Изобретение относится к области методов обработки сигналов в системах контроля трубопроводов и протяженных конструкций.
Известен способ обнаружения дефектов в трубопроводах [Пат. 2439551 РФ МПК G01N 29/04. Способ обнаружения дефектов в трубопроводах / Алексеев С.П. и др.]. Способ заключается в том, что устанавливают акустические датчики, фиксируют акустические колебания, определяют местоположение дефекта на контролируемом участке трубопровода и регистрируют его, при этом акустические колебания фиксируют на моде радиальных колебаний круговых полых цилиндров на поперечном пьезоэффекте в полосе частот спектра 1-25 кГц, при этом токосъемные электроды нанесены на боковых поверхностях полого цилиндра, внутри трубопровода размещен диагностический модуль, также снабженный акустическими датчиками, посредством которых определяют нелинейные свойства контролируемой среды путем определения функции, связывающей давление реакции среды с давлением возмущения, при этом излучающие и приемные датчики устанавливают на расстояниях l/lσ=1 друг от друга, излучают акустические сигналы на частотах 140 и 150 кГц, определяют нормированные гистограммы плотности вероятности для каждого сигнала, путем полиноминального приближения определяют аналитическое выражение для каждой гистограммы, вычисляют функцию нелинейности и значения моментных функций, которые характеризуют изменение формы закона нормального распределения, по изменению формы закона распределения определяют инородные включения в контролируемой среде [1].
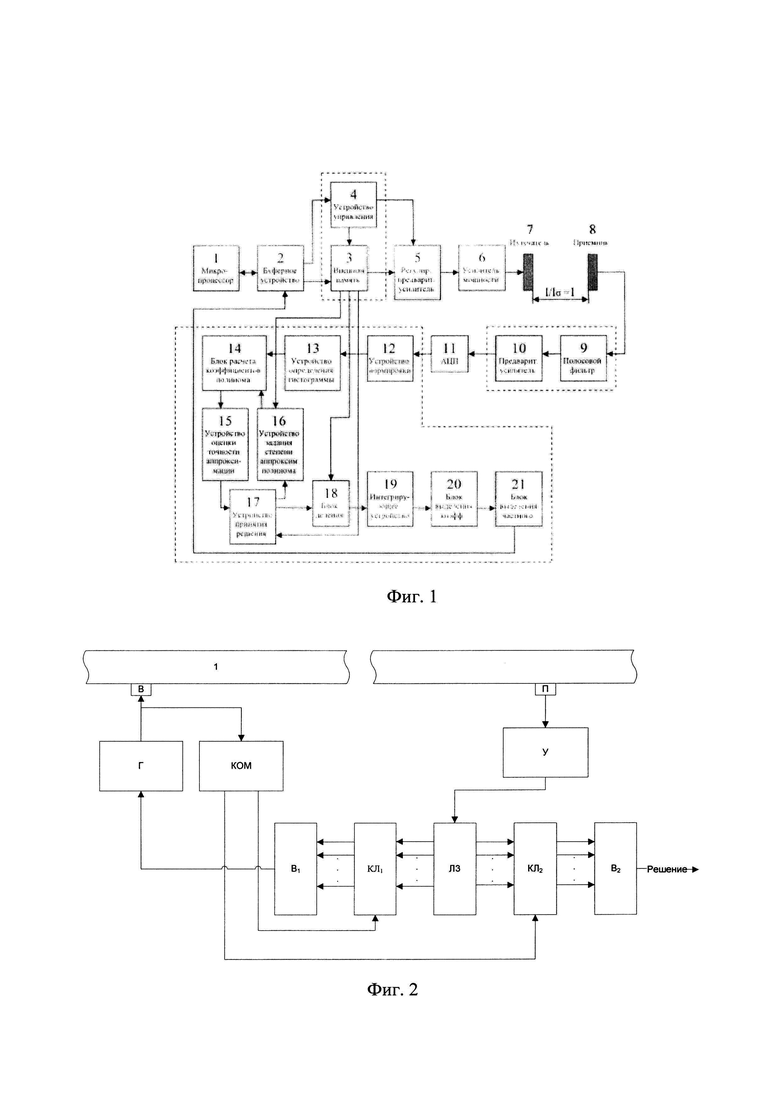
Сущность предлагаемого технического решения поясняется чертежом (Фиг. 1). Структурная схема аналога, представленная на фиг. 1, включает: микропроцессор 1, буферное устройство 2, внешнюю память 3, устройство управления 4, регулируемый предварительный усилитель 5, усилитель мощности 6, излучатель 7, приемник 8, полосовой фильтр 9, предварительный усилитель 10, АЦП 11, устройство нормировки 12, устройство определения гистограммы 13, блок 14 расчета коэффициентов полинома, устройство 15 оценки точности аппроксимации, устройство 16 задания степени аппроксимирующего полинома, устройство принятия решения 17, блок 18 деления, интегрирующее устройство 19, блок 20 выделения коэффициентов при первых двух членах разложения 20, блок 21 вычисления частного.
В микропроцессоре 1 формируются излучающие сигналы и параметры работы. Через буферное устройство 2 информация с микропроцессора 1 поступает на внешнюю память 3 и устройство управления 4. Устройство управления 4 управляет работой внешней памяти и регулируемым предварительным усилителем 5. Усилитель мощности 6 усиливает сигнал и подает его на излучатель 7.
Сигналы с приемника 8 поступают на полосовой фильтр 9 и предварительный усилитель 10, которые образуют блок предварительной обработки. Сигналы оцифровываются посредством АЦП 11. Далее цифровой сигнал поступает на устройство нормировки 12 и устройство определения гистограммы 13. Устройство 16 задает степень аппроксимирующего полинома и управляет работой блока расчета коэффициентов полинома 14. Далее производится оценка точности аппроксимации 15 и данные передаются на устройство принятия решения 17, которое управляется блоком управления 4. При этом, если точность не удовлетворяет заданному порогу, то увеличивается степень полинома. Увеличение происходит до тех пор, пока точность аппроксимации не будет удовлетворительной. В блоке 18 производится деление выражения для плотности вероятности излучаемого сигнала, которая считывается из внешней памяти 3, и полученной плотности вероятности в блоке 14.
Интегрирующее устройство 19 представляет полученный результат на блок выделения коэффициентов при первых двух членах разложения 20, и в блоке 21 производится вычисление частного. Полученный результат через буферный элемент выводится на микропроцессор 1.
Сигналы с АЦП 11 записываются на жесткий диск микропроцессора 1. Каждый отчет кодируется в 14 разрядном формате. На вход алгоритма поступают данные, на основе которых производится определение нормированных гистограмм плотности вероятности для каждого сигнала. Затем, используя полиноминальное приближение, определяется аналитическое выражение плотности вероятности для каждой гистограммы. В зависимости от исследования (обнаружение дефектов в трубопроводах или поиск мест утечек транспортируемого продукта) вычисляется либо функция нелинейности, либо значения моментных функций, которые характеризуют изменение формы закона распределения (в случае детектирования инородных включений в среде).
Первым недостатком данного способа-аналога является отсутствие классификатора, который бы позволял относить полученный накопленный сигнал к определенной форме распределения. Вторым недостатком является пересечение доверительных интервалов регистрируемых моментов распределений для сигналов различных форм, что не позволяет гарантировать принадлежность получаемого сигнала к одной конкретной форме (эталону).
Наиболее близким к заявляемому является способ [2], указанный в патенте-прототипе [Пат. 2016135127 Способ обнаружения и классификации изменений параметров оболочки трубопровода и окружающей его среды / Епифанцев Б.Н., Комаров В.А., Нигрей Н.Н., Ищак Е.Р.]. На фиг. 2 представлена схема прототипа.
В прототипе виброакустические сигналы возбуждают следующие друг за другом воздействия на передающую среду через интервалы, превышающие интервал корреляции существующих в ней виброакустических шумов, отсчеты регистрируемых реакций на каждое воздействие на другом конце контролируемого участка суммируют с ранее полученными аналогичными отсчетами, модуль результирующего сигнала нормируют и принимают за плотность распределения временных интервалов отсчетов от начала до конца сформированного в сумматоре сигнала. При каждом приеме и накоплении воздействия по его распределению вычисляют оценки математического ожидания, среднеквадратичного отклонения, асимметрии и эксцесса и далее строятся их линии регрессии. Первый патентуемый классификатор оценивает расстояния и углы между всеми попарными комбинациями линий регрессии с целью отнесения текущего воздействия к определенной форме. Расстояние между линиями регрессии определяется по формуле (1) как модуль разницы между средними значениями этих линий:

где d - расстояние между линиями регрессии, p1 - значения линии регрессии первого параметра, р2 - значения линии регрессии второго параметра.
Угол вычисляется на основе скалярного произведения векторов, в качестве которых выступают линии регрессии (2):

где α - угол между линиями регрессии,  - вектор линии регрессии первого параметра,
- вектор линии регрессии первого параметра,  - вектор линии регрессии второго параметра.
- вектор линии регрессии второго параметра.
На основе вычисленных параметров d и α принимается решение об отнесении сигнала к определенной форме. Для этого необходимо иметь соответствующую базу данных эталонных значений параметров, что требует индивидуальной калибровки.
Резюмируя свойства аналога и прототипа можно констатировать, что они используют косвенные методы измерения распределения, что ведет к усложнению структуры и алгоритмов обработки сигналов.
Целью патентуемого способа является упрощение алгоритмов обработки и повышение их эффективности за счет использования прямого метода измерения формы распределений.
Акустический способ контроля протяженных объектов основан на анализе случайных сигналов. При использовании S-тестера в качестве метода контроля объекта можно отнести полученный импульс к определенному классу сигналов с использованием шкалы преобразования идентификационного параметра к определенному виду сигнала. Суть предлагаемого решения состоит в применении специального инструмента - идентификационного тестера (ИТ), статическая характеристика которого (на примере ИТ, так называемого S-типа) описывается таблицей 1.
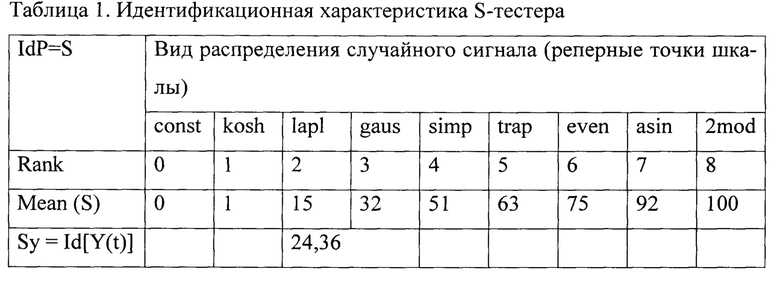
Таблица 1 представляет собой шкалу, которая связывает порядковые номера (Rank) отсчетов с выходными числовыми параметрами (Mean S) ИТ и качественными характеристиками следующих видов распределений случайных сигналов: двумодального (2mod), арксинусного (asin), равномерного (even), трапецеидального (trap), треугольного (simp), нормального (gaus), двустороннего экспоненциального (lapl) и Коши (kosh). Начальный отсчет (const) имеет нулевое значение и относится к постоянным во времени сигналам. Имена распределений взяты из словаря имен случайных сигналов, принятых в области статистических измерений [3].
В нижней строке таблицы 1 представлен пример измерения некоторого сигнала, показания которого для S-тестера составили Sy=24,36. Интерполяция этих показаний позволяет утверждать, что исследуемый сигнал имеет распределение, близкое к нормальному (gaus) в соответствие с очевидным правилом:
Name Sy≈Id*[min(ΔSyg; ΔSyl)],
где ΔSyg=abs(Sy-Sg)=abs(32-24,36)=7,64; ΔSyl=abs(Sy-Sl)=abs(24,36-15)=9,36. Отсюда следует, что: Name Sy≈Id*[min(7,64/gaus; 9,36/lapl)]=GAUS. Здесь символ Id*N обозначает операцию, обратную к операции Id[.] идентификации распределения по шкале.
Проведенными нами исследованиями установлены следующие фундаментальные свойства идентификационной шкалы (таблица 1):
1) шкала охватывает полный диапазон всех возможных существующих и мыслимых форм распределений;
2) значения отсчетов не зависят от параметров сдвига и масштаба анализируемых сигналов;
3) несмотря на ограниченное количество отсчетов (9), точность идентификации распределений можно повысить путем интерполяции значения идентификационного параметра (S) между соседними отсчетами.
Таким образом, ИТ можно интерпретировать как измерительный преобразователь со шкалой, подобной шкале обычного аналогового показывающего прибора, но дополненной категорийными (качественными) отметками.
Следовательно, ИТ является универсальным классификатором, который можно использовать для распознавания любых выборочных реализаций сигналов.
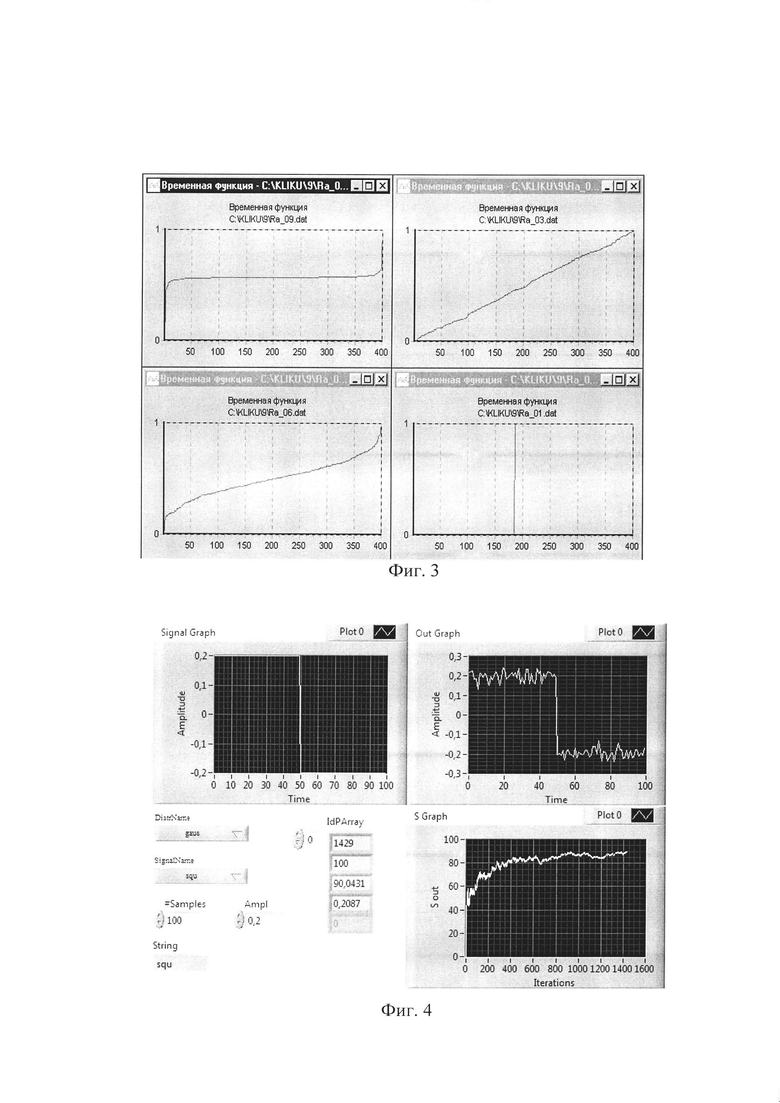
Принцип действия S-тестера основан на измерении крутизны ранжированной функции сигнала на центральном ее участке относительно медианы. На фиг. 3 представлены примеры ранжированных функций выборочных реализаций случайных сигналов с Коши, нормальным, равномерным и двумодальным распределениями. Видно, что средняя крутизна (Mean S) на центральном участке плавно увеличивается в направлении от Коши к двум-дальному распределению, что и служит основанием для «оцифровки» формы (имен) распределений.
Алгоритм вычисления идентификационного параметра S и его эволюция в системе заключается в следующем.
1) Выборочная реализация сигнала ранжируются по возрастанию.
2) Из ранжированной функции путем равномерной дискретизации выбирается 9 значений С(1), С(2), …, С(8), С(9) причем пятое по счету значение С(5) должно совпадать с медианой исследуемой выборки.
3) После этого вычисляется идентификационный параметр S по формуле (3).

где C(i) - i-oe значение ранжированной функции. При этом, если в сигнале преобладает шумовая компонента, то показания ИТ будут находиться в первой половине (в начале) шкалы.
4) С каждой итерацией накопления влияние шумовой компоненты будет падать, а регулярной компоненты - возрастать, что ведет к увеличению значения S.
5) При этом значение идентификационного параметра S будет стремиться к одному из распределений, соответствующих регулярной компоненте. Так, например, если зондирующий импульс имеет прямоугольную форму, то показания ИТ будут стремиться к S=100 (2mod распределение). Если же зондирующий импульс имеет треугольную форму, то показания ИТ будут стремиться к S=75 (even распределение, табл. 1).
6) Итерации накопления останавливаются, когда показания ИТ не достигнут некоторого заданного порогового уровня (S1).
Для проверки правильности функционирования заявляемых алгоритмов был разработан (в среде моделирования Lab VIEW) виртуальный прибор, структурная схема которого представлена на фиг. 4, 5 и 6 (формализованная блок-схема).
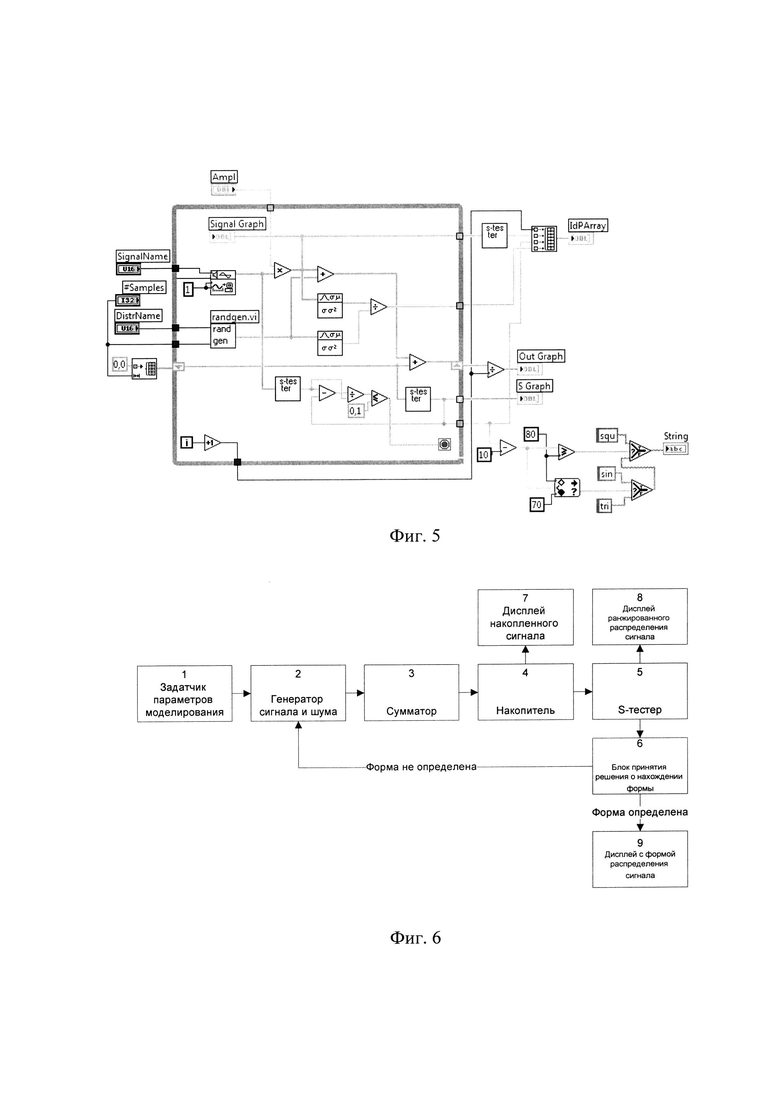
Панель управления (фиг. 4) виртуального прибора состоит из трех дисплеев, которые отображают график зондирующего сигнала (Signal Graph), график выходного сигнала (Out Graph) и зависимость текущего значения идентификационного параметра (S) от номера итерации. В качестве органов управления используются переключатель (DistrName) задания вида случайного сигнала (шума), переключатель (SignalName) задания формы зондирующего сигнала, задатчик (#Sample) числа отсчетов зондирующего сигнала, задатчик (Ampl) уровня зондирующего сигнала. Для отображения значений измеряемых параметров используется окно IdP Array. Суждение, идентифицирующее форму выходного сигнала, отображается в окне String. На фиг. 4 представлен пример работы системы, когда:
1) имеет прямоугольную форму (SignalName=squ);
2) задан белый шум с нормальным распределением (DistrName=gaus);
3) количество отсчетов зондирующего сигнала равно 100 (#Sample=100);
4) отношение сигнал/шум составляет 1:5, т.е. действующее значение шума в 5 раз больше действующего значения зондирующего сигнала.
При этом, были получены следующие оценки выходных параметров:
1) число итераций режима накопления = 1420 (1-я строка окна IdP Array);
2) идеальное значение зондирующего импульса = 100 (2-я строка окна IdP Array);
3) пороговое значение параметра формы выходного сигнала (зондирующий импульс + остаточный шум) = 90, 0431 (3-я строка окна IdP Array);
4) реальное отношение сигнал/шум = 0,2087 4-я строка окна IdP Array);
5) контрольное значение параметра формы зондирующего импульса = squ (окно String), совпадение которого со значением (SignalName = squ) зондирующего импульса, указывает на правильность и достоверность работы системы.
На фиг. 5 структуры программного кода системы показаны: основной, исполняемый модуль, модуль задающих параметров, модуль измеренных параметров и модуль принятия решений.
Исполняемый модуль выполнен в виде цикла типа For-Loop, внутри которого находятся: генератор зондирующего сигнала, генератор шума, сумматор сигналов, накопительный регистр, два идентификационных тестера S-типа, пороговое устройство и измеритель отношения сигнал/шум. Генератор зондирующего сигнала является многофункциональным и позволяет задавать 5 типов импульсных и периодических сигналов. Генератор шума позволяет задавать 14 типов (по распределению) случайных сигналов.
Модуль задающих параметров расположен слева от основного модуля и включает элементы управления моделью.
Модуль измеренных параметров расположен справа от основного модуля и включает идентификационный тестер S-типа, делительное устройство и устройство отображения выходных параметров IdP Array.
Модуль принятия решений расположен справа-снизу от основного модуля, состоит из 2-х компараторов и 2-х переключателей, с помощью которых реализуется функция логического вывода (выходное суждение).
Программный код системы работает в режиме «Заданная погрешность», при котором выходной информацией служит количество циклов накопления. Однако, программный код можно было легко адаптировать к режиму «Заданное число циклов накопления», при котором выходной информацией служит погрешность оценки формы зондирующего сигнала.
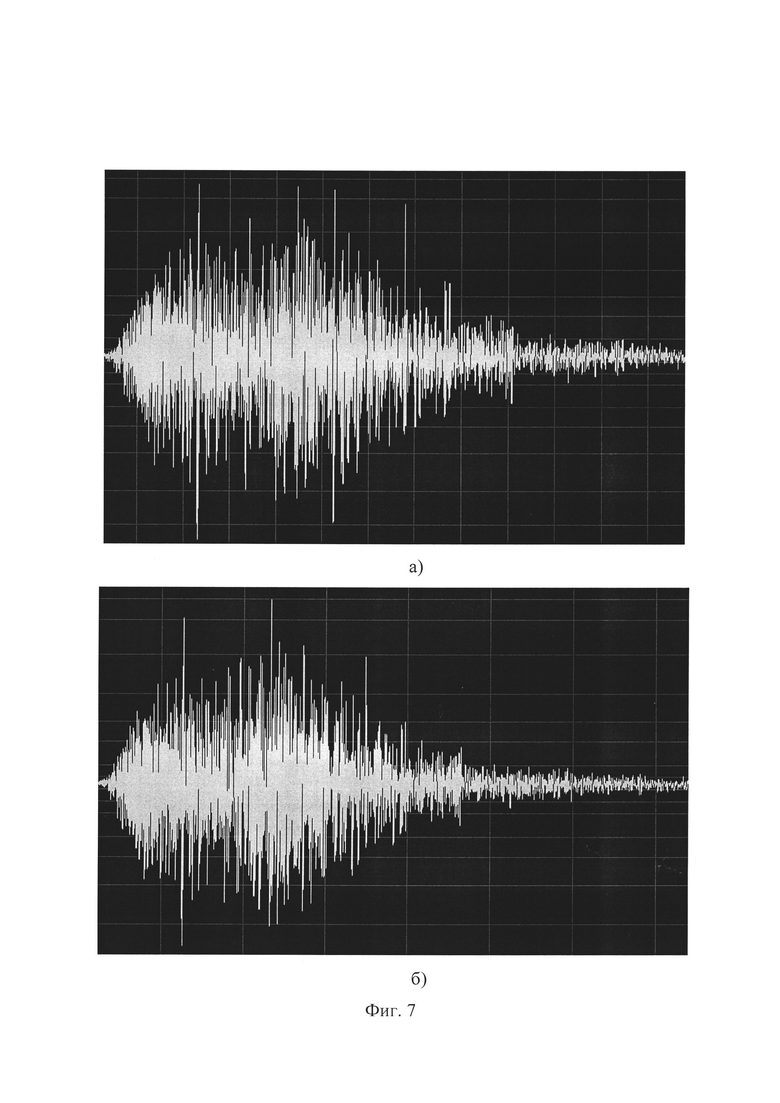
На фиг. 7 представлен пример импульсов, принятых с трубопровода. Ранжированные функции амплитуд для исправного состояния 7(a) и дефектного 7(б) различны, что приводит к возможности их классификации. Нормальное состояние трубопровода описывается распределением Лапласа (S≈20), а дефектное - распределением Гаусса (S≈28).
ЛИТЕРАТУРА
1. Пат. 2439551 Способ обнаружения дефектов в трубопроводах / Алексеев С.П. и др.
2. Пат. 2016135127 Способ обнаружения и классификации изменений параметров оболочки трубопровода и окружающей его среды / Епифанцев Б.Н., Комаров В.А., Нигрей Н.Н., Ищак Е.Р.
3. Энциклопедический словарь по радиоэлектронике, оптоэлектронике и гидроакустике / В.Г. Дождиков, Ю.С. Лифанов, М.И. Салтан; под ред. В.Г. Дождикова. - Изд. 3-е, перераб. и доп. - Москва: Энергия, 2008. - 611 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2585401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ИЗМЕНЕНИЙ ПАРАМЕТРОВ ОБОЛОЧКИ ТРУБОПРОВОДА И ОКРУЖАЮЩЕЙ ЕГО СРЕДЫ | 2016 |
|
RU2626583C1 |
| СПОСОБ РЕГИСТРАЦИИ И АНАЛИЗА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 2014 |
|
RU2570592C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ ИЗВЕСТНОЙ ФОРМЫ НА ОСНОВЕ ВЕКТОРНО-КОСИНУСНОЙ МЕРЫ ПОДОБИЯ | 2021 |
|
RU2783875C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ | 2016 |
|
RU2616568C1 |
| Устройство для исследования помехоустойчивости приемника видеосигналов | 1986 |
|
SU1386617A1 |
| СПОСОБ ОБРАБОТКИ ВЕКТОРНЫХ СИГНАЛОВ ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ НА ОСНОВЕ ВЕЙВЛЕТ-АНАЛИЗА | 2017 |
|
RU2690001C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| Способ определения параметров движения высокоскоростного воздушного объекта | 2023 |
|
RU2807316C1 |
Использование: для обнаружения и классификации сигнала в системах контроля. Сущность изобретения заключается в том, что обнаружение и классификация сигнала основаны на механизме обнаружения сигнала с использованием метода накопления и определения характеристик случайного сигнала, при этом сигнал после каждой итерации измеряется с помощью идентификационного тестера, получаемые оценки идентификационного параметра сравниваются с некоторым наперед заданным пороговым значением, при достижении которого итерации прекращаются. Технический результат: упрощение алгоритма работы и повышение точности классификации сигнала. 1 з.п. ф-лы, 7 ил., 1 табл.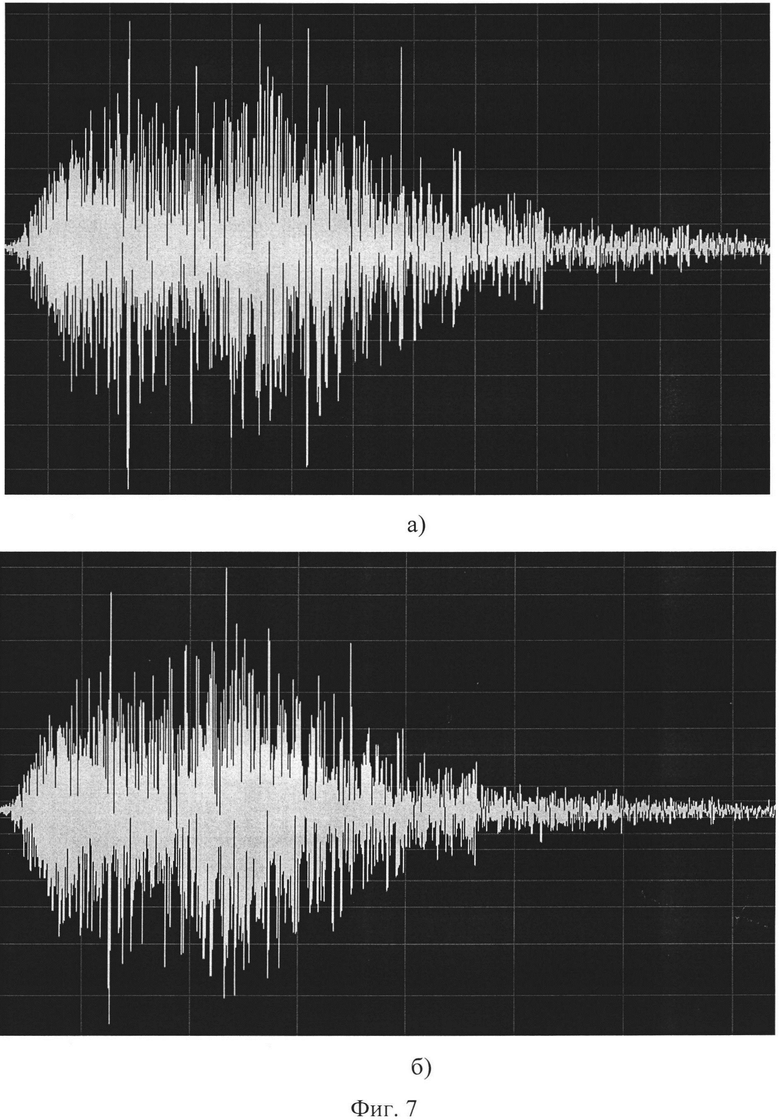
1. Способ обнаружения и классификации сигнала в системах контроля, основанный на механизме обнаружения сигнала с использованием метода накопления и определения характеристик случайного сигнала, отличающийся тем, что с целью упрощения алгоритма работы и повышения точности классификации сигнал, после каждой итерации, измеряется с помощью идентификационного тестера, получаемые оценки идентификационного параметра сравниваются с некоторым наперед заданным пороговым значением, при достижении которого итерации прекращаются.
2. Способ обнаружения и классификации сигнала в системах контроля, по п. 1, позволяющий распознать дефектное и бездефектное состояние объекта, отличающийся тем, что идентификационный тестер, выполненный в виде программного модуля, измеряет среднюю крутизну центрального участка ранжированной функции сигнала, которая логически связана с видом (формой) распределения.
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ИЗМЕНЕНИЙ ПАРАМЕТРОВ ОБОЛОЧКИ ТРУБОПРОВОДА И ОКРУЖАЮЩЕЙ ЕГО СРЕДЫ | 2016 |
|
RU2626583C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ МЕТАЛЛА ПОДЗЕМНОГО ТРУБОПРОВОДА | 2013 |
|
RU2536778C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| CN 102364501 A, 29.02.2012 | |||
| US 2006111852 A1, 25.05.2006. | |||

