Настоящее изобретение относится к электромеханическим линейным исполнительным механизмам, в частности к электромеханическому приводу, и может быть использовано для перемещения отсечного золотника в системе управления турбоагрегата, важной для безопасности атомной электростанции.
Одним из средств обеспечения безопасности атомной электростанции является привод отсечного золотника турбоагрегата, позволяющий за несколько десятков миллисекунд переместить отсечной золотник на несколько десятков миллиметров и тем самым быстро изменить расход рабочей среды. В таком приводе должны одновременно быть обеспечены повышенные надежность работы, точность и скорость отработки положения исполнительного органа привода, взаимодействующего с отсечным золотником. При этом привод должен иметь компактную конструкцию.
Известно использование электромеханических приводов для преобразования вращательного движения в линейное перемещение и управления машинами и механизмами, соединенными с ними. В частности, из RU 2213896 (13.04.1999) известен электромеханический привод для трубопроводной арматуры, содержащий электродвигатель с полым ротором, в котором размещены резьбовая втулка и винтовой шпиндель, соединенный с запорным органом. Привод заключен в неподвижный корпус. В полом роторе электродвигателя между резьбовой втулкой и винтовым шпинделем размещена гайка, выполненная в виде трех цилиндрических резьбовых роликов, расположенных в сепараторах. Резьбовая втулка и стакан, закрепленный неподвижно в полом роторе, имеют шлицевые канавки, обеспечивающие возможность их линейного перемещения относительно друг друга.
Известный привод имеет небольшие габариты и достаточную надежность для работы с обычной трубопроводной арматурой, обеспечиваемые за счет того, что резьбовая втулка, резьбовые ролики, охватываемые ею, и винтовой шпиндель, перемещаемый вращаемыми вокруг него роликами, образуют роликово-винтовую передачу, в которой нагрузка передается через резьбовую поверхность всех роликов, что обеспечивает максимальную площадь контакта.
Основным недостатком известного привода является относительно большой момент инерции вращающейся части привода. Из физики известно, что момент инерции механической системы относительно неподвижной оси равен сумме произведений масс всех материальных точек системы на квадраты их расстояний до оси. В известном приводе относительно большой момент инерции вращающейся части обусловлен непосредственной связью ротора с резьбовой втулкой, приводящей к необходимости использования стакана, соединяющего ротор с резьбовой втулкой, и необходимости выбора толщин стенок ротора и резьбовой втулки с учетом их соединения со стаканом (например шлицевого и/или шпоночного), превышающих толщины, обусловленные их функциональным назначением (например прочностью, магнитным насыщением и т.п.). Иными словами, непосредственная кинематическая связь ротора с резьбовой втулкой приводит к необходимости введения конструктивной связи, реализуемой через дополнительную массу, заключенную между ротором и резьбовой втулкой.
Таким образом, большой момент инерции вращающейся части в известном приводе не позволяет обеспечить требуемую скорость отработки положения исполнительного органа электромеханического привода без больших энергетических затрат.
Кроме того, конструкция известного привода не отвечает требованиям резервирования предъявляемых к системе управления турбоагрегата атомной электростанции для обеспечения требуемой надежности и безопасности работы.
Также в известном приводе отсутствует возможность определения положения его исполнительного органа (винтового шпинделя).
Задачей предлагаемого изобретения является устранение указанных недостатков, в особенности обеспечение требуемой для безопасности атомной электростанции скорости и точности отработки положения исполнительного органа привода при минимальных энергетических затратах в системе управления турбоагрегата.
Указанная задача решена использованием линейного электромеханического привода, содержащего электродвигатель, статор которого охватывает полый ротор. Кроме того, предлагаемый привод содержит выходной шток и ролики, снабженные внешней резьбой и размещенные в полости ротора в резьбовой втулке по окружности так, что их оси параллельны оси ротора. От известного электропривода предлагаемый привод отличается тем, что внутри ротора соосно размещен винт, имеющий внешнюю резьбу, взаимодействующую с резьбой роликов, которая также взаимодействует с внутренней резьбой указанной втулки, жестко связанной с одним концом выходного штока, установленного с удержанием от поворота, причем с одним концом винта жестко связан ротор, а другой конец винта размещен в полости выходного штока.
В предлагаемом приводе винт, взаимодействующий через резьбу роликов с невращающейся резьбовой втулкой, имеет относительно небольшой диаметр, а ротор выполнен максимально легким, поэтому вращающаяся часть привода имеет относительно небольшой момент инерции, что позволяет обеспечить требуемую скорость отработки положения исполнительного органа электромеханического привода без больших энергетических затрат.
Удержание выходного штока от поворота предпочтительно обеспечивается противоротационным устройством, содержащим коромысло, жестко закрепленное на выходном штоке, и колеса, два из которых установлены на подпружиненных рычагах, выходящих из коромысла, по существу, перпендикулярно продольной оси выходного штока.
Ротор предлагаемого электромеханического привода предпочтительно установлен в подшипниковом узле с возможностью преднатяжения для устранения осевых люфтов.
Взаимодействие внешней резьбы винта с внутренней резьбой втулки, осуществляемое через внешнюю резьбу роликов, предпочтительно является безлюфтовым.
В предпочтительном варианте реализации изобретения ролики в количестве девяти штук размещены в сепараторах, установленных в резьбовой втулке, а выходной шток имеет гладкую поверхность.
Для погашения кинетической энергии движущихся частей предлагаемого электромеханического привода при достижении выходным штоком крайних положений его ход предпочтительно ограничен упругими элементами, такими как тарельчатые, пружины или резиновые демпферы.
Ротор электродвигателя в электромеханическом приводе может вращаться как по часовой стрелке, так и против нее, вызывая перемещение выходного штока как в одном направлении, например, для закрытия отсечного золотника, так и в противоположном направлении, соответственно, для открытия золотника.
Для обеспечения надежности работы электромеханического привода на роторе его электродвигателя соосно друг за другом закреплены по меньшей мере два комплекта полюсных магнитов, охватываемых соответственно по меньшей мере двумя комплектами полюсных катушек статора, размещенных соосно друг за другом. Таким образом, в предлагаемом электромеханическом приводе обеспечено резервное дублирование силовой электрической части. Кроме того, с целью резервного дублирования сдвоенными выполнены электрические разъемы, катушка управления тормозом и датчик обратной связи.
Датчик обратной связи позволяет с требуемой точностью определять текущее положение выходного штока с подачей соответствующего сигнала. При получении приводом сигнала на изменение рабочего положения отсечного золотника в двигателе срабатывает одна пара статор-ротор, при отказе которой возможно включение в работу другой пары статор-ротор.
Кроме того, в предлагаемом электромеханическом приводе обеспечены отсутствие механических люфтов, высокая точность перемещения выходного штока, взаимодействующего с отсечным золотником, и защита выходного штока от загрязнения.
Предлагаемый электромеханический привод обладает высокими эксплуатационными качествами и позволяет при минимальных энергетических затратах с высокой надежностью и скоростью управлять положением отсечного золотника турбоагрегата атомной электростанции.
На фиг.1 схематично показан разрез предлагаемого электромеханического привода.
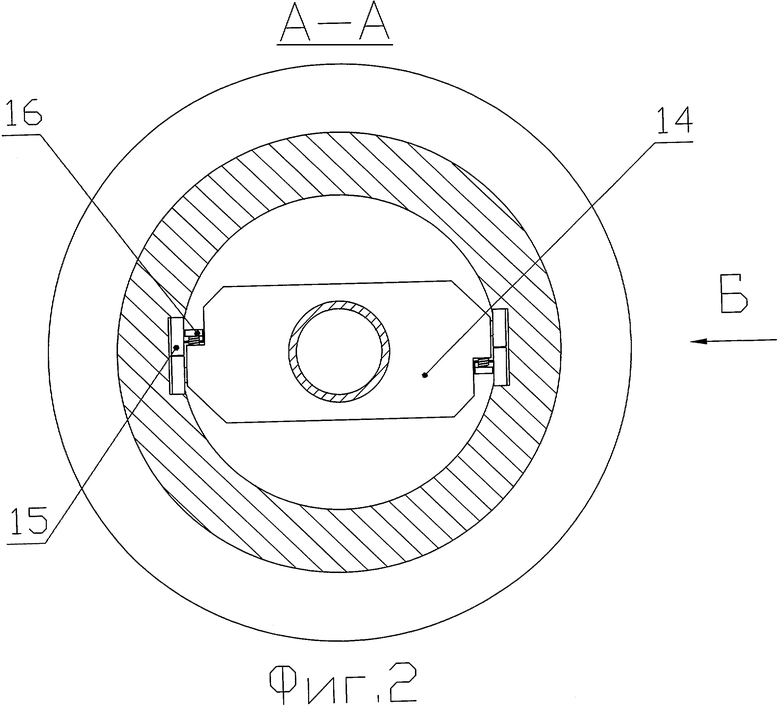
На фиг.2 схематично показан разрез предлагаемого электромеханического привода, выполненный по линии А-А на фиг.1.
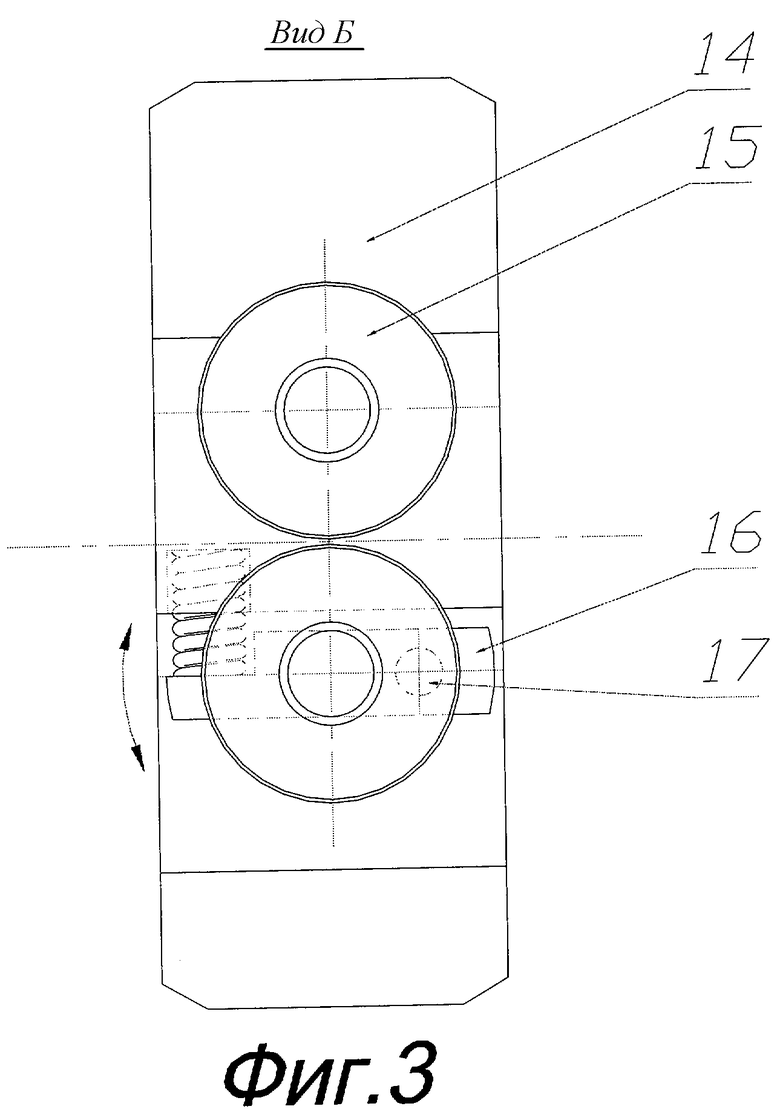
На фиг.3 схематично показана конструкция подпружиненных рычагов коромысла предлагаемого электромеханического привода. Изображено по виду Б на фиг.2.
Как показано на фиг.1, электромеханический привод содержит электродвигатель 1, статор 2 которого охватывает полый ротор 3 и девять роликов 4, снабженных внешней резьбой и размещенных в полости ротора 3 в сепараторах 5 по окружности так, что их оси параллельны оси ротора 3.
Ротор 3 жестко связан с винтом 6, соосно закрепленным внутри него и имеющим внешнюю резьбу, взаимодействующую с резьбой роликов 4. Резьба роликов 4 также взаимодействует с внутренней резьбой втулки 7, размещенной в полости ротора 3, охватывающей ролики 4 и жестко связанной со стаканом 8. Стакан 8 размещен на конце выходного штока 9, с которым он выполнен предпочтительно за одно целое. Таким образом, втулка 7 жестко связана с внутренним концом выходного штока. Внешний резьбовой конец 10 выходного 5 штока 9, являющегося исполнительным органом электромеханического привода, соединен с запорным органом, в данном примере с отсечным золотником.
Жесткая связь винта 6 с ротором 3 реализована жестким закреплением одного конца винта 6 в ступице 11 ротора 3, которая размещена с одного конца ротора 3 и, в свою очередь, посажена на спаренные радиально упорные подшипники подшипникового узла 12, обеспечивающие безлюфтовое вращение ротора 3. Другой конец ротора 3 посажен на радиально упорные подшипники подшипникового узла 23. На роторе 3 закреплены два набора полюсных магнитов 13, размещенных соосно друг за другом и охватываемых соответственно комплектами полюсных катушек статора, размещенных соосно друг за другом.
Выходной шток 9 удерживается от поворота вокруг своей продольной оси противоротационным устройством, содержащим коромысло 14, которое надето на выходной шток 9, по существу, перпендикулярно ему и жестко закреплено. На двух концах коромысла 14 установлено по паре колес 15 (фиг.2), оси которых, по существу, перпендикулярны продольной оси выходного штока 9. Ось одного колеса 15 одной указанной пары и ось одного колеса 15 другой указанной пары, расположенного на противоположном конце коромысла 14 диаметрально противоположно относительно продольной оси Штока 9, выполнены неподвижными. Другие два противоположных колеса 15 выполнены подпружиненными, поскольку установлены на подпружиненных рычагах 16 (фиг.3), выполненных с возможностью углового перемещения вокруг своих осей 17, причем ось вращения подпружиненного колеса и ось вращения рычага разнесены на несколько миллиметров. Устранение углового люфта коромысла 14 происходит за счет выборки зазора между колесами 15 и внутренней поверхностью направляющих продольных пазов цилиндра 18 (фиг.1).
Электромеханический привод также содержит тормозное устройство 19, имеющее две управляющие катушки 20 и два датчика 21 обратной связи, закрепленные на цилиндрической части винта 6, закрытые снаружи колпаком 22. Корпус электромеханического привода в сборе образован колпаком 22, тормозным устройством 19, подшипниковым узлом 12, двигателем 1, подшипниковым узлом 23, цилиндром 18 и монтажным фланцем 24, которые стянуты шпильками 25. Ограничение хода выходного штока 9 при достижении им крайних положений осуществляется тарельчатыми пружинами 26.
При работе привода вращение полого ротора 3 электродвигателя 1 вызывает вращение винта 6, внешняя резьба которого взаимодействует с резьбой охватывающих его роликов 4 и вызывает их вращение вокруг своих осей. Резьба роликов 4 взаимодействует также с внутренней резьбой втулки 7. Вращение роликов 4 приводит к линейному перемещению втулки 7, жестко связанной с выходным штоком 9 через стакан 8 и приводящий запорный орган в поступательное движение. В зависимости от направления вращения ротора происходит закрытие или открытие отсечного золотника (не показан).
Поскольку диаметр винта 6 относительно мал, а ротор 3 выполнен максимально легким, вращающаяся часть привода имеет небольшой момент инерции и обеспечивает требуемую скорость отработки положения исполнительного органа электромеханического привода без больших энергетических затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| Электромеханический привод | 2018 |
|
RU2722890C2 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД C ВОЗМОЖНОСТЬЮ СМАЗЫВАНИЯ БЕЗ ДЕМОНТАЖА | 2019 |
|
RU2719493C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1998 |
|
RU2159485C2 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| ПОГРУЖНОЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2549381C1 |
| Линейный электропривод | 2019 |
|
RU2735979C1 |
Изобретение относится к электромеханическим линейным исполнительным механизмам, в частности к электромеханическим приводам, и предназначено для перемещения отсечного золотника в системе управления турбоагрегата. Электромеханический привод содержит электродвигатель, статор, ролики, выходной шток. Статор охватывает полый ротор. Ролики снабжены внешней резьбой и размещены в полости ротора в резьбовой втулке по окружности. Оси роликов параллельны оси ротора. Внутри ротора соосно размещен винт. Винт имеет внешнюю резьбу. Резьба винта взаимодействует с резьбой роликов. Резьба роликов взаимодействует с внутренней резьбой втулки. Втулка жестко связана с одним концом выходного штока. Шток установлен с удержанием от поворота. Один конец винта жестко связан с ротором. Другой конец винта размещен в полости выходного штока. Изобретение направлено на повышение надежности электромеханического привода. 8 з.п. ф-лы, 3 ил.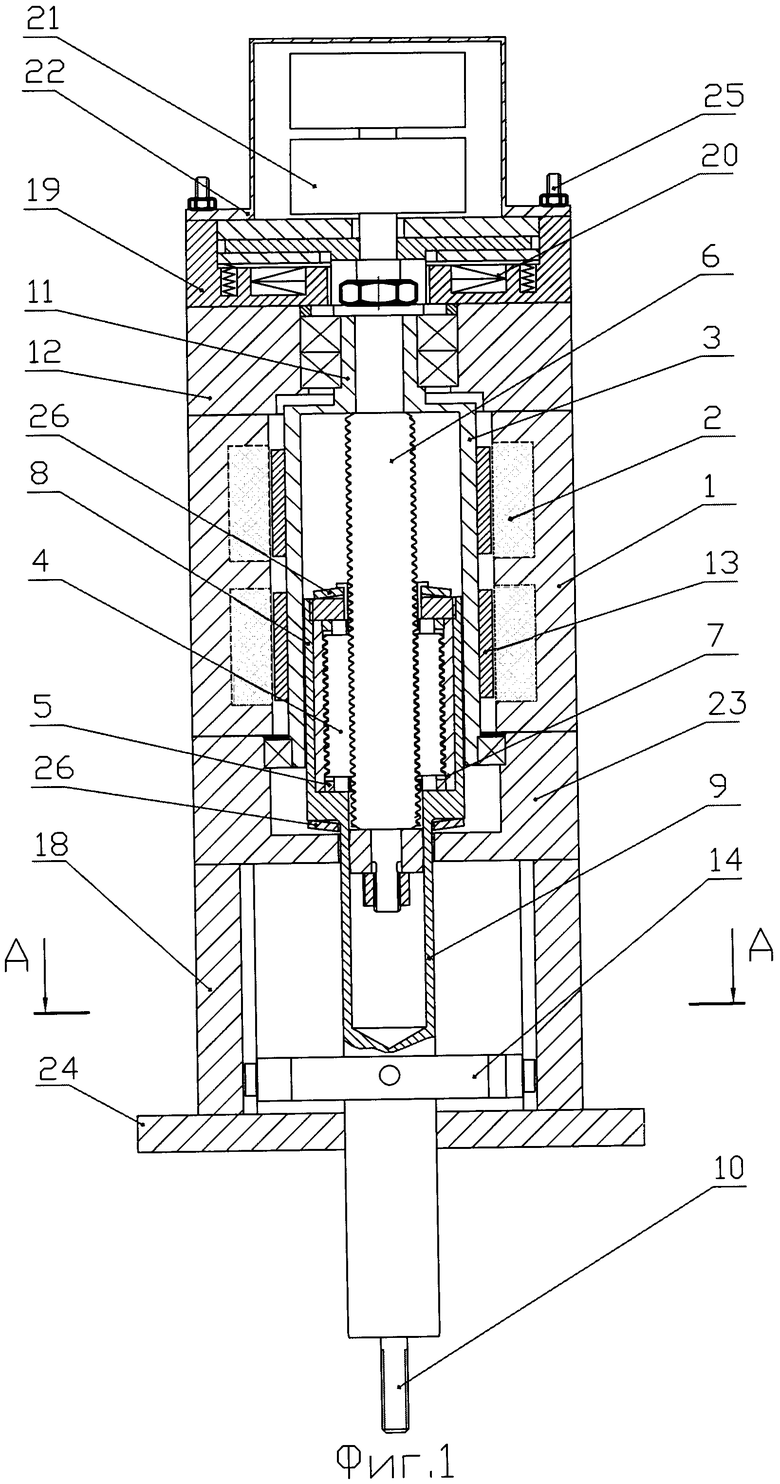
1. Электромеханический привод, содержащий электродвигатель, статор которого охватывает полый ротор, ролики, снабженные внешней резьбой и размещенные в полости ротора в резьбовой втулке по окружности так, что их оси параллельны оси ротора, и выходной шток, отличающийся тем, что внутри ротора соосно размещен винт, имеющий внешнюю резьбу, взаимодействующую с резьбой роликов, которая также взаимодействует с внутренней резьбой указанной втулки, жестко связанной с одним концом выходного штока, установленного с удержанием от поворота, причем с одним концом винта жестко связан ротор, а другой конец винта размещен в полости выходного штока.
2. Электромеханический привод по п.1, в котором выходной шток удерживается от поворота вокруг своей продольной оси противоротационным устройством.
3. Электромеханический привод по п.1, в котором ротор установлен в подшипниковом узле с возможностью преднатяжения для устранения осевых люфтов.
4. Электромеханический привод по п.1, в котором взаимодействие внешней резьбы винта с внутренней резьбой втулки, осуществляемое через внешнюю резьбу роликов, является безлюфтовым.
5. Электромеханический привод по п.1, в котором роликов девять.
6. Электромеханический привод по п.1, в котором ролики размещены в сепараторах, установленных в резьбовой втулке.
7. Электромеханический привод по п.1, в котором выходной шток имеет гладкую поверхность.
8. Электромеханический привод по п.1, в котором ход выходного штока ограничен упругими элементами, такими как тарельчатые пружины или резиновые демпферы.
9. Электромеханический привод по п.1, в котором на роторе соосно друг за другом закреплены, по меньшей мере, два комплекта полюсных магнитов, охватываемых соответственно, по меньшей мере, двумя комплектами полюсных катушек статора, размещенных соосно друг за другом.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 1999 |
|
RU2213896C2 |
| Узел управления трубопроводной арматурой | 1988 |
|
SU1645711A1 |
| Электропривод | 1984 |
|
SU1613769A1 |
| Электропривод | 1986 |
|
SU1765587A2 |
| DE 3615285 A1, 19.03.1987 | |||
| Этикетоотборник машины для мойки бутылок | 1978 |
|
SU785188A1 |

