Изобретение относится к механизации трудоемких процессов в животноводстве, в частности к устройствам для раздачи текучих кормов на свинофермах о
Цель изобретения - упрощение конструкции при одновременном расширении функциональных возможностей за смет увеличения количества шагов перемещения штанг без изменения расстояния между запорными элементами.
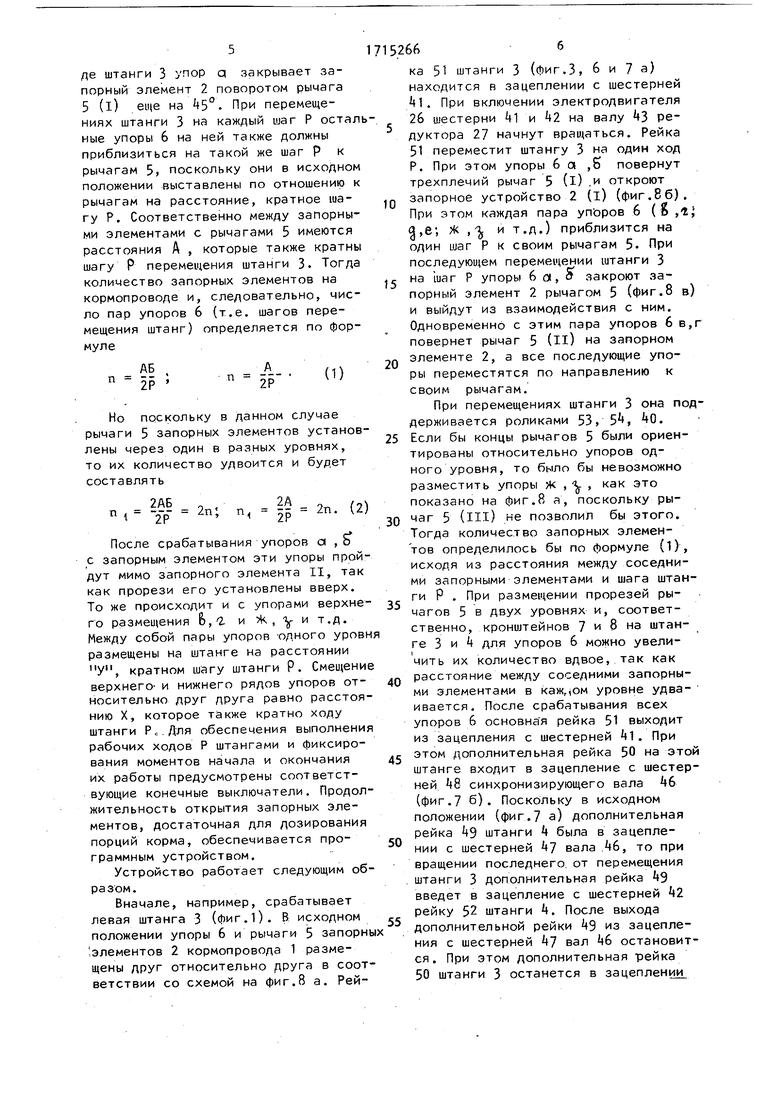
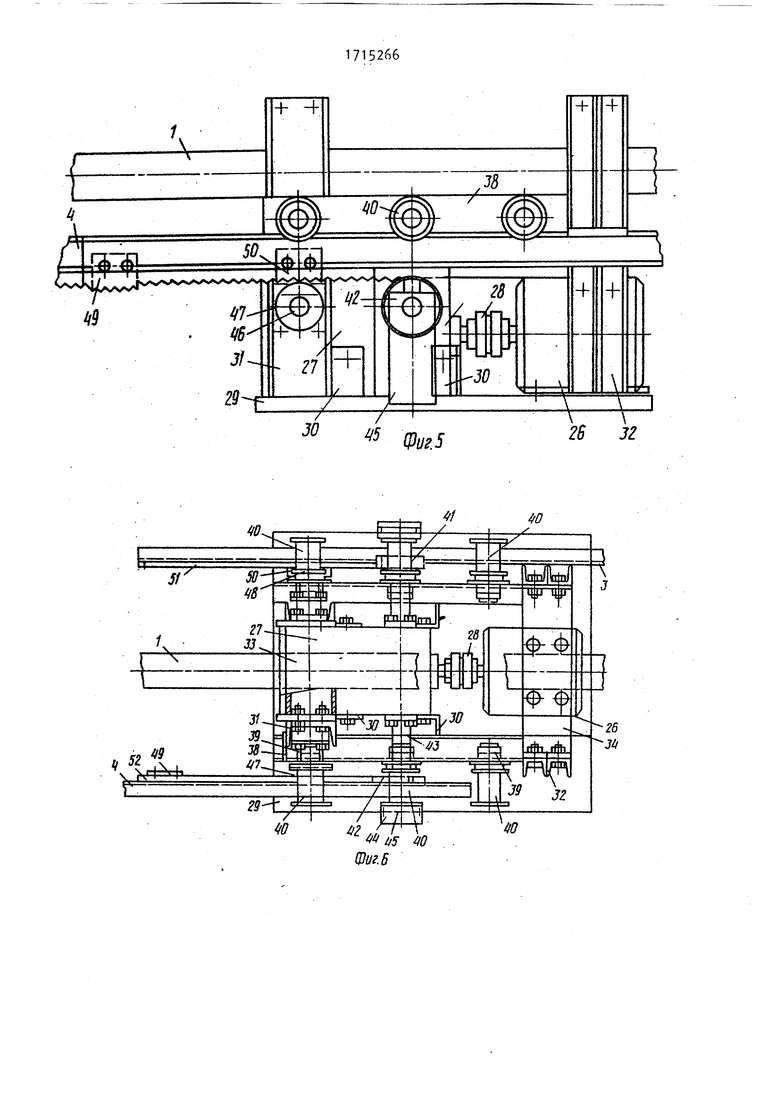
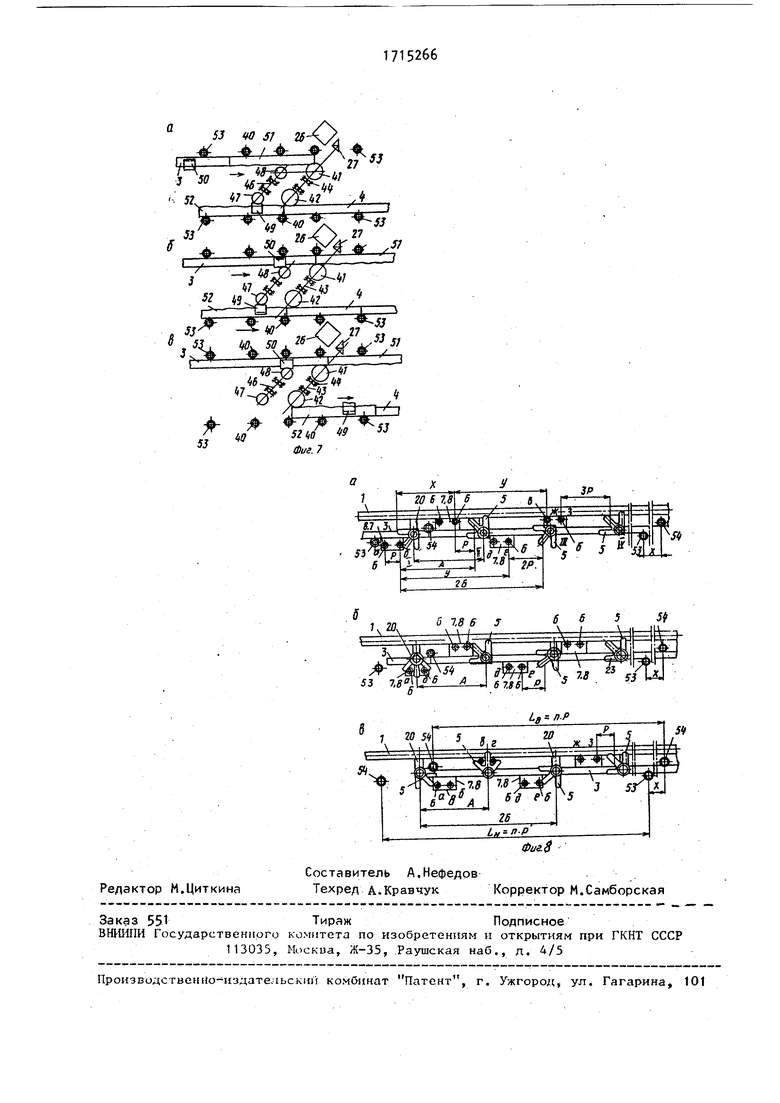
На фиг. 1 схематично изображено устройство для раздачи текучих кормов, общий вил; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - то же, вид с торца; на фиг, k - схема размещения устройства в свинарнике на фиг. 5 узел привода с механизмом переключения, вид сбоку на фиг.6 - то же, вид сверхуi на фиг. 7 кинематическая схема механизма переключения при различных положениях штанг на фиг о 8 - схема взаимодействия упоров с трехплечими рычагами при различных положениях штанг.
Устройство для раздачи текучих кормов содержит кормопровод 1 с запорными элементами 2 и штанги 3 и 4, связанные с узлом электропривода. На запорных элементах установлены двумя способами трехплечие рычаги 5 кверху и книзу своими прорезямиJ на фиг. 1 эти положения указаны буквами в и н. На штангах установлены также в верхнем и нижнем уровнях упоры 6, которые крепятся к кронштейнам 7 и 8 при помощи прокладок и крепежных элементов 9 и Ю. Кормопровод (фиг.) прикреплен к поперечи не 11 хомутом 12, причем поперечина опирается на стойки 13 и 1Й, которые в свою очередь, закреплены на плите 15, прикрепленной к перекладине 1б, связанной со стойками 17 через муфты 18. Стойки 17 являются перегородками станков, между которыми имеется проход для обслуживающего персонала. В станках предусмотрены кормушки 19. Запорные элементы присоединены к кор мопроводу через патрубки 20 с фланцами К каждому запорному элементу через фланцы 21 прикреплен отвод 22 в кормушку. Трехплечие рычаги 5 имеют плечи 23. Штанги 3 и опираются на имеющие реборды 2 ролики 25, которые прикреплены к стойкам 13 и . Узел электропривода состоит из электродвигателя 2б (фиг.З и 6), соединенного с редуктором 27 через муфту 28. Электродвигатель и редуктор установлены на плите 29 с помощью кроштейнов 30. Плита через стойки 31 и 32, поперечины 33 и 3, кронштейн 35 и хомут 36 прикреплена к кормопроводуо Стойки 31 и 32 соединены швеллерами 37 и пластинами 38. К последним гайками 39 прикреплены ролики 0. Они поднимают штанги к шестерням tl и 12 на ведущем валу редуктора 27. Опорные подшипники kk вала АЗ опираются на стойки 45. На стойках 31 установлен механизм переключения в виде синхронизирующего вала 46 с двумя шестернями 47 и . С этими шестернями взаимодействуют дополнительные зубчатые рейки 9 и 50 (фиг.6 и 7), которые прикреплены к штангам 3 и , на концах которых предусмотрены основные рейки 51 и 52 для перемещения их при взаимодействии с шестернями 1 и Ц2. Одна из основных реек постоянно находится в зацеплении с шестернями 1 или А2 (фиг.7). В исходном либо конечном положениях штанг 3 и А одна из дополнительных реек также находится в зацеплении с шестернями 47 или 8. Таким расположением основных и дополнительных реек обеспечивается переключение штанг 3. и if для поочередной работы. Для поддержки штанг 3 и предусмотрены опорные ролики 53, которые установлены с шагом, равным суммарному перемещению каждой из них. Поскольку плечи 23 трехплечих рычагов 5 взаимодействуют с упорами 6, установленными в двух разных уровнях, то и опорные РОЛИКИ размещены аналогичным образом. На фиг. 8 эти опорные ролики установлены на нижнем уровне, а аналогичные ролики k на верхнем уровне.
В исходном положении кронштейны 7 и 8 с парой упоров 6 (а, 5, Ь,7, фиг.8) расположены около опорных роликов 53 (I) и 5 (II). Упор находится в контакте с рычагом 5 (l Упор О находится от упора S на расстоянии Р , равном одному рабочему ходу штанги 3, т.е. проекции дуги, которую описывает рычаг 5 при повороте на 5 , при перемещении штанги 3 упор 6 должен открыть запорный элемент 2 при повороте рычага 5 (l) на . При последующем хо5де штанги 3 упор а закрывает запорный элемент 2 поворотом рычага 5 (l) еще на 5°- При перемещениях штанги 3 на каждый шаг Р остал ные упоры 6 на ней также должны приблизиться на такой же шаг Р к рычагам 5 поскольку они в исходном положении выставлены по отношению к рычагам на расстояние, кратное шагу Р. Соответственно между запорными элементами с рычагами 5 имеются расстояния А , которые также кратны шагу Р перемещения штанги 3. Тогда количество запорных элементов на кормопроводе и, следовательно, число пар упоров 6 (т.е. шагов перемещения штанг) определяется по формулеАБ А 2Р п 2р Но поскольку в данном случае рычаги 5 запорных элементов установ лены через один в разных уровнях, то их количество удвоится и будет составлять 2АБ „ , 2А , --- 2п; п Гр 2п. 12 2р - -ч 2Р После срабатывания упоров а ,о с запорным элементом эти упоры прой дут мимо запорного элемента II, так как прорези его установлены вверх. То же происходит и с упорами верхне го размещения ,1 и К..д. Между собой пары упоров -одного уров размещены на штанге на расстоянии У, кратном шагу штанги Р. Смещени верхнего и нижнего рядов упоров относительно друг друга равно расстоя нию X, которое также кратно ходу штанги PC.Для обеспечения выполнени рабочих ходов Р штангами и фиксирования моментов начала и окончания их работы предусмотрены соответствующие конечные выключатели. Продол жительность открытия запорных элементов, достаточная для дозирования порций корма, обеспечивается программным устройством. Устройство работает следующим об разом. Вначале, например, срабатывает левая штанга 3 (фиг.1). В исходном положении упоры 6 и рычаги 5 запорн элементов 2 кормопровода 1 размещены друг относительно друга в соот ветствии со схемой на фиг.8 а. Рей666ка 51 штанги 3 (фиг.З, 6 и 7 а) находится в зацеплении с шестерней 1. При включении электродвигателя 26 шестерни kl и 2 на валу 3 редуктора 27 начнут вращаться. Рейка 51 переместит штангу 3 на один ход Р. При этом упоры 6 а ,б повернут трехплечий рычаг 5 (l),и откроют запорное устройство 2 (l) (фиг.8 б). При этом каждая пара упоров 6 (8 ,1) ,6; ,}f и т.д.) приблизится на один шаг Р к своим рычагам 5. При последующем перемещении штанги 3 на шаг Р упоры 6 а, § закроют запорный элемент 2 рычагом 5 (фиг.8 в) и выйдут из взаимодействия с ним. Одновременно с этим пара упоров 6 в,г повернет рычаг 5 (И) на запорном элементе 2, а все последующие упоры переместятся по направлению к своим рычагам. При перемещениях штанги 3 она поддерживается роликами 53, З, 0. Если бы концы рычагов 5 были ориентированы относительно упоров одного уровня, то было бы невозможно разместить упоры Ж , -v , как это показано на фиг.8 а, поскольку рычаг 5 (ill) не позволил бы этого. Тогда количество запорных элементов определилось бы по формуле (1), исходя из расстояния между соседними запорными элементами и шага штанги Р . При размещении прорезей рычагов 5 в двух уровнях и, соответственно, кронштейнов 7 и 8 на штанге 3 и для упоров 6 можно увеличить их количество вдвое, так как расстояние между соседними запорными элементами в каждом уровне удваивается. После срабатывания всех упоров 6 основная рейка 51 выходит из зацепления с шестерней k . При этом дополнительная рейка 50 на этой штанге входит в зацепление с шестерней 8 синхронизирующего вала 46 (фиг.7 б). Поскольку в исходном положении (фиг.7 а) дополнительная рейка 9 штанги 4 была в зацеплении с шестерней 7 вала Л6, то при вращении последнего, от перемещения штанги 3 дополнительная рейка 9 введет в зацепление с шестерней k2 рейку 52 штанги k. После выхода дополнительной рейки 4Э из зацепления с шестерней 47 вал 46 остановится. При этом дополнительная рейка 50 штанги 3 останется в зацеплении
с шестерней ЦЪ. При перемещениях штанги М от взаимодействия упоров 6 с рычагами 5 на запорных элементах 2 они будут поочередно открываться и закрываться. После завершения перемещения штанги Ц рейка 52 останется в зацеплении с шестерней 42 (фиг.7 э) и при реверсе узла электропривода работа штанг 3 и + повторится в обратном направлении в рабочем или холостом режимах.
изобретения
Формула
Устройство для раздачи текучих кормов, содержащее кормопровод, выгрузные патрубки которого снабжены запорными элементами, имеющими трехплечие рычаги, установленные с возможностью взаимодействия с попарно закрепленными на штангах упорами, расположенными на расстоянии друг от друга, не совпадающем с расстояними между запорными элементами
на величину, кратную шагу перемещения штанг, и прикрепленные к смежным концам последних основные зубчатые рейки, поочередно взаимодействующие с механизмом переключения узла привода, отличающееся тем, что, с целью упрощения конструкции при одновременном расширении функциональных возможностей за счет увеличения количества шагов перемещения штанг без изменения расстояния между запорными элементами, упоры на каждой штанге закреплены относительно запорных элементов на соответственно верхнем и нижнем уровнях и смещены относительно друг друга на величину, кратную шагу перемещения штанг, при этом механизм переключения выполнен в виде вала с шестернями, установленными с возможностью поочередного взаимодействия с присоединенными к штангам дополнительными зубчатыми рейками и подвода к узлу привода основных реек.
/ / /
31 30 28 , 31
&
(PU2.J t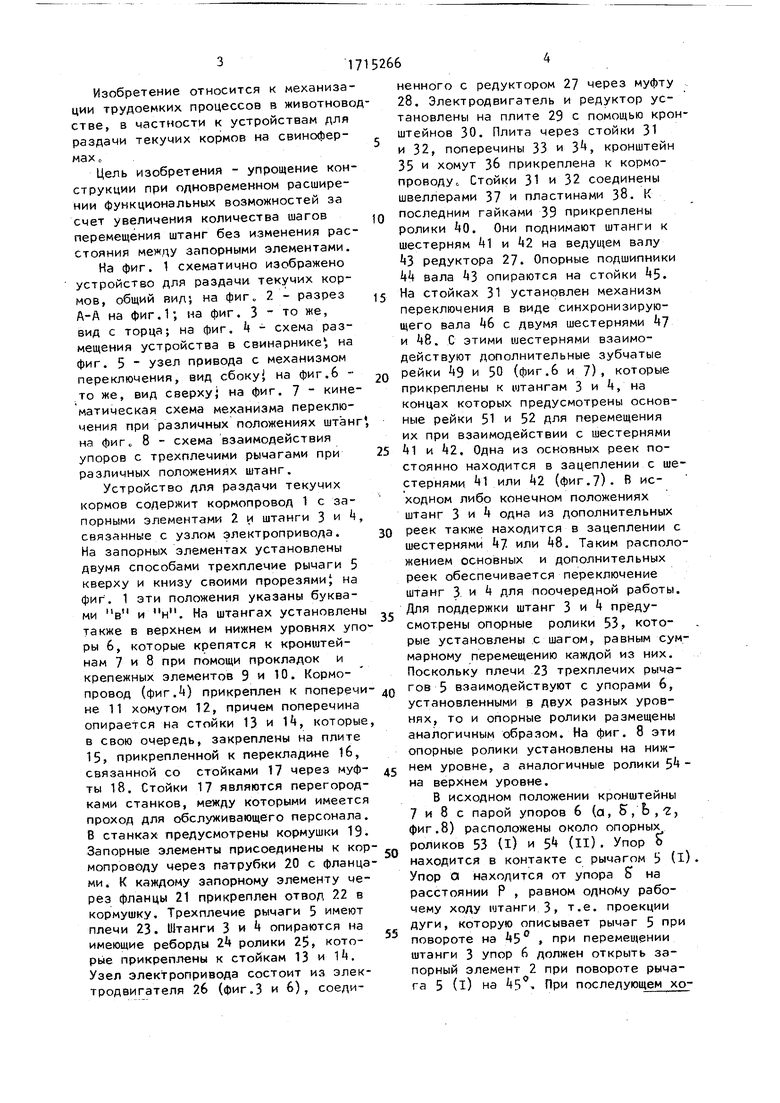
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи текучих кормов | 1988 |
|
SU1576084A1 |
| Кормораздатчик | 1986 |
|
SU1387931A1 |
| Устройство для выдачи влажных кормовых смесей | 1983 |
|
SU1123604A1 |
| Устройство для раздачи текучих кормов | 1991 |
|
SU1836903A1 |
| Устройство для раздачи концентрированных кормов при привязном содержании животных | 1990 |
|
SU1794422A1 |
| Устройство для раздачи жидких кормов | 1983 |
|
SU1107811A2 |
| Устройство для раздачи кормов | 1981 |
|
SU1087124A1 |
| Роторная машина для обработки ленточного материала | 1989 |
|
SU1666250A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ ТЕСТА | 2006 |
|
RU2311781C1 |
| Устройство для раздачи кормов | 1979 |
|
SU816450A2 |
Изобретение относится к механизации трудоемких процессов в животноводстве и обеспечивает упрощение конструкции при одновременном расширении функциональных возможностей за счёт увеличения количества шагов перемещения штанг без изменения расстояния между запорными элементами. Устройство для раздачи текучих кормов содержит кормопровод 1, выгру'зные патрубки которого снабжены запорными элементами 2, имеющими трехплечие рычаги 5» управляемые от попарных упоров 6 штанг 3 и 4. Упоры расположены на двух разных уровнях на расстоянии друг от друга, не совпадающем с расстояниями между запорными элементами на величину/ кратную шагу перемещения штанг. Переключение последних осуществляется механизмом, выполненным в виде синхронизирующего вала с шестернями на его концах, взаимодействующими с дополнительными рейками, закрепленными на штангах, благодаря чему при поочередном взаимодействии ш'естерен с дополнительными рейками к узлу привода поочередно подводятся основные рейки. 8 ил.Л-АФигг/5
ФигЛ И5 W
| Устройство для выдачи влажных кормовых смесей | 1983 |
|
SU1123604A1 |
| , | |||
