Изобретение относится к неразрушающему контролю качества полупроводников.ых приборов (ПП) и интегральных микросхем (ИМС) и может применяться для отбраковки ПП и ИМС со скрытыми дефектами.
Целью изобретения является уменьшение времени контроля.
Способ включает в себя определение частоты среза низкочастотных шумов, измерение характеристик шумов элементов обучающей выборки, установление порога . отбраковки, измерение характеристик шуMOB элементов контролируемой партии и отбраковку элементов со значениями шумовых характеристик, превышающими порог отбраковки.
Поставленная цель достигается тем, что характеристики низкочастотных шумов измеряют в полосе частот с верхней граничной частотой, равной частоте среза, разбивают полный диапазон мгновенных значений шумового сигнала на m равныхинтервалов, измеряют времена пребывания шумового сигнала каждого элемента выборки в пределах каждого i-ro интервала, находят 1-й интервал, характеризующийся максимальным значением показателя (р вычисляемого по формуле
(Ц|2-/Л1)
где jMii , Oil и //i2 , Oi2 - оценки математических ожиданий и среднеквадратических отклонений измеренных времен пребывания шумового сигнала соответственно надежных и потенциально-дефектныхэлементов в i-M интервале, и проводят отбраковку элементов контролируемой партии, у которых измеренное значение времени пребывания шумового сигнала в 1-м интервале больше
величины П /Лт д +ст 2 ;а|1или меньше этой же величины.при /л-1 Л2Период измерения времени пребывания шумового сигнала в пределах одного интервала одинаков для элементов обучающей выборки и контролируемой партии.
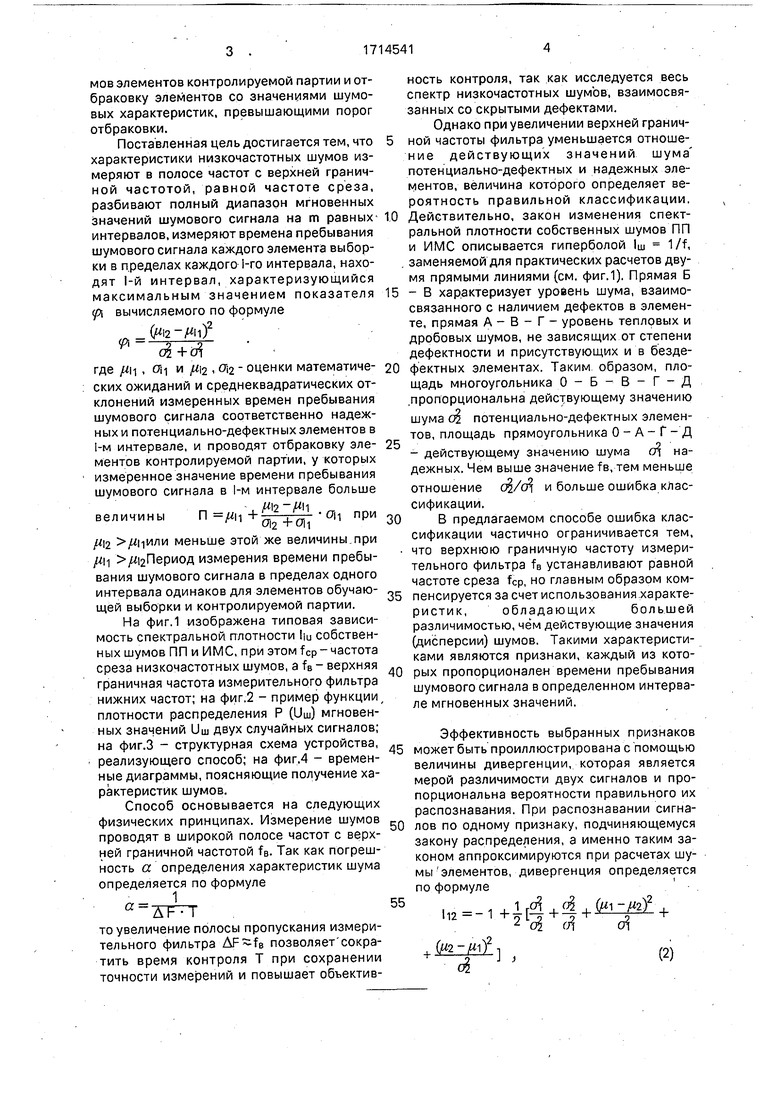
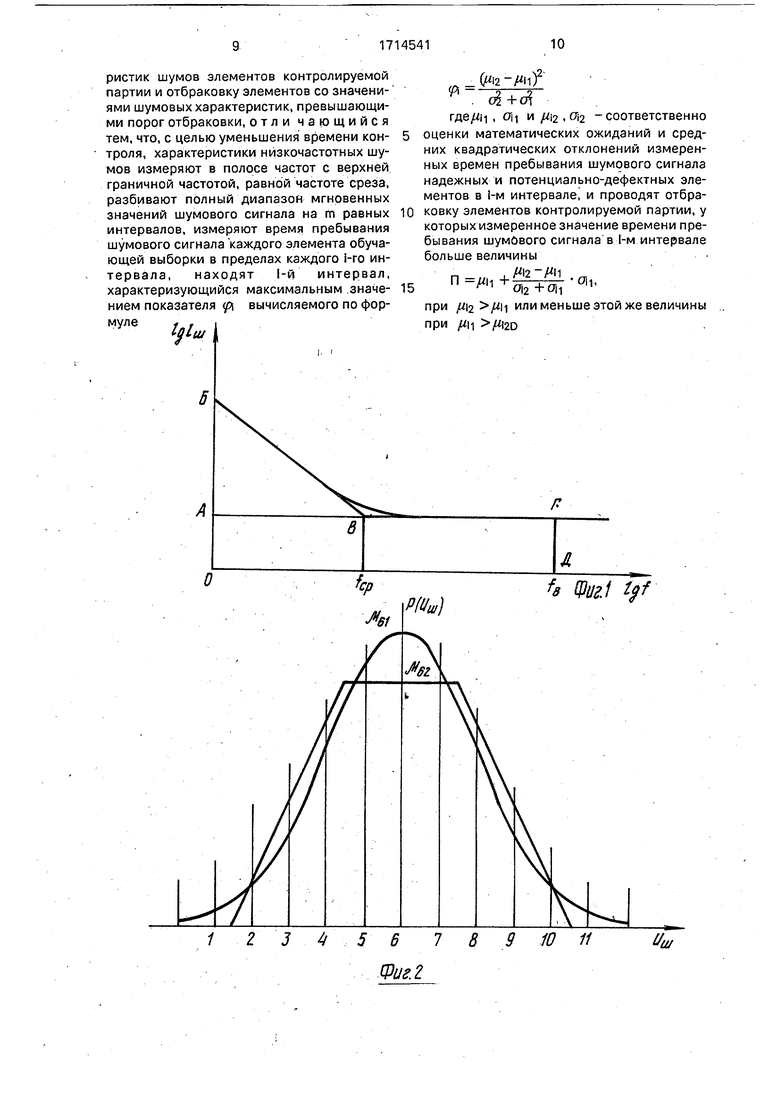
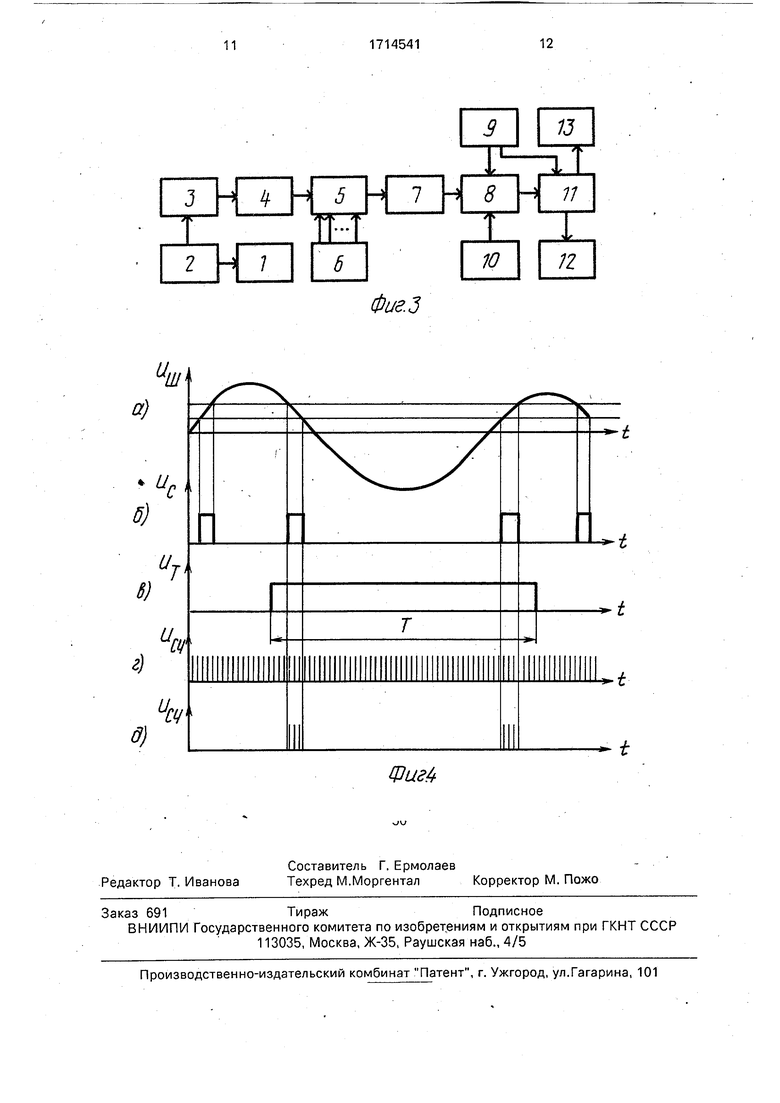
На фиг.1 изображена типовая зависимость спектральной плотности liu собственных шумов ПП и ИМС, при этом fcp-частота среза низкочастотных шумов, а fa- верхняя граничная частота измерительного фильтра нижних частот; на фиг.2 - пример функции, плотности распределения Р (Уш) мгновенных значений Уш двух случайных сигналов; на фиг.З - структурная схема устройства, реализующего способ; на фиг.4 - временные диаграммы, поясняющие получение характеристик шумов.
Способ основывается на следующих физических принципах. Измерение шумов проводят в широкой полосе частот с верхней граничной частотой fe. Так как погрешность а определения характеристик шума определяется по формуле
етЦ
то увеличение полосы пропускания измерительного фильтра позволяетсократить время контроля Т при сохранении точности измерений и повышает объективность контроля, так как исследуется весь спектр низкочастотных шумов, взаимосвязанных со скрытыми дефектами.
Однако при увеличении верхней граничной частоты фильтра уменьшается отношение действующих значений шума потенциально-дефектных и надежных элементов, величина которого определяет вероятность правильной классификации.
Действительно, закон изменения спектральной плотности собственных шумов ПП и ИМС описывается гиперболой 1ш 1/f, заменяемой для практических расчетов двумя прямыми линиями (см. фиг.1). Прямая Б
- В характеризует уровень шума, взаимосвязанного с наличием дефектов в элементе, прямая А - В - Г - уровень тепловых и дробовых шумов, не зависящих от степени дефектности и присутствующих ив бездефектных элементах. Таким образом, площадь многоугольника 0-Б-В-Г-Д .пропорциональна действующему значению
шума с потенциально-дефектных элементов, площадь прямоугольника О - А - Г - Д
- действующему значению шума о надежных. Чем выше значение fa, тем меньше
отношение (л и больше ошибка классификации.
В предлагаемом способе ошибка классификации частично ограничивается тем, что верхнюю граничную частоту измерительного фильтра fa устанавливают равной частоте среза fcp, но главным образом компенсируется засчетиспользования.характеристик, обладающих большей различимостью, чём действующие значения (дисперсии) шумов. Такими характеристиками являются признаки, каждый из которых пропорционален времени пребывания шумового сигнала в определенном интервале мгновенных значений.
Эффективность выбранных признаков может быть проиллюстрирована с помощью величины дивергенции, которая является мерой различимости двух сигналов и пропорциональна вероятности правильного их распознавания. При распознавании сигналов по одному признаку, подчиняющемуся закону распределения, а именно таким законом аппроксимируются при расчетах шумы элементов, дивергенция определяется по формуле
05 о101
+ fc:/il i
(2) где , оценка математического ожидания и Дисперсии признаков k-ro класса элементов (k 1.2). При распознавании сигналов с равными средними и разными дисперсиями дивергенция равнаi H,Mz 2о -oi а при распознавании сигналов с разными средними и одинаковыми дисперсиями H, (ffl i Пример, Требуется различить два класса случайных сигналов, средние.Значения которых равны нулю. Мгновенные значения УШ одного из них распределены по нормальному закону, второго - по трапецеидальному (см. фиг.2). Средние квадратические отклонения обоих сигналов совпадают, т.е. 7i с. Распознавание сигналов по действующему значению, т.е. по дисперсии, приведет к заключению, что сигналы относятся к одному классу, так как о с. Дивергенция,определяемая в этом случае по формуле (3), равна нулю. При распознавании сигналов по предлагаемым признакам вероятность ошибки значительно меньше, так как почти все признаки имеют разные средние значения //k Наиболее целесообразно в данном примере для распознавания сигналов использовать признак под номером 6 с максимальной разностью средних значений. Величина дивергенции сигналов по этому признаку, определяемая по формуле (4), составляет 39,2... По графикам, приведенным в ряде Источников, можно установить, что при дивергенции, равной нулю, вероятность ошибки распознавания равна 0,5; а при Ii2 39,2 она составит 0,15. Таким образом, использование предлагаемого признака для рассмотренного примера снижает вероятность ошибки классификации на 0,35. Поскольку реальные распределения шу-, мов надежных и потенциально-дефектных элементов различаются в меньшей степени, чем распределе1ние сигналов в рассмотренном примере, то практически вероятность ошибки классификации может снизиться на величину 0,1 - 0,2, что и подтверждается экспериментом. Способ может быть реализован с помощью устройства, структурная схема которого приведена на фиг.З. Устройство содержит датчик 1 с контролируемым эл ментрм, предварительный усилитель 2, фильтр 3 нижних частот, развертывающий усилитель 4, блок 5 квантования, состоящий из m однотипных линеек, каждая из которых настроена на определенный интервал напряжения, блок 6 управления, выходной усилитель. 7, схему 8 совпадения, блок 9 задания времени анализа, генератор 10 импульсов, счетчик 11, индикатор 12 и пороговое устройство 13. Устройство работает следующим образом. Шумовой сигнал снимается с контролируемого элемента с помощью датчика 1, роль которого выполняет печатная плата с резисторами, используемая для задания требуемого режима работы элемента, и подается на вход предварительного усилителя 2. Предварительный усилитель 2 служит для усиления сигнала и согласования выхода контролируемого элемента с входом фильтра 3 нижних частот, предназначенного для выделения требуемой полосы частот. Развертывающий усилитель 4 обеспечивает подачу на блок 5 квантования симметричного относительно нуля напряжения Dm (см.фиг. 4а). Блок 5 осуществляет квантование напряжения и выделение сигнала в требуемом интервале. Для этого с блока буправления подается сигнал, включающий соответствующую линейку в блоке 5 квантования. Строб Uc, соответствующий по длительности времени пребывания шумового сигнала в пределах выбранного интервала (см. фиг. 46), с выхода блока 5 через выходной усилитель 7 поступает н-а вход схемы 8 совпадения. При одновременном присутствии на входах схемы 8 совпадения строба с выхода усилителя 7 и импульса напряжения UT, задающего время измерения шумового сигнала Т (см. фиг. -4в) и поступающего с блока 9 задания времени анализа, счетные импульсы Uc4 с генератора 10 импульсов (см.фиг. 4г) поступают на счетчик 11 пакетами (см. фиг. 4д). Число импульсов, пропорциональное времени пребывания сигнала в заданном интервале мгновенных значений, фиксируется на индикаторе 12. В процессе обучения наборы этих чисел, соответствующие разным интервалам квантования для каждого элемента обучающей выборки, служат для определения величин р- с целью вЦ1явления наиболее инфор|у|ативного признака и порога классификации П. По результатам обучения выбирается .наиболее информативный, интервал кванто вания и в пороговом устройстве 13 записывается порог классификации П. В дальнейшем выделенный интервал квантования используется для классификации контролируемых элементов.
Число информативных признаков (интервалов квантования) m определяет достоверность классификации наряду с величинами времени анализа Т и полосы пропускания ЛР. Установить число m можно по одной из известных методик, если задаться требуемой точностью определения признаков а величинами А RA Fjsf ср) и Т. Например, при ЛР 20 кГц, Т 10сит 10 обеспечивается достаточно высокая точность определения признаков: ,8,..8%.
Экспериментальная проверка эффективности способа была проведена на партиях микросхем серий 140УД1А, 153УД1 и 153УД2. Предварительно каждая из партий микросхем объемом 200.шт. была подвергнута разбраковке по спектральной плотности мощности шумов, измеряемой на частотах 10, 100, 10 000 Гц. Время измерения N было принято равным 3 мин, что-соответствует значению, а ± 5%. Критерием отнесения микросхемы к потенциально-дефектным был принят выход значения спектральной плотности мощности за величину среднего крадратического отклонения, характерную для данной партии микросхем, хотя бы на одной из контрольных частот.
Из разбракованных таким образом микросхем была составлена обучающая выборка, включающая 10 надежных (класс 1) и 10 потенциально-дефектных ИМС (класс 2), а также экзаменационная выборка объемом 50 ИМС, в которую были отобраны элементы обоих классов из числа наиболее сложных для классификации, т.е. имеющие характеристики, близкие к порогу забракования.
В процессе обучения предварительно выявлялась микросхема снаибольшим уровнем шума и по нему в развертывающем усилителе 4 устанавливался коэффициент усиления, обеспечивающий наибольший допустимый размах колебаний напряж.ения на входе блока 5 квантования. После этого с помощью блока 6 управления включалась первая линейка блока 5 квантования и измерялось время пребывания шумового сигнала в первом интервале квантования. Время измерения Т 10 с. Затем с помощью блока 6 управления включалась вторая линейка блока 5 квантования и измерялось время пребывания шумового сигнала во втором интервале. Аналогично были замерены все остальные признаки, характерные для этой микросхемы, Перечисленные oneрации последовательно повторялись для каждой из микросхем обучающей выборки.
По результатам измерений были определены среднее арифметическое значение
и среднее квадратическое отклонение измеренных времен по каждому интервалу напряжений для обоих классов элементов обучающей выборки по формулам
Е -tikj ;
(5)
,r
2 ftikj - Wik) (7ik
n-11
где tikj - время пребывания шумового сигнала j-ro элемента обучающей выборки Q 1 ,п), относящегося к классу (k 1,2), в i-м интервале напряжений (,т).
Полученные значения использовались для:
1) выявления наиболее информативного признака под номером I (I 1, т), который характеризуется наибольшим значением дивергенции.
(«11-/Л2)
(f max
ii
2) установление порога классификации
.
где ju(,, aik - параметры, определяемые по формулам(5)и (6) для зафиксированного 1-го интервала.
Собственно процесс контроля микросхем заключается в измерении времени пребывания низкочастотных шумов каждого j-ro контролируемого элемента tj (j 1 ,N, где N - объем контролируемой партии; в ходе эксперимента N 50) в пределах выбранного информативного интервала и сравнении его с пороговым значением П. Элемент отбраковывался при tj П в случае, когда/Л2 или при tj П, когда / Время измерения так же, как и в процессе обучения,составляло 10 с.
В результате эксперимента с экзаменационной выборкой были по-разному классифицированы известным и предлагаемым способами по две микросхемы серий 153УД1 и 153УД2 (4% от партии) и одна микросхема .серии 140УД1А(2% от партии). Это означает, что при незначительно отличающихся результатах классификации предлаг.аемый способ существенно (со 180 до 10 с) сокращает время контроля.
Формула изобретения Способ разбраковки полупроводникЬвых приборов и микросхем, включающий определение частоты среза низкочастотных, шумов, измерение характеристик шумов элементов обучающей выборки, установление порога отбраковки, измерение характеристик шумов элементов контролируемой партии и отбраковку элементов со значениями шумовых характеристик, превышающими порог отбраковки, отли чающийся тем, что, с целью уменьшения времени контроля, характеристики низкочастотных шумов измеряют в полосе частот с верхней граничной частотой, равной частоте среза, разбивают полный диапазон мгновенных значений шумового сигнала на m равных интервалов, измеряют время пребывания шумового сигнала каждого элемента обучающей выборки в пределах каждого i-ro интервала, находят 1-й интервал, характеризующийся максимальным .значением показателя вычисляемого по формуле , Т
/ г J
l/f.
56 789 10 11
ш Фиг.2 ( . № .Ci2 -соответственно оценки математических ожиданий и средних квадратических отклонений измеренных времен пребывания шумового сигнала надежных и потенциально-дефектных элементов в i-M интервале, и проводят отбраковку элементов контролируемой партии, у которыхизмеренное значение времени пребывания шумового сигнала в 1-м интервале больше величины «12-Ди при //12 Я1 ИЛИ меньше ЭТОЙ же величины при //и (I2D 4 te/ /// «Л


Изобретение относится к неразрушающему контролю качества полупроводниковых приборов (ПП) и интегральных микросхем (ИМС) и может-быть использовано для отбраковки ПП и ИМС со скрытыми дефектами. Цель изобретения - уменьшение времени контроля - достигается за счет использования характеристик шумового сигнала, обладающих повышенной различимостью. Способ предусматривает измерение характеристик шумового сигнала элементов обучающей выборки в полосе частот, ограниченной сверху частотой среза. При этом измеряют времена пребывания сигнала каждого элемента выборки в каждом из m интервалов, на которые разбивают полный диапазон мгновенных значений шумового сигнала. Затем находят 1-й интервал, характеризующийся максимальным значением показателя дивергенции, определяемый по формуле, приведенной в описании изобретения. Проводят отбраковку элементов контролируемой партии, у которых значение времени и пребывания шумового сигнала в 1-м интервале больше величинып=.и.^^-.,при («ii ИЛИ меньше ЭТОЙ величины при где - оценки математических ожиданий и средне- квадратических отклонений времен пребывания шумового сигнала в 1-м интервале соответственно надежных и потенциально- дефектных элементов обучающей выборки. Устройство для реализации способа содержит датчик 1 с контролируемым элементом, усилитель 2, фильтр 3, развертывающий усилитель 4, блок 5 квантования, блок 6 управления, выходной усилитель 7, схему 8 совпадения, блок 9 задания времени анализа, генератор 10 импульсов, счетчик 11, индикатор 12 и пороговое устройство 13. 4 ил.LOС^^ елji^
| Пряников B.C | |||
| Прогнозирование отказов полупроводниковых приборов - М'.: Энергия, 1978.Домарацкий Д.Н, Иванов Л.Н | |||
| Юрлов Ю.И | |||
| Многоцелевой статистический aHanVis случайных сигналов | |||
| - Новосибирск; Наука, 1975.Авторское Свидетельство СССР № 878032, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
