Изобретение относится к ткацкому производству, а именно к конструкциям ковроткацких станков.
Цель изобретения - повышение надежности в работе при навивке основы.
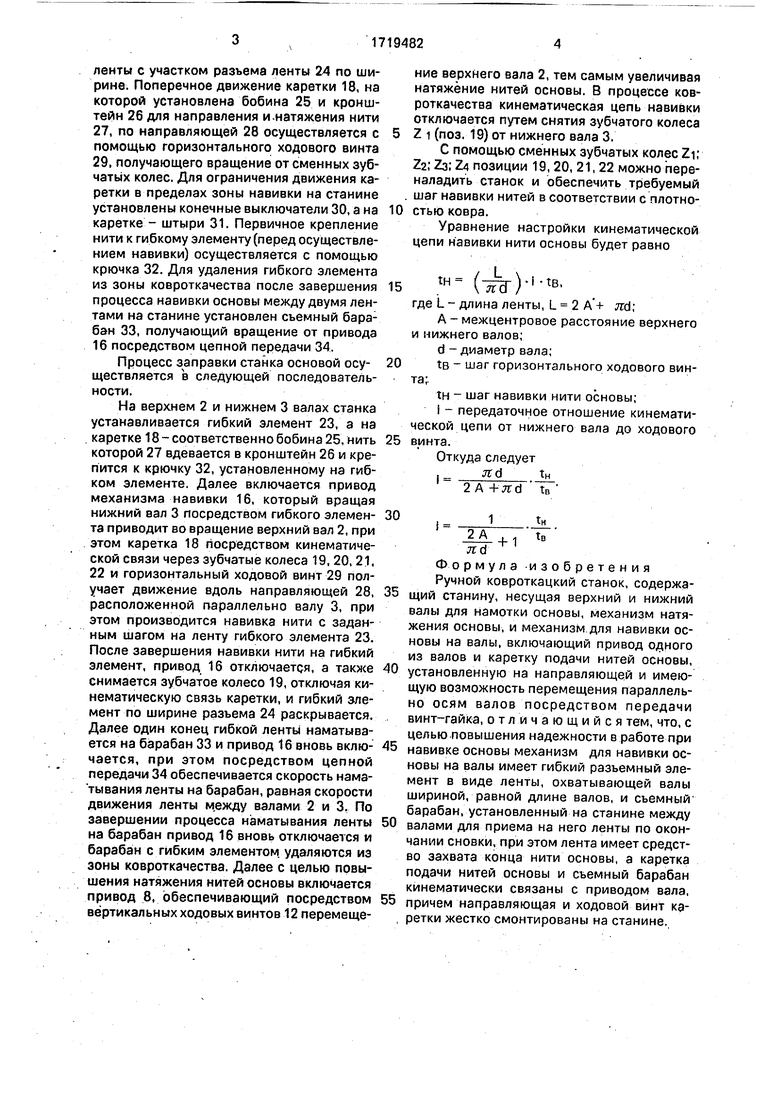
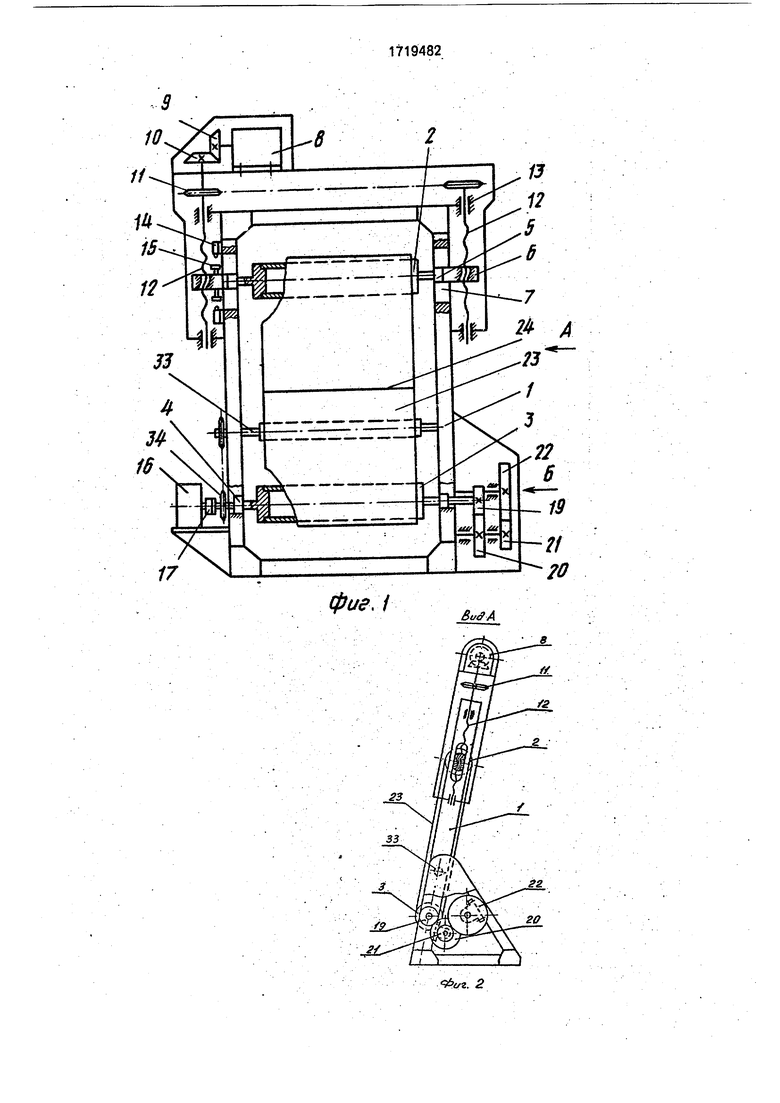
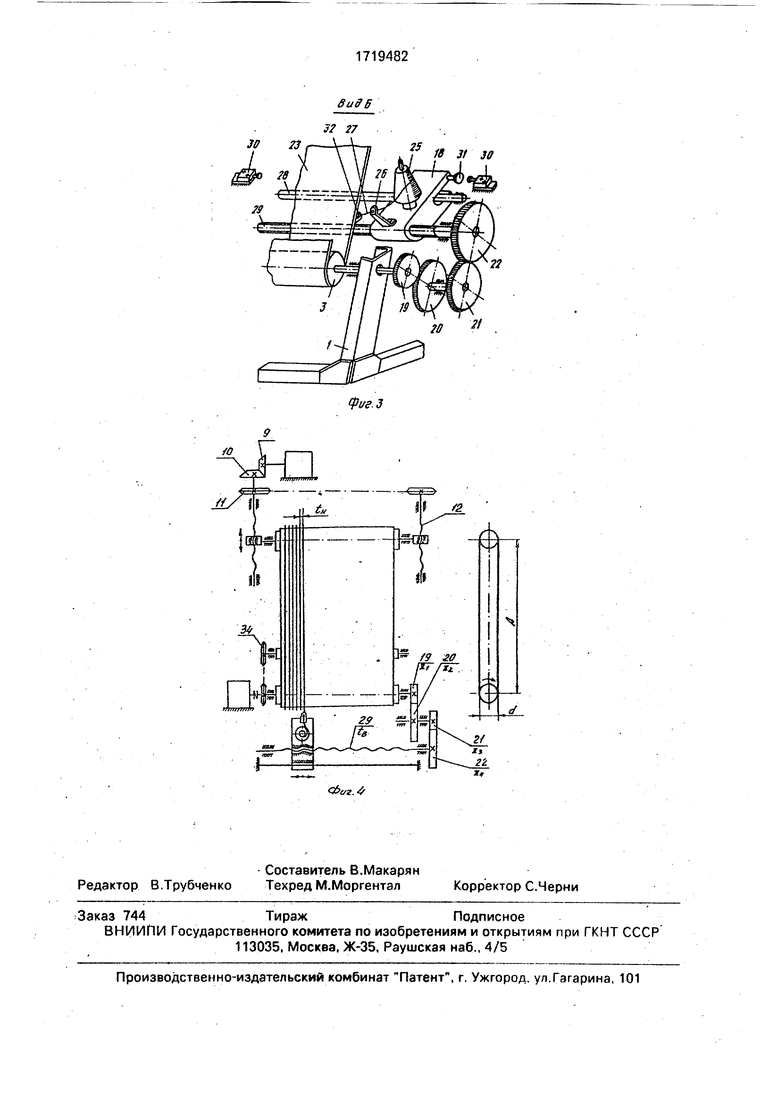
На фиг. 1, 2 показан общий вид ручного ковроткацкого станка; на фиг. 3 - процесс навивки основы на гибкий элемент, установленный на валах; на фиг. 4 - кинематика. станка.
Станок состоит из корпуса 1, верхнего 2 и нижнего 3 валов, соответственно взаимодействующих с механизмом натяжения основы и механизмом ее навивки,, при этом нижний вал посредством подшипников 4 расположен в корпусе, а верхний с подшипниками 5 установлен в держателях б, обеспечивающих возможность его вертикального
перемещения в пазу 7 под действием механизма натяжения основы. Механизм натяжения основы состоит из привода 8, соединенного посредством конических зубчатых колес 9, 10 и цепной передачи 11 с вертикальными ходовыми винтами 12, закрепленными с двух сторон станины в подшипниковых узлах 13. Для ограничения перемещения вала 2 на корпусе станины установлены конечные выключатели 14, а на держателях 6 - штыри 15.
Механизм навивки основы состоит из привода 16, соединенного муфтой 17с нижним валом 3 и кинематической связи данного вала с кареткой 18, осуществляемой сменными зубчатыми колесами 19, 20, 21. 22. На нижнем и верхнем валах установлен гибкий элемент 23, выполненный в виде
ю
Јз
ГО
nzrtujb
ленты с участком разъема ленты 24 по ширине. Поперечное движение каретки 18, на которой установлена бобина 25 и кронштейн 26 для направления и.натяжения нити 27, по направляющей 28 осуществляется с помощью горизонтального ходового винта 29, получающего вращение от сменных зубчатых колес. Для ограничения движения каретки в пределах зоны навивки на станине установлены конечные выключатели 30, а на каретке - штыри 31. Первичное крепление нити к гибкому элементу (перед осуществлением навивки) осуществляется с помощью крючка 32. Для удаления гибкого элемента из зоны ковроткачества после завершения процесса навивки основы между двумя лентами на станине установлен съемный барабан 33, получающий вращение от привода 16 посредством цепной передачи 34.
Процесс заправки станка основой осу- ществляется в следующей последовательности.
На верхнем 2 и нижнем 3 валах станка устанавливается гибкий элемент 23, а на каретке 18 - соответственно бобина 25, нить которой 27 вдевается в кронштейн 26 и крепится к крючку 32, установленному на гибком элементе. Далее включается привод механизма навивки 16, который вращая нижний вал 3 посредством гибкого элемен- та приводит во вращение верхний вал 2, при этом каретка 18 посредством кинематической связи через зубчатые колеса 19, 20,21, 22 и горизонтальный ходовой винт 29 получает движение вдоль направляющей 28, расположенной параллельно валу 3, при этом производится навивка нити с заданным шагом на ленту гибкого элемента 23. После завершения навивки нити на гибкий элемент, привод 16 отключается, а также снимается зубчатое колесо 19, отключая кинематическую связь каретки, и гибкий элемент по ширине разъема 24 раскрывается. Далее один конец гибкой ленты наматывается на барабан 33 и привод 16 вновь вклю- чается, при этом посредством цепной передачи 34 обеспечивается скорость нама- тывания ленты на барабан, равная скорости движения ленты между валами 2 и 3. По завершении процесса наматывания ленты на барабан привод 16 вновь отключается и барабан с гибким элементом удаляются из зоны ковроткачества. Далее с целью повышения натяжения нитей основы включается привод 8, обеспечивающий посредством вертикальных ходовых винтов 12 перемещение верхнего вала 2, тем самым увеличивая натяжение нитей основы. В процессе ковроткачества кинематическая цепь навивки отключается путем снятия зубчатого колеса Z 1 (поз. 19) от нижнего вала 3.
С помощью сменных зубчатых колес ZK Т-г Za; ТА позиции 19,20, 21,22 можно переналадить станок и обеспечить требуемый шаг навивки нитей в соответствии с плотностью ковра.
Уравнение настройки кинематической цепи навивки нити основы будет равно
tH
(w)
tB,
где L-длина ленты, L 2 А + rd;
А- межцентровое расстояние верхнего и нижнего валов;
d - диаметр вала;
tB - шаг горизонтального ходового винта;.
tH шаг навивки нити основы;
I - передаточное отношение кинематической цепи от нижнего вала до ходового винта.
Откуда следует
,Jtd tH
2 А +лб tB
1
2 А Ли
+ 1
Формула изобретения Ручной ковроткацкий станок, содержащий станину, несущая верхний и нижний валы для Намотки основы, механизм натяжения основы, и механизм для навивки основы на валы, включающий привод одного из валов и каретку подачи нитей основы, установленную на направляющей и имеющую возможность перемещения параллельно осям валов посредством передачи винт-гайка, отличающийся тем, что, с целью повышения надежности в работе при навивке основы механизм для навивки основы на валы имеет гибкий разъемный элемент в виде ленты, охватывающей валы шириной/равной длине валов, и съемный барабан, установленный на станине между валами для приема на него ленты по окончании сновки, при этом лента имеет средство захвата конца нити основы, а каретка подачи нитей основы и съемный барабан кинематически связаны с приводом вала, причем направляющая и ходовой винт каретки жестко смонтированы на станине.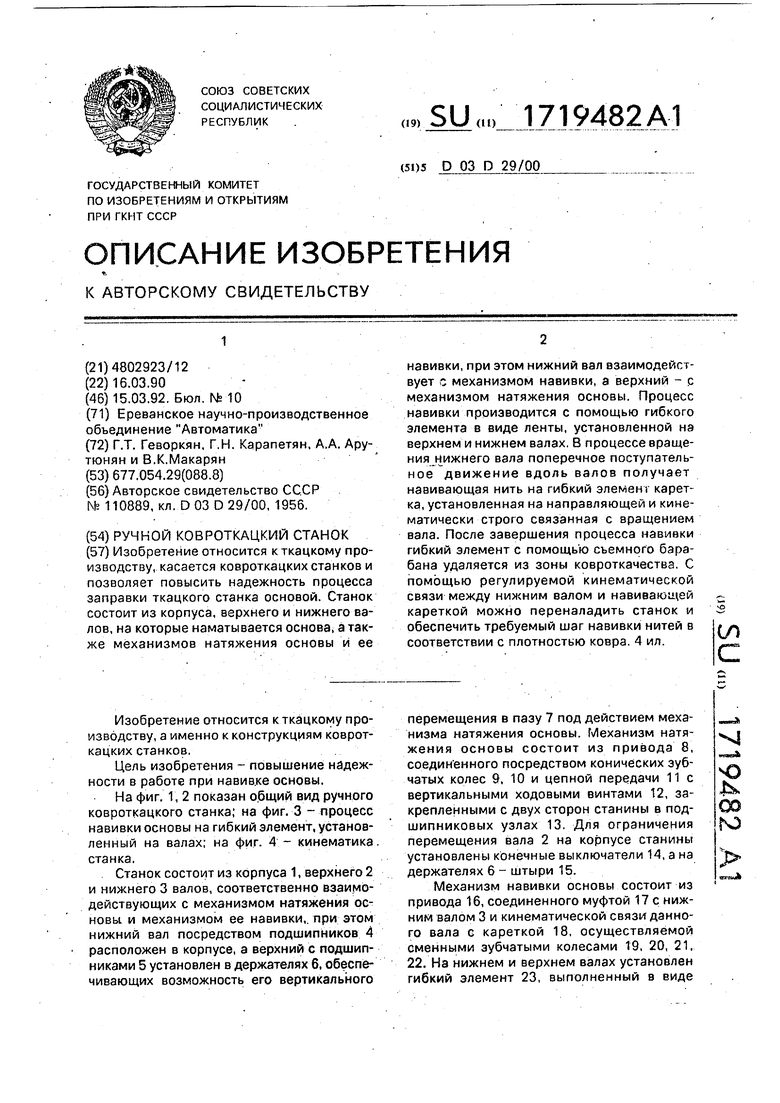
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной ковроткацкий станок | 1990 |
|
SU1758101A1 |
| РУЧНОЙ КОВРОТКАЦКИЙ СТАНОК | 1991 |
|
RU2057826C1 |
| Ручной ковроткацкий станок | 1991 |
|
SU1817793A3 |
| Устройство для сновки основы ковра, вырабатываемого на ручном ковроткацком станке | 1960 |
|
SU139620A1 |
| Ручной ковроткацкий станок | 1987 |
|
SU1505995A1 |
| Ручной ковроткацкий станок | 1989 |
|
SU1657551A1 |
| Ручной ковроткацкий станок | 1986 |
|
SU1375698A1 |
| Ручной ковроткацкий станок с вертикальным расположением основы | 1956 |
|
SU110889A1 |
| Устройство для образования коврового узла на ковровоткацком станке | 1979 |
|
SU785389A1 |
| Ткацкий станок для ручного изготовления ковров | 1987 |
|
SU1476007A1 |
Изобретение относится к ткацкому производству, касается ковроткацких станков и позволяет повысить надежность процесса заправки ткацкого станка основой. Станок состоит из корпуса, верхнего и нижнего валов, на которые наматывается основа, а также механизмов натяжения основы и ее навивки, при этом нижний вал взаимодействует с механизмом навивки, а верхний - с механизмом натяжения основы. Процесс навивки производится с помощью гибкого элемента в виде ленты, установленной на верхнем и нижнем валах. В процессе вращения нижнего вала поперечное поступательное движение вдоль валов получает навивающая нить на гибкий элемент каретка, установленная на направляющей и кинематически строго связанная с вращением вала. После завершения процесса навивки гибкий элемент с помощью съемного барабана удаляется из зоны ковроткачества. С помощью регулируемой кинематической связи между нижним валом и навивающей кареткой можно переналадить станок и обеспечить требуемый шаг навивки нитей в соответствии с плотностью ковра. 4 ил. (Л С
фие.1
ВидА
Фиг. 2
f8 3t 30
21
| Ручной ковроткацкий станок с вертикальным расположением основы | 1956 |
|
SU110889A1 |
