Изобретение относится к измерительной технике и приборостроению.
. Известен способ преобразования перемещения, основанный на преобразовании перемещения в периодически меняющийся оптический сигнал с последующим преобразованием его в электрический сигнал и подсчетом числа периодов изменения сигнала и определением величины перемещения по количеству периодов изменения сигнала от минимального до максимального и значению сигнала внутри периода его изменения.
Недостатком этого способа является то, что необходимо иметь два оптических сигнала, сдвинутых на половину периода друг относительно друга для определения направления перемещения, что усложняет
применение его в случае ограниченных объемов.
Известен также способ преобразования физической величины в изменение емкости датчика с последующим преобразованием ее в периодический электрический сигнал в функции относительного перемещения электродов датчика, при котором перемещение определяется путем измерения количества периодов изменения электрического сигнала и величины сигнала внутри периода.
Недостатком этого способа является неполная информативность ввиду отсутствия сигнала о скорости перемещения электродов, что не позволяет экстррполировать выходной сигнал о возможном положении
О 00 Ю
Ю
электродов на время преобразования сигналов,
Цель изобретения - повышение информативности выходного сигнала.
Это достигается тем, что в способе преобразования сигнала емкостного датчика физического параметра с многосекционными электродами с переменной площадью их перекрытия, заключающемся в том, что емкость между электродами датчика преобразуют в периодический электрический сигнал функции относительно перемещения его электродов, определяют общее количество периодов изменения этого сигнала и амплитуду сигнала внутри последнего периода его изменения, по которому определяют величину и направление изменения физического параметра, дополнительно сообщают возвратно-поступательное перемещение с частотой, меньшей частоты питания датчика, и амплитудой, меньшей ширины секции электродов в направлении изменения площади перекрытия его электродов, в крайних положениях подвижного электрода, связанных с возвратно-поступательным перемещением, измеряют амплитуды электрического сигнала емкостного датчика, сравнивают их по величине, по результату сравнения определяют направление изменения периодического сигнала, не связанного с возвратно-поступательным движением, а по величине этого результата - скорость изменения.
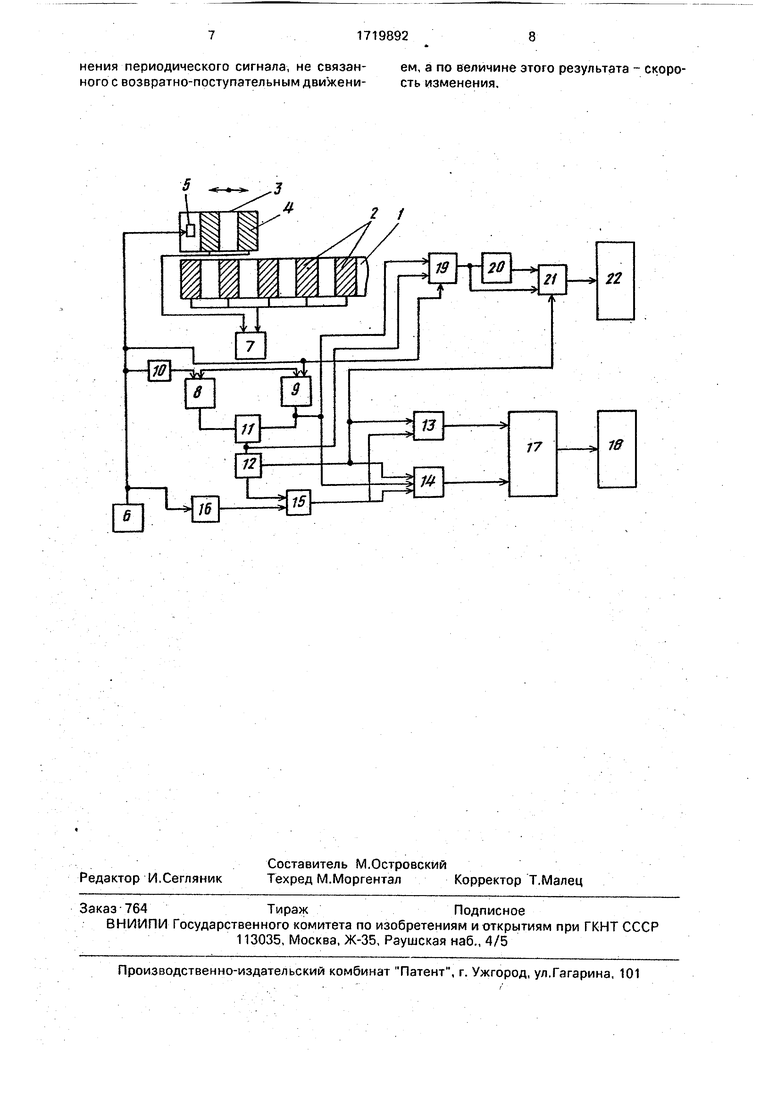
На чертеже представлена функциональная схема для осуществления данного способа.
Устройство для преобразования сигнала емкостного датчика физического параметра содержит чувствительный элемент, состоящий из статора 1 с обкладкой 2, выполненной в виде полос, расположенных на одинаковом расстоянии друг от друга и перпендикулярно к измеряемому перемещению, и ротора 3 с обкладкой 4, выполненной аналогичным образом. На роторе размещен вибратор 5, подключенный к генератору 6 переменного напряжения. Обкладки статора 1 и ротора 3 подключены ко входу линейного преобразователя емкости 7, выход которого подключен к одним входам запоминающих устройств 8 и 9, другие входы последних подсоединены соответственно через инвертор 10 и непосредственно к генератору переменного напряжения 6. Выходы запоминающих устройств 8 и 9 подсоединены к входам первого блока разности 11, а его выход соединен с компаратором 12Г Од ин выход компаратора непосредственно соединен с первыми входами элемента 13 ИСКЛЮЧАЮЩЕЕ ИЛИ и логического блока 14, а другой выход компаратора 12 через запоминающее устройство 15 - со вторыми их входами. При этом другай вход запоминающего устройства 15 через элемент задержки 16 подключен к генератору 6, а выходы элемента 13 ИСКЛЮЧАЮЩЕЕ ИЛИ и .логического блока 14 подключены соответственно ко входу, уп0 равляющему направлением счета, реверсивного счетчика 17с индикатором грубого отсчета 18 и к счетному входу этого счетчика, Выход запоминающего устройства 9 подключен ко входам первого логического
5 блока 14 и второго логического блока 19, управляемого также сигналом с выхода первого блока разности 11 и генератора 6. Выход логического блока 19 подсоединен через второй блок разности 20 и ключ 21,
0 управляющий вход которого соединен с выходом компаратора 12, к индикатору точного отсчета 22.
Способ преобразования сигнала емкостного датчика физического параметра за5 ключается в следующем. Ротор 3 совершает поступательное перемещение и одновременно возвратно-поступательное движение, задаваемое вибратором 5, с постоянной амплитудой, величина которой
0 меньше расстояния между полосками статора и ротора, но больше порога чувствительности преобразователя 7, и периодом, меньшим времени перемещения ротора при его поступательном движении на эту вели5 чину, а время нахождения ротора в крайних положениях больше времени измерения преобразователя 7,
В зависимости от положения ротора относительно статора меняется сигнал на вы0 ходе линейного преобразователя емкости 7. Выходные сигналы этого преобразователя, соответствующие крайнему правому и крайнему левому- положению ротора при воз- BpaTHO-nocTynatenbHOM его движении,
5 запоминаются в запоминающих устройствах 8 и 9 соответственно. После каждого импульса генератора 6 на выходе блока разности 11 появляется сигнал, равный разности сигналов с запоминающих устройств 8 и
0 9. Далее в блоке 12 определяется знак этой разности напряжений, и если сигнал запоминающего устройства 8 больше сигнала запоминающего устройства 9, на выходе блока 12 формируется сигнал 1, а если
5 наоборот, на выходе блока 12 - О. Через интервал времени, равный половине периода колебаний интегратор 6, формируемый блоком 16, запоминающее устройство 15 запомнит этот сигнал, В следующий период колебаний генератора 6 на выходах компаратора 12 сформируются новые значения сигнала, соответствующие новому положению ротора. В случае, если ротор остался на прежнем месте, значение выходного сигнала на выходе компаратора 12 равно прежнему значению, и, следовательно, на входах элемента 13 ИСКЛЮЧАЮЩЕЕ ИЛИ будут присутствовать одинаковые сигналы с блоков 12 и 15, что вызывает на выходе элемента 13 логический ноль, и реверсивный счетчик 17 не изменит своего состояния. Если же ротор переместится вправо или назад на величину, большую расстояния между полосами статора и ротора, на входах элемента 13 присутствуют различные сигналы и счетчик 17 получает сигнал на изменение выходного кода. Знак этого изменения определяется сигналом с блока 14. Блок 14 работает по следующему алгоритму
fUl5 +1
yUi2 0 знак изменения кода +
Ыэ иМакс/2
TUi5 Q
Ш12 1 знак изменения кода -
lUg имакс/12
Ш12 О знак изменения кода + LUg имвкс/2
Ш12 0 знак изменения кода -
ймакс/2
гтде Ug-сигнал на выходе запоминающего устройства 9;
Ui2 - сигнал снимаемый с компаратора 12;
Uis - сигнал снимаемый с запоминающего устройства 15;- -f
Умакс - сигнал на блоке 9 при взаимном расположении ротора и статора таким образом, что емкость между ними максимальна.
Выходной код счетчика 17 отображает на индикаторе грубого отсчета 18 положение ротора относительно статора, выраженное в целых частях полупериодов, равных расстоянию между его полосами. Одновременно определяется положение ротора относительно статора внутри полупериода.
Сигналы с запоминающего устройства 9 и блока разности 11 поступают в логический блок 19, работающий по следующему алго ритму ..
Ug + Un-Дэт если Un О
+ 2
Un -A Т
эт
Ug + Un+ Аэт-2 если U11 0,
Un +Д Т
где Дэт - сигнал, полученный с выхода блока 11 при отсутствии поступательного перемещения ротора относительно статора;
Uig - сигнал на выходе блока 19; Т - период колебаний генератора 6;
t - текущее время, прошедшее после появления последнего импульса генератора 6.
0 При этом величина, равная разности между абсолютным значением сигнала с блока определения разности 11 и сигналом с этого же блока, полученном при отсутствии поступательного движения ротора отно5 сительно статора несет информацию о величине и направлении скорости перемещения ротора относительно статора и используется для коррекции показаний точного отсчета. Блок 20 определяет раз0 ность между сигналом в левом положении ротора при взаимном расположении ротора и статора таким образом, что их емкость максимальна, и текущем сигналом при левом положении ротора. Сигналы с блока 19
5 и 20 коммутируются ключом .21, управляемым компаратором 12 и поступают на индикатор точного отсчета 22.
Формула изобретения
Способ преобразования сигнала емкостного датчика физического параметра с многосекцион.ными электродами с переменной площадью их перекрытия, заключающийся в том, что емкость между
электродами датчика преобразуют в периодический электрический сигнал в .функции относительного перемещения его электродов, определяют общее количество перио40 дов изменения этого сигнала и амплитуду сигнала внутри последнего периода его изменения, по которым определяют величину и направление изменения физического параметра, отличающийся тем, что, с
45 целью повышения информативности путем измерения также и скорости изменения этого параметра, дополнительно сообщают подвижному электроду емкостного датчика возвратно-поступательное перемещение
50 с частотой, меньшей частоты питания датчика, и амплитудой, меньшей ширины секции электрода в направлении изменения площади перекрытия его электродов, в крайних положениях подвижного электро55 да, связанных с возвратно-поступательным перемещением, измеряют амплитуды электрического сигнала емкостного датчика, сравнивают их по величине, по результату сравнения определяют направление изменения периодического сигнала, не связан- ем, а по величине этого результата - скоро- ного с возвратно-поступательным движени- сть изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик угла поворота | 1984 |
|
SU1205237A1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2005 |
|
RU2289789C1 |
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ ЭНЕРГИИ | 2016 |
|
RU2718672C2 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| Устройство для измерения линейного перемещения | 1981 |
|
SU1113662A1 |
| Вентильный электродвигатель | 1985 |
|
SU1464260A1 |
| Измеритель угловых перемещений | 1988 |
|
SU1603187A1 |
| Электромагнитное устройство для измерения перемещений | 1987 |
|
SU1483246A1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
Изобретение относится к контрольно- измерительной технике и приборостроению. Способ определения перемещений основан на преобразовании величины перемещения в периодический электрический сигнал посредством емкостного датчика перемещений с последующим подсчетом количества периодов и определением положения внутри периода, при котором одной из обкладок датчика сообщают возвратно-поступательное перемещение заданной частоты и амплитуды. Затем в крайних положениях подвижной обкладки измеряют амплитуды преобразованного электрического сигнала и по их значениям определяют направление перемещения, уточняют положение внутри периода и скорость перемещения. 1 ил. сл
| Домрачев В | |||
| Г., Матвеевский В | |||
| Р | |||
| и Смирнов Ю | |||
| С | |||
| Схемотехника цифровых преобразователей перемещений | |||
| М.: Энер- гоатомиздат, 1987 | |||
| стр | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Дж | |||
| Вульвет Датчики в цифровых системах | |||
| М.: Энергоатомиздат, 1981, стр | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
