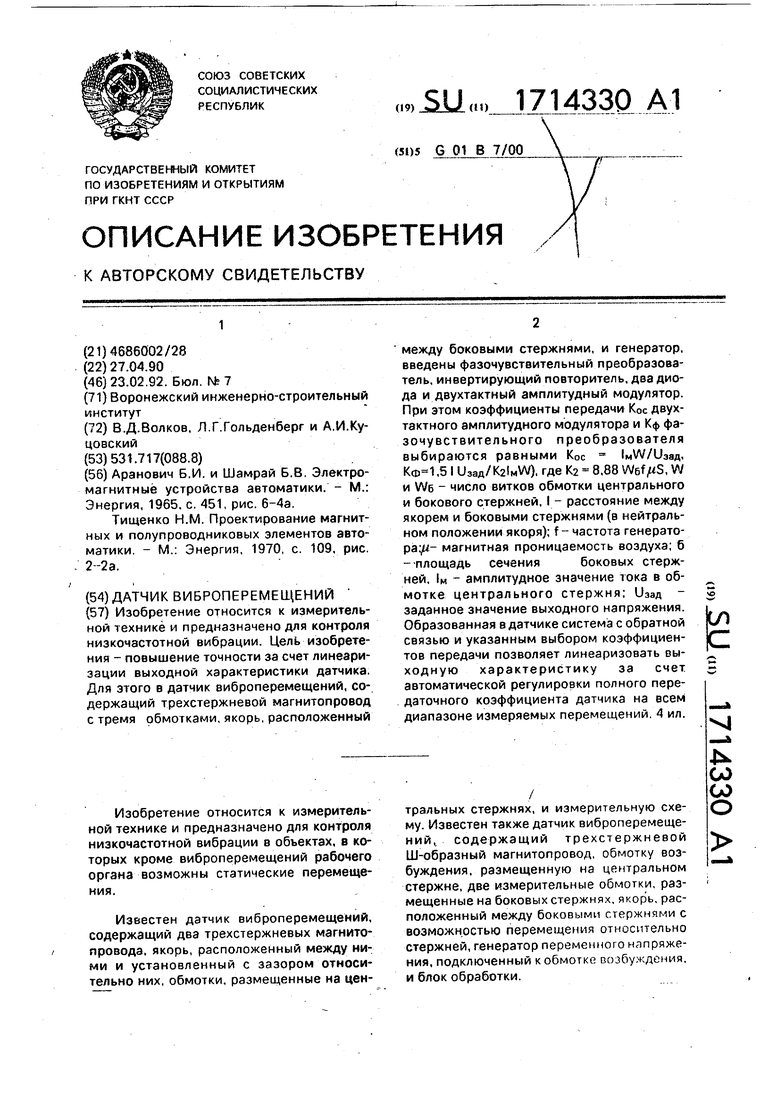
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ПОСТОЯННОГО ТОКА | 1992 |
|
RU2037185C1 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКОВОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ТРУБ СО СТОРОНЫ ИХ ВНУТРЕННЕЙ ПОВЕРХНОСТИ | 2015 |
|
RU2634544C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| Измерительный преобразователь активной мощности | 1989 |
|
SU1659890A1 |
| Способ определения местоположения диэлектрического промежутка в электропроводящем объекте и устройство для его осуществления | 2017 |
|
RU2665592C1 |
| ЭЛЕКТРОГРАВИРОВАЛЬНАЯ МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ РЕЛЬЕФНЫХ ПЕЧАТНЫХ ФОРМ | 1956 |
|
SU112764A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Путевой датчик | 1978 |
|
SU844435A1 |
| Бесконтактный кондуктометр | 1986 |
|
SU1337752A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
Изобретение относится к измерительной технике и предназначено для контроля низкочастотной вибрации. Цель изобретения - повышение точности за счет линеаризации выходной характеристики датчика. Для этого в датчик виброперемещений, содержащий трехстержневой магнитопровод с тремя обмотками, якорь, расположенныймежду боковыми стержнями, и генератор, введены фазочувствительный преобразователь, инвертирующий повторитель, два диода и двухтактный амплитудный модулятор. При этом коэффициенты передачи Кос двухтактного амплитудного модулятора и Кф фа- зочувствительного преобразователя выбираются равными Кос = lMW/иэад, Кф=1,5 I UsaA/KalnW), где Ка = 8,88 Wef/^S, W и WB ~ число витков обмотки центрального и бокового стержней, I - расстояние между якорем и боковыми стержнями (в нейтральном положении якоря); f- частота генерато- pa:fi- магнитная проницаемость воздуха; б -•площадь сечениябоковых стержней, 1м - амплитудное значение тока в обмотке центрального стержня; Узад - заданное значение выходного напряжения. Образованная в датчике система с обратной связью и указанным выбором коэффициентов передачи позволяет линеаризовать выходную характеристику за счет автоматической регулировки полного передаточного коэффициента датчика на всем диапазоне измеряемых перемещений. 4 ил.Изобретение относится к измерительной технике и предназначено для контроля низкочастотной вибрации в объектах, в которых кроме виброперемещений рабочего органа возможны статические перемещения.Известен датчик виброперемещений, содержащий два трехстержневых магнито- лровода, якорь, расположенный между ними и установленный с зазором относительно них, обмотки, размещенные на цен-/тральных стержнях, и измерительную схему. Известен также датчик виброперемещений, содержащий трехстержневой Ш-образный магнитопровод, обмотку возбуждения, размещенную на центральном стержне, две измерительные обмотки, размещенные на боковых стержнях, якорь, расположенный между боковыми стержнями с возможностью перемещения относительно стержней, генератор переменного напряжения, подключенный к обмотке возбуждения. и блок обработки.4:^.СА>& ЫО
Ь|. ,ь
фиг. 2
UlQd
WUto9
U
К,
| Аранович Б.И | |||
| и Шамрай Б.В | |||
| Электромагнитные устройства автоматики | |||
| - М,: Энергия, 1965 | |||
| с | |||
| ИГРУШКА С ПЛАВАЮЩЕЙ ФИГУРОЙ | 1922 |
|
SU451A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Проектирование магнитных и полупроводниковых элементов автоматики | |||
| - М.: Энергия, 1970, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
