Изобретения относятся к измерительной технике и предназначены для обеспечения контроля метрологических характеристик средств измерения параметров движения и ориентации объектов в пространстве.
Известно устройство для градуировки измерителей параметров движения, содержащее средство воспроизведения параметров движения в виде привода с вертикальной осью вращения с закрепленной на его валу платформой для размещения градуируемого измерителя, в котором задатчик параметров движения выполнен в виде диска со спиралевидным профилем рабочей поверхности (патент РФ № 1483383, кл. G 01 Р 21/00, 1986 г.).
Это устройство обладает невысокими функциональными возможностями и ограниченным диапазоном контроля метрологических характеристик измерителя.
Известен способ определения параметров прецизионных акселерометров, в котором его устанавливают на вертикальное основание, поворачивают основание вокруг горизонтальной оси на заданные углы от начального положения, затем акселерометр разворачивают вокруг оси чувствительности на основании на угол 180°, при этом вычисляют по его выходным сигналам отдельно погрешности базовых установочных элементов акселерометра и угловую деформацию основания (патент РФ № 2117950, кл. G 01 P 21/00, 1994 г.).
Указанный способ обладает невысокой точностью в связи с неоднократными переустановками акселерометра на плоскости основания и сложен при использовании для реальной конструкции преобразователя.
Известен способ определения угловых координат измерительной оси акселерометра для настройки и калибровки акселерометров и приборов, содержащих акселерометры, в котором производят первый и второй развороты акселерометра из начального положения вокруг осей, расположенных в плоскости горизонта на заданные углы, причем угловые координаты относительно ортогонального базиса определяют из приведенных в описании соотношений (патент РФ № 2164693, кл. G 01 Р 21/00, 1999 г.).
Указанный способ обладает невысокими функциональными возможностями и не является универсальным для приборов разного типа, содержащих акселерометры.
Для всех указанных выше способов и устройств испытаний приборов, содержащих блок акселерометров, общим недостатком является то, что в силу изменяющихся условий эксплуатации такие приборы нуждаются в периодической проверке и тестировании с целью определения их метрологических параметров, например таких, как масштабный коэффициент и значение нулевого отсчета. Для этого приборы снимаются с мест их установки, переносятся в измерительную лабораторию, где на специальном оборудовании поверяются. Недостатком этой операции является трудность повторного позиционирования блоков акселерометров в месте их установки. Требуемая идентичность их повторного позиционирования иногда может достигать нескольких угловых секунд, что представляет сложную техническую задачу.
Известны способ электрического возбуждения резонансных колебаний пьезоэлектрического акселерометра и устройство для его осуществления (патент № 2150708, кл. G 01 Р 21/00, 1999 г.), а также способ дистанционного периодического контроля коэффициента преобразования пьезоэлектрического акселерометра (патент № 2176396, кл. G 01 Р 21/00, 2000 г.), которые позволяют повысить точность измерения вибраций при длительной эксплуатации акселерометра без возможности временного демонтажа его с объекта измерения.
Однако указанные технические решения имеют ограниченную область применения по типу преобразователя и невысокие метрологические возможности.
Наиболее близкими техническими решениями с точки зрения обеспечения универсальности их применения для различных типов преобразователей, содержащих акселерометры и приближения испытательных режимов к эксплуатационным являются способ проверки работоспособности акселерометра и реализующее способ устройство, в которых совмещается режим контроля с рабочим режимом акселерометра, при этом поверяемый акселерометр установлен на вибрирующем основании, а электронная схема обработки сигнала акселерометра разделяет рабочие, поверочные и эталонные сигналы и по результатам их сравнения судят об исправности акселерометра (патент РФ № 2078346, кл. G 01 Р 21/00, 1990 г.).
Недостатком известных способа и устройства является узкий диапазон функциональных возможностей дистанционного контроля преобразователей с акселерометрами, относительная сложность и неоперативность получения результатов контроля и, как результат, уменьшение надежности и точности измерений преобразователя.
Техническим результатом предлагаемых изобретений является устранение указанного недостатка, а также недостатков указанных выше технических решений и заключается в обеспечении расширения функциональных возможностей и автоматизации процесса проверки и тестирования блока акселерометров и повышения надежности и точности измерений преобразователя.
Сущность изобретений заключается в том, что указанный технический результат для способа дистанционного тестирования блока акселерометров в составе измерительного преобразователя достигается тем, что периодически производят тестирование блока акселерометров в месте установки преобразователя, для чего сначала исключают жесткую сцепку блока акселерометров с корпусом преобразователя, затем возбуждают в блоке акселерометров механические колебания, после чего посредством этих акселерометров измеряют уровень вызванных механических колебаний, а результат измерений сравнивают с номинальными значениями и судят о работоспособности и погрешности акселерометров блока.
Кроме того, разницу между результатом измерений и номинальным значением для каждого акселерометра в последующих измерениях могут использовать как поправку к результату измерения.
Указанный технический результат для устройства дистанционного тестирования блока акселерометров в составе измерительного преобразователя, содержащего блок из трех акселерометров с взаимно ортогональными осями, корпус и электронную схему обработки сигналов блока акселерометров, достигается тем, что в него дополнительно введены электромагнит, первая и вторая пружины и арретир, причем арретир жестко связан с корпусом и находится в зацеплении с блоком акселерометров, который жестко закреплен на одном конце первой пружины, другой конец которой жестко закреплен на корпусе, а электромагнит закреплен на корпусе так, что между ним и тем концом первой пружины, на котором закреплен блок акселерометров, образован зазор, в котором расположена вторая пружина.
Кроме того, в качестве второй пружины может быть использована плоская прокладка из пористой резины толщиной от 1,0 до 3,0 мм.
Кроме того, электронная схема обработки сигналов блока акселерометров может содержать три усилителя напряжения, три аналого-цифровых преобразователя, микропроцессор и усилитель тока, причем выходы акселерометров через соответствующие усилители напряжения соединены с входами соответствующих аналого-цифровых преобразователей, выходы которых подключены к входам микропроцессора, первый выход которого является выходом устройства, а второй выход микропроцессора соединен через усилитель тока с обмоткой электромагнита.
На фиг.1 представлена структурная схема устройства.
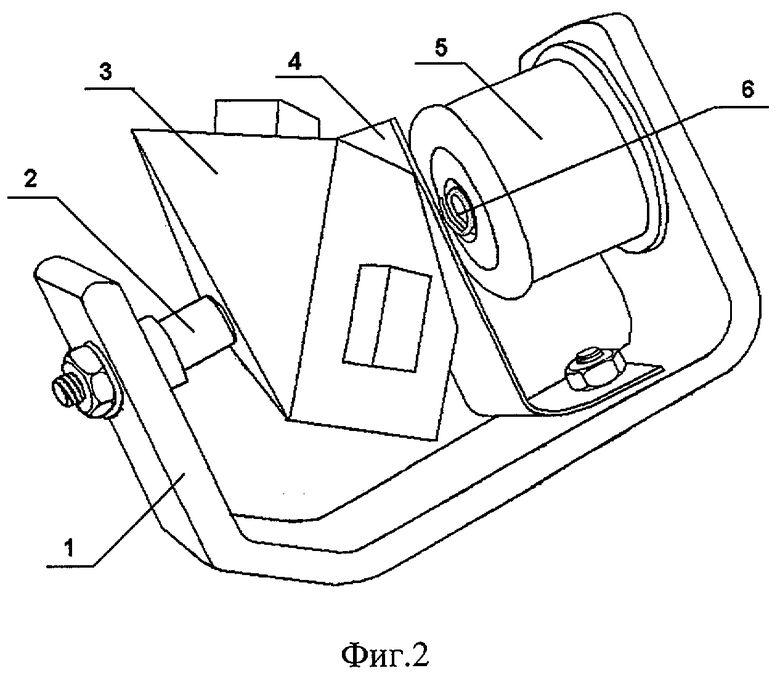
На фиг.2 представлен пример конструктивного выполнения заявляемого устройства.
На фиг.1 и 2 используются следующие обозначения позиций: 1 - корпус, 2 - арретир, 3 - блок акселерометров, 4 - первая пружина, 5 - электромагнит, 6 - вторая пружина, 7, 8 и 9 - три усилителя напряжения, 10, 11, 12 - три аналого-цифровых преобразователя, 13 - микропроцессор, 14 - первый выход микропроцессора и выход устройства в целом, 15 и 17 - второй и третий выходы микропроцессора, 16 и 18 - усилители тока.
Устройство работает следующим образом.
В исходном состоянии блок акселерометров (3) под действием первой пружины (4) прижимается к арретиру (2) и в таком положении оказывается жестко зафиксирован. При подаче определенной величины постоянного тока на обмотку электромагнита (5) первая пружина (4) отжимается под действием магнитодвижущей силы электромагнита и блок акселерометров (3) снимается с арретира (2). Но перемещение блока акселерометров (3) ограничивается второй пружиной (6). Таким образом, блок акселерометров (3) оказывается в упругом подвесе.
При подаче на обмотку электромагнита (5) дополнительно переменного тока определенной величины блок акселерометров (3) подвергается механическим колебаниям, возбуждаемым переменной составляющей электродвижущей силы электромагнита. Эти колебания воспринимаются всеми тремя акселерометрами и преобразуются в электрические сигналы на их выходах. Измеряя амплитуды переменных составляющих в выходном сигнале каждого акселерометра можно оценить коэффициент передачи данного акселерометра к заданному возбуждающему механическому воздействию. Таким образом осуществляется поверка акселерометров в составе устройства.
В автоматическом режиме микропроцессор (13) по программе, периодически, например один раз в сутки, подает на усилитель тока (16) первый сигнал, вызывающий на его выходе и в обмотке электромагнита (5) постоянный ток определенной величины. Это приводит к раззаретированию блока акселерометров. После этого микропроцессор (13) подает на усилитель тока (16) второй сигнал, вызывающий на его выходе и в обмотке электромагнита (5) дополнительную переменную составляющую тока, например меандр. В результате блок акселерометров (3), как указано было ранее, подвергается механическим колебаниям, которые измеряются акселерометрами и через усилители (7), (8), (9) и аналого-цифровые преобразователи (10), (11) и (12) поступают на входы микропроцессора (13), где сравниваются с номинальными значениями. В случае превышения отклонений амплитуд переменных составляющих заранее заданную величину микропроцессор (13) формирует на своем выходе аварийный сигнал.
Практическое испытание заявляемого устройства показало, что в качестве второй пружины может быть использована резиновая прокладка толщиной от 1,0 до 3,0 мм из пористой резины.
Положительный эффект достигается тем, что заявляемое устройство не требует демонтажа для проведения тестирования, а эта операция может периодически осуществляться на месте установки заявляемого устройства в течение всего срока его службы. Кроме того, заявляемое устройство допускает поверку блока акселерометров по проводам с удаленного места.
Таким образом, предлагаемые изобретения позволяют достичь технический результат, заключающийся в обеспечении расширения функциональных возможностей и автоматизации процесса проверки и тестирования блока акселерометров и повышения надежности и точности измерений преобразователей, в состав которых входит этот блок акселерометров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| СПОСОБ ИЗМЕРЕНИЯ УКЛОНОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2227899C1 |
| ТРЕХКООРДИНАТНЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2376607C1 |
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ПРОДОЛЬНОЙ ДЕФОРМАЦИИ ПОВЕРХНОСТИ И ЭКСТЕНЗОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575795C2 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| СПОСОБ КОНТРОЛЯ МЕТРОЛОГИЧЕСКОЙ ИСПРАВНОСТИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2321829C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
Изобретение относится к измерительной технике и предназначено для обеспечения контроля метрологических характеристик средств измерения параметров движения и ориентации объектов в пространстве. Изобретение направлено на обеспечение возможности автоматизации процесса проверки и тестирования акселерометров, повышения надежности и точности измерений преобразователей, в состав которых входят эти акселерометры. Этот результат обеспечивается за счет того, что при осуществлении способа периодически производят тестирование блока акселерометров в месте установки преобразователя, для чего сначала исключают жесткую сцепку блока акселерометров с корпусом преобразователя, затем возбуждают в блоке акселерометров механические колебания, после чего посредством этих акселерометров измеряют уровень вызванных механических колебаний, а результат измерений сравнивают с номинальными значениями и судят о работоспособности и погрешности акселерометров блока. При этом разницу между результатом измерений и номинальным значением для каждого акселерометра в последующих измерениях используют как поправку к результату измерения. Устройство содержит блок из трех акселерометров с взаимно ортогональными осями, корпус и электронную схему обработки сигналов блока акселерометров. Кроме того, дополнительно введены электромагнит, первая и вторая пружины и арретир, причем арретир жестко связан с корпусом и находится в зацеплении с блоком акселерометров, который жестко закреплен на одном конце первой пружины, другой конец которой жестко закреплен на корпусе, а электромагнит закреплен на корпусе так, что между ним и тем концом первой пружины, на котором закреплен блок акселерометров, образован зазор, в котором расположена вторая пружина. 2 н. и 3 з.п. ф-лы, 2 ил.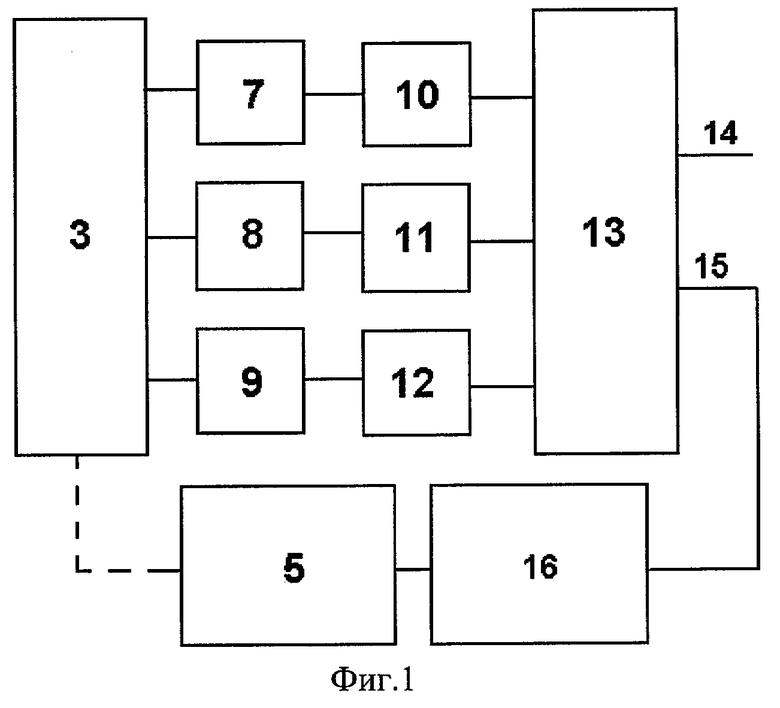
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ АКСЕЛЕРОМЕТРА | 1990 |
|
RU2078346C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ КОЛЕБАНИЙ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2150708C1 |
| СПОСОБ ДИСТАНЦИОННОГО ПЕРИОДИЧЕСКОГО КОНТРОЛЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2000 |
|
RU2176396C1 |
| Устройство для градуировки измерителей параметров движения | 1986 |
|
SU1483383A1 |
| DE 19844911 A, 20.04.2000 | |||
| US 5274576 A, 28.12.1993. | |||

