Изобретение относится к измерительной технике и может быть использовано при градуировке высокочувствительных акселерометров.
Известны устройства градуировки акселерометров.
Недостаток зтих устройств состоит в том, что они позволяют проводить градуировку акселерометров, рассчитанных лишь наобычный диапазон измерения ускорений (). Их применение для градуировки высокочувствительных акселерометров, рассчитанных на измерение малых и сверхмалых ускорений, довольно проблематично. В первую очередь это связано с трудностью исключения различных сейсмических помех на результаты градуировки высокочувствительных акселерометров.
Наиболее близким к изобретению по технической сущности является устройство, содержа|дее поверочную камеру, платформу, дополнительное тело, прикрепленное с помощью измерительного стержня к верхней части платформы, злектромагнит, удерживающий дополнительное тело в верхней части камеры, арретирующие планки и стержни крепления, связывающие перед проведением испытаний поверочную платформу и дополнительное тело, арретир, жестко фиксирующий в момент перегрузок дополнительное тело относительно платформы, измеритель силы, фиксирующий во время испытаний силу взаимодействия, возникающую между платформой и дополнительнымтелом, блок задержки, вычислительное устройство, регистрирующее устройство, амортизационное устройства, редуктор, устройство создания давления или разрежения в поверочной камере и устройство управления, один выход которого подключен к редуктору, а другой - к электромагниту, выход измерителя силы подключен к первому входу вычислительного устройства, а выход градуируемого акселерометра, закрепленного на платформе, подключен к, второму входу вычислительного устройства, выход которого подключен к входу регистрирующего устройства.
Недостатком прототипа является то, что для определения фактического значения задаваемого ускорения торможения используется алгоритм вычисления, в который входят параметры поверочной платформы и дополнительного тела (массы, безразмерные коэффициенты сопротивления и площади характерного сечения), погрешности в определении которых прямо сказываются на точности определения ускорения торможения, по которому затем производится расчет коэффициента преобразования градуируемого высокочувствительного акселерометра..
Целью изобретения является повышение точности устройства за .счет снижения погрешностей.
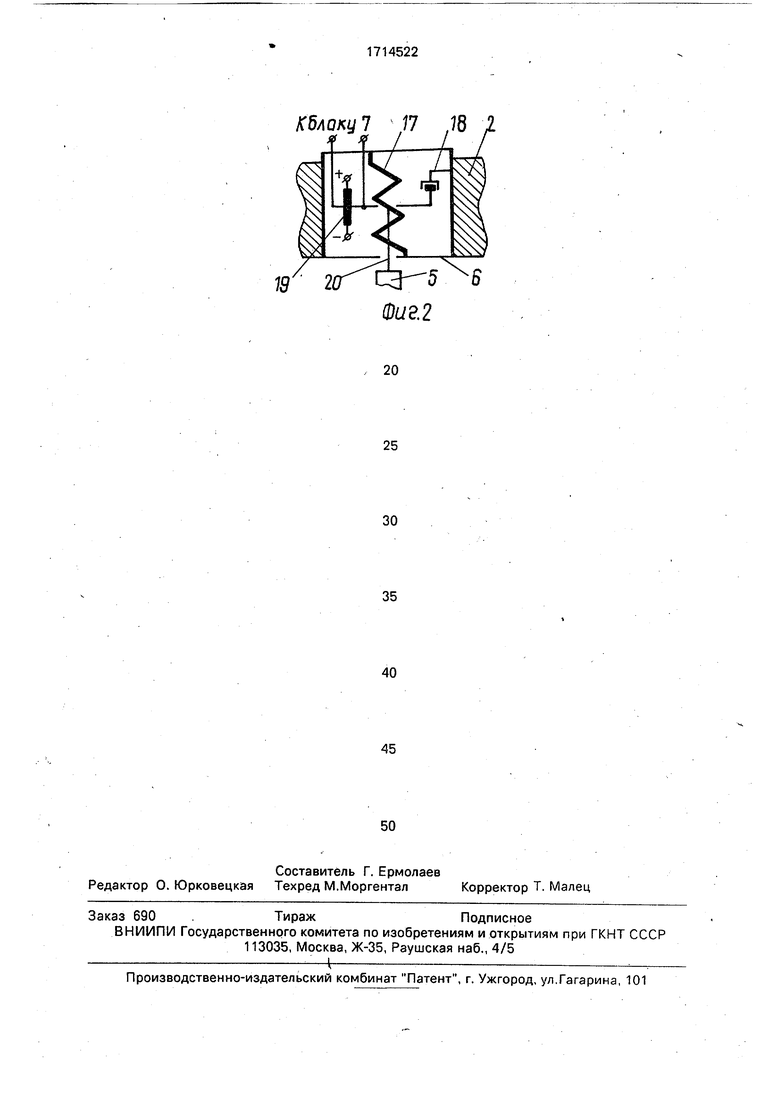
На фиг. 1 представлена,блок-схема устройства градуировки высокочувствительных акселерометров; на фиг. 2 - пример возможного выполнения измерителя силы.
Устройство градуировки содержит поверяемые высокочувствительные акселерометры 1, закрепляемые на поверочной платформе 2, впереди которой размещается дополнительное тело 3 в виде плоской пластины, превосходящей по площади характерного сечения платформу 2, которое полностью закрывает платформу во время падения от набегающего воздействия воздуха, находящегося в поверочной камере 4. На внутренней стороне пластины закреплены симметрично относительно центра не менее трех измерительных стержней 5 (для обеспечения статической устойчивости системы тел пластина - платформа во время падения), которые соединены с измерителями 6 силы, закреплёнными на поверочной платформе 2. Выходы измерителей 6 силы подключены к первым входам вычислительного устройства 7, а к его вторым входам подключены поверяемые акселерометры 1, Выход вычислительного устройства 7 подключен к регистрирующему устройству 8. Платформа 2 удерживается в верхней части поверочной камеры 4 с помсГщью электромагнита 9. В устройство входит блок 10 задержки, управляющий арретиром 15, предохраняющим измерители 6 силы от перегрузок особенно в моменты высвобождения платформы 2 и ее соприкосновения с амортизационным устройством 11 посредством раздвижных захватов 16, которые также срабатывают по сигналу от блока 10 задержки. Устройство градуировки содержит также редуктор 12, устройство 13, создающее в поверочной камере необходимое давление или разрежение и устройство 14 управления.
Измеритель 6 силы (фиг,)содержит измерительную пружину 17, демпфер 1Ь, потенциометрический датчик 19 и измерительную иглу 20, жестко соединяющую измерительный стержень 5 с измерительной пружиной 17. Фактически измеритель силы представляет собой пружинный динамометр с электрическим выходом.
Устройство работает следующим образом.
Градуируемый акселерометр 1 закрепляют на платформе 2 так, что ось его чувствительности совпадает с осями чувствительности измерителей 6 силы. Платформа 2 закрепляется в верхней части поверочной камеры 4 с помощью электромагнита 9. Устройством 13 в поверочной камере 4 создается определенное избыточное давление или разрежение. После этого по команде от устройства 14 управления срабатывает удерживающий электромагнит 9 и система тел платформа-поверяемые акселе рометры-до пол нительное тело начинает перемещаться вертикально вниз в режиме свободного падения. Через некоторый интервал времени по сигналу от блока 10 задержки срабатывает арретир 15 и измерители 6 начинают измерять силу взаимодействия между платформой 2 и пластиной 3, возникающую в измерительных стержнях 5. Сигналы от измерителей 6 силы поступают в вычислительное устройство 7, где производится вычисление ускорения торможения в соответствии с выражением y(t) (mn + marS Fi(t), где X) ускорение торможения платформы (всей системы тел); та - масса поверяемого акселерометра (группы акселерометров); Шп масса платформы; N - количество применяемых измерителей сил (измерительных ртержней); Fi(T)- измеряемая сила взаимодействия, возникающая, в связи (измерительном стержне).. Одновременно вычислительное устройство фиксирует ускорение торможения с испытуемого акселерометра. Результаты измерений обрабатываются в вычислительном устройстве 7 и поступают в регистрирующее устройство 8. Непосредственно перед достижением платформой 2 нижней части поверочной камеры по сигналу от блока 10 задержки срабатывает арретир 15 и жестко фиксирует пластину 3 относительно платформы 2, а также срабатывают раздвижные захваты 16, с помощью которых мортизационноеустроТ1Ство 11 улавливает платформу 2 и предохраняет ее of разрушения. Преимущество предлагаемого устройства градуировки по сравнению с прототипом заключается в том, что относительная ошибка определения ускорения торможения 6f платформы в предлагаемом устройстве (5у 5т а в прототипе d d +df+/3( (З).(З) Сравнение формул (3) и (2) показывает, что формула (3) содержит дополнительный член, определяющий величину дополнительной погрешности, обусловленной ошибками в определении параметров, характеризующих количественные и качественные свойства (габаритные размеры, форма, покрытие и т.п.) взаимодействующих платформ и дополнительного тела, причем эта составляющая погрешности является определяющей. Формула изобретения Устройство градуировки высокочувствительных акселерометров, содержащее поверочную камеру, платформу, дополнительное тело, прикрепленное с помощью измерительного стержня к платформе, электромагнит, арретир, датчик силы, блок задержки, вычислительный блок, регистратор, амортизационный блок, редуктор,.блок создания давления или разрежения и блок управления, один выход которого подклю.чен к редуктору, а другой - к- электромагниту, выход датчика силы подключен к вычислительному блоку, к другому, входу которого подключен выход градуируемого акселерометра, закрепленного на платформе, выход вычислительного блока подключен к входу регистратора, отличающееся тем, что, с целью повышения точности за счет снижения погрешностей, связанных с определением площадей платформ, дополнительное тело выполнено в виде плоской пластины, уста1;1овленной впереди платформы по направлению ее перемещения и прикрепленной к ней посредством не трех измерительных стержней, располагаемых симметрично относительно центра пластины, каждый измерительный стержень соединен при этом с соответствующим датчиком силы, выходы которых подключены к вычислительному блоку, а площадь дополнительного тела выбрана большей площади характерного сечения поворотной платформы.
Шоку 7 17 J8 1
У .,-Л /
лг лг
2 ГСЭ-5 &
5 Фиг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки акселерометров | 1988 |
|
SU1589217A1 |
| Устройство градуировки и поверки высокочувствительных акселерометров | 1991 |
|
SU1811613A3 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ ДИСТАНЦИОННОГО ТЕСТИРОВАНИЯ БЛОКА АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2271015C1 |
| Устройство для градуировки акселерометров | 1983 |
|
SU1137399A1 |
| Способ градуировки акселерометров | 1989 |
|
SU1709225A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛОБОВОГО СОПРОТИВЛЕНИЯ ИССЛЕДУЕМОГО ТЕЛА В РАЗРЕЖЕННОЙ СРЕДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371693C1 |
| Устройство для динамической градуировки ударного пьезоэлектрического акселерометра | 1977 |
|
SU699438A1 |
| Способ градуировки вертикальных акселерометров | 1988 |
|
SU1569729A1 |
| Устройство для динамической градуировки ударного акселерометра | 1982 |
|
SU1015312A1 |
Изобретение относится к измеритель- ной'технике и может быть использовано при градуировке высокочувствительных акселерометров. Целью изобретения является повышение точности устройства. Поставленная цель достигается тем, что в устройство для градуировки вводится дополнительное тело 3 в виде плоской пластины, которая размещается впереди платформы 2 с акселерометрами 1 и по площади характерного сечения превосходит платформу 2. При этом во время падения платформа 2 полностью закрывается дополнительным телом 3 от набегающего потока воздуха, что позволяет полностью устранить погрешности, обусловленные ошибками в определении площадей характерного сечения, и безразмерных коэффициентов сопротивления тел, входящих в устройство для градуировки акселерометров 1.2 ил.уЁ-1^1СЛго!Ю
| Синельников А.Е | |||
| Низкочастотные, линейные акселерометры | |||
| Методы и средства поверки и градуировки | |||
| - М.; Изд-во стандартов, 1979..Авторское свидетельство СССР М»1589217,кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
