Изобретение относится к электротехнике и может быть использовано при управлении преобразователями на базе автономных инверторов напряжения, входящими в состав систем частотно-регулируемого электропривода переменного тока.
Известны алгоритмы широтно-импульс- ного управления трехфазными инверторами
напряжения, при которых суммарная продолжительность включающих вентили импульсов составляет 120 или 150 эл.град.
Однако форма кривой выходного напряжения преобразователя при этом в значительной степени зависит от параметров нагрузки, что затрудняет эффективное использование упомянутых алгоритмов при
питании резкопеременных нагрузок двигательного типа.
Известен также инвариантный к параметрам нагрузки способ управления автономными трехфазными инверторами напряжения с несимметричным 180-градусным управлением, при котором суммарная продолжительность включающих сигналов управления, поступающих на каждый из шести вентилей трехфазной одномостовой схемы инвертора в течение периода выходной частоты, составляет 180 эл. град, при этом для каждого основного вентиля в течение одного полупериода от 0 до 180 эл.град, создают интервал проводимо- сти, в течении другого полупериода - от 180 до 360 эл.град. - создают интервал закрытого состояния, тактовые интервалы проводимости от 60 до 120 эл.град. и закрытого состояния от 240 до 360 эл.град.разби- вают на целое число отрезков равной длительности, в правой краней части каждого из которых формируют соответственно основные сигналы запирания и включения вентилей (3). При этом в процессе связанно- го регулирования частоты и величины выходного напряжения инвертора количество указанных основных сигналов поэтапно уменьшается с ростом выходной частоты вплоть до полного исчезновения указанных сигналов на номинальной выходной частоте преобразователя. В случае N-кратного диапазона связанного регулирования частоты и среднего на полупериоде значения выходного напряжения на начальной (минималь- ной) выходной частоте преобразователя Fo количество указанных сигналов управления внутри тактовых интервалов равно N, а их продолжительность определяется как
1 N -1
ЛО о-
6F0N2
Однако в спектре подобных форм выходного напряжения на всем диапазоне регулирования присутствуют значительные по амплитуде паразитные гармонические со- ставляющие.
К числу недостатков способа управления относится также то, что переход от одного поддиапазона регулирования к другому, сопровождаемый изменением количе- ства импульсов в полуволне выходной кривой инвертора, производится скачкообразно, за счет резкого дискретного изменения длительности выходных импульсов и их временного положения. Это сопровождает- ся заметными скачками в величинах действующего значения выходного напряжения преобразователя и амплитуд гармоник его спектра и негативно сказывается на ходе
электромагнитных процессов в преобразователе и нагрузке.
Целью изобретения является улучшение гармонического состава выходного напряжения преобразователя в процессе плавного безударного перехода от одного поддиапазона регулирования к другому.
Поставленная цель достигается тем, что при управлении по указанному способу, обеспечивающему N-кратное связанное регулирование частоты и величины выходного напряжения преобразователя, при котором вентили разных фазтрехфазного мостового преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл.град., для каждого вентиля в течение одного полупериода от 0 до 180 эл.град. формируют зону проводимости, в течение другого полупериода от 180 до 360 эл.град. формируют зону закрытого состояния, внутри тактовых интервалов проводимости от 60 до 120 эл.град. и тактовых интервалов закрытого состояния вентилей от 240 до 300 эл.град. формируютсоответственно сигналы выключения и включения вентилей (сигналы управления), количество которых последовательно уменьшается с ростом выходной частоты преобразователя, причем на начальной выходной частоте F0 тактовые интервалы разбивают на .N подинтервалов с
длительностью, равной та „ r k, ,в край0 го N
ней правой части каждого из которых на всем диапазоне регулирования формируют сигналы управления с начальной продолжи- N -1
тельностьюЛо
тот Fo Л 2
, в диапазоне час- 6F0N2
Fo продолжительность
тактовых подинтервалов т поддерживают постоянной и равной ть,начало каждого первого и конец каждого последнего тактового подинтервала синхронизируют с началом и концом соответствующего тактового интервала, формирование каждого 1-го по направлению от конца к середине тактового интервала сигнала управления (каждого (М)-го от начала тактового интервала сигнала) осуществляют при изменении выходной частоты преобразователя от F0 2(1 -1 )N
) (21-3)4-1 п Ричем при изменении выходной частоты от F0 до 2 (I - 1 ) N
до Fi Fo
Fi Fo
внутри
2 (I -1 )(2i -1 )- 1 каждого тактового подинтервала формируют сигнал управления с длительностью
6(2|1-1)-() приП р -F|
Я -
внутри (1-1)- и правых и (1-2) - и левых от середины полупериода тактовых подинтерва- лов формируют сигналы управления с длительностью А 12РсМ(Г-1 )(21-1) в крайней правой части интервала, расположенного между указанными под- интервалами, формируют сигнал управления с продолжительностью
А -fl-p-12F0N(l-1) в диа
N
пазоне частот -я- F0 - NF0 продолжительность тактовых подинтервалов изменяют в соответствии с зависимостью r
правой крайней части которых формируют основные сигналы управления с продолжи- 1/11
I-..-и
тельностью А
на всем
г0 „у диапазоне регулирования для каждого основного вентиля внутри интервалов 0-30,
(V)
СО
(150)-180. 180-210, и () I UU. I JW f. IV, t л )
- 360 эл.град. синтезируют дополнительные паузы и участки проводимости (дополнительные сигналы управления), при этом местоположения ближних к границам полупериодов фронтов 1-х по счету дополнительных сигналов управления на интервалах 0-30, 180-210 эл.град, определяют
соответственно как
60 fSl ) и 180.
№11э„,рад,
0) i
-)-180и(330-F0Nна интервалах
(О
-)-360 эл.град.
указанные ближние к границам полупериодов фронты формируют путем сдвига на 60 эл.град. в сторону опережения ближних к середине полупериодов фронтов соответствующих одноименных основных сигналов управления с продолжительностью А .при этом длительность у дополнительных сигналов управления находят из функциональной зависимости
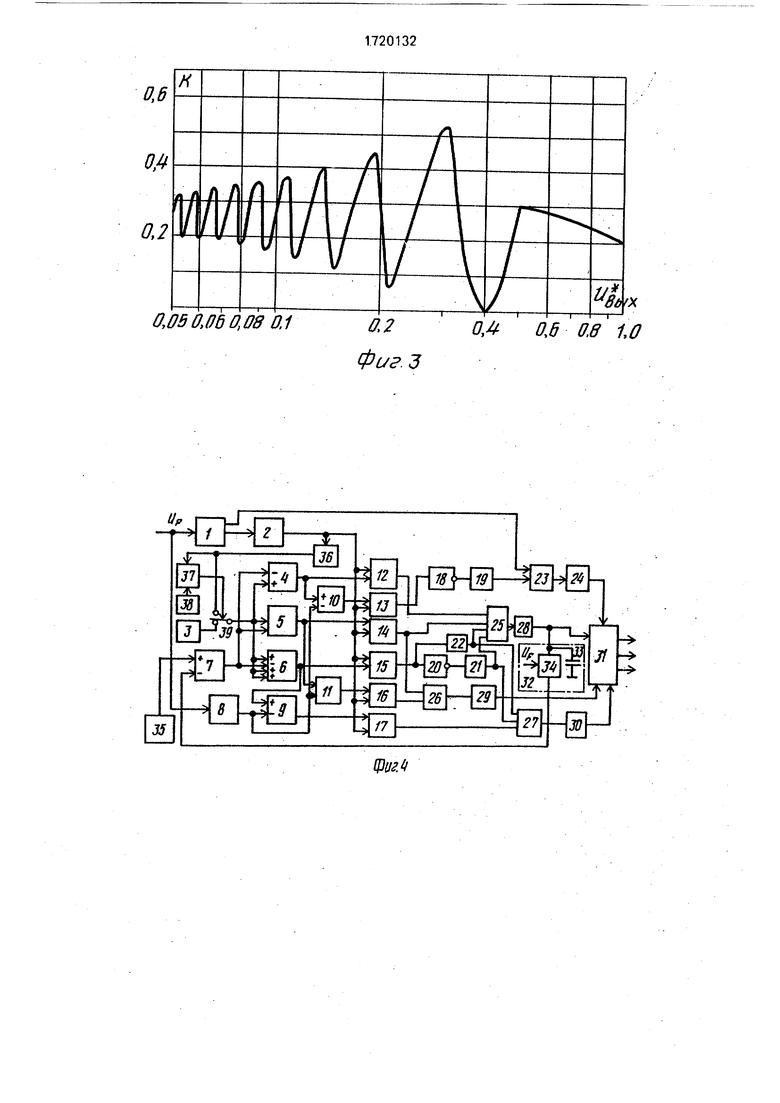
у К(.т- А ),где численное значение коэффициентов К в каждой точке диапазона регулирования определяют при помощи кривой, построенной на фиг.З.
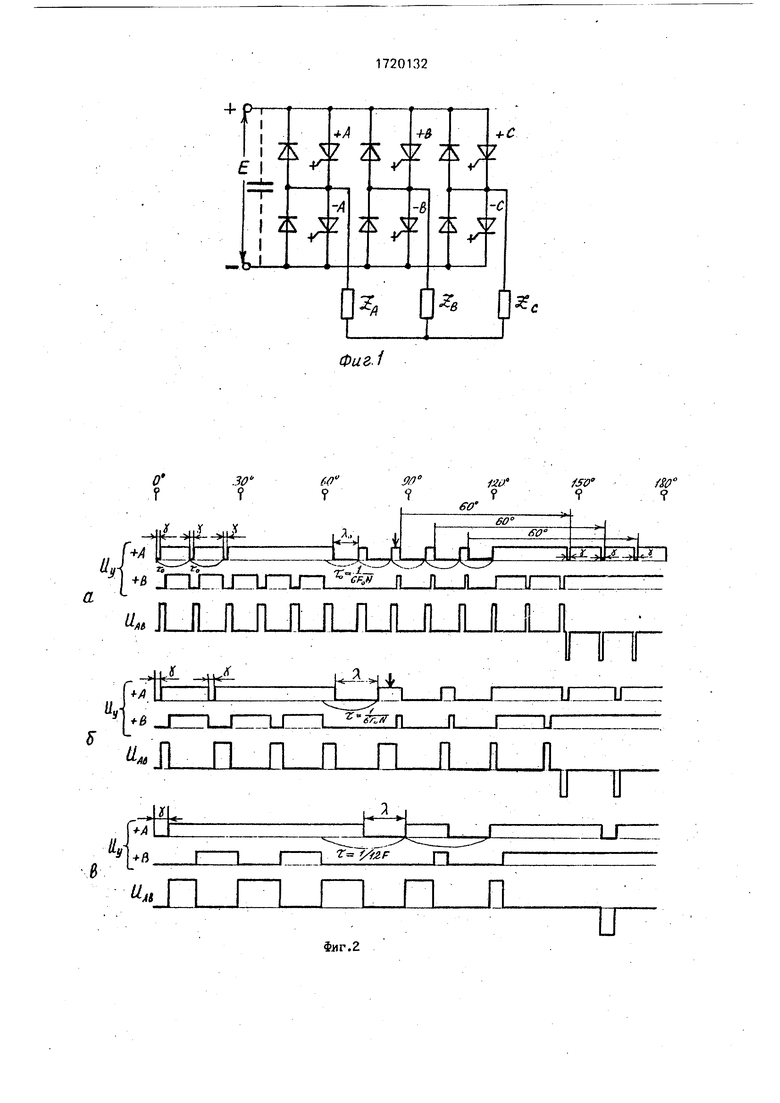
На фиг.1 представлена упрощенная структура силовых цепей трехфазного одно- мостового преобразователя, выполненного на полностью управляемых вентилях; на фиг.2- временные диаграммы, иллюстрирующие процесс осуществления приемов
10
15
20
25
30
35
40
45
50
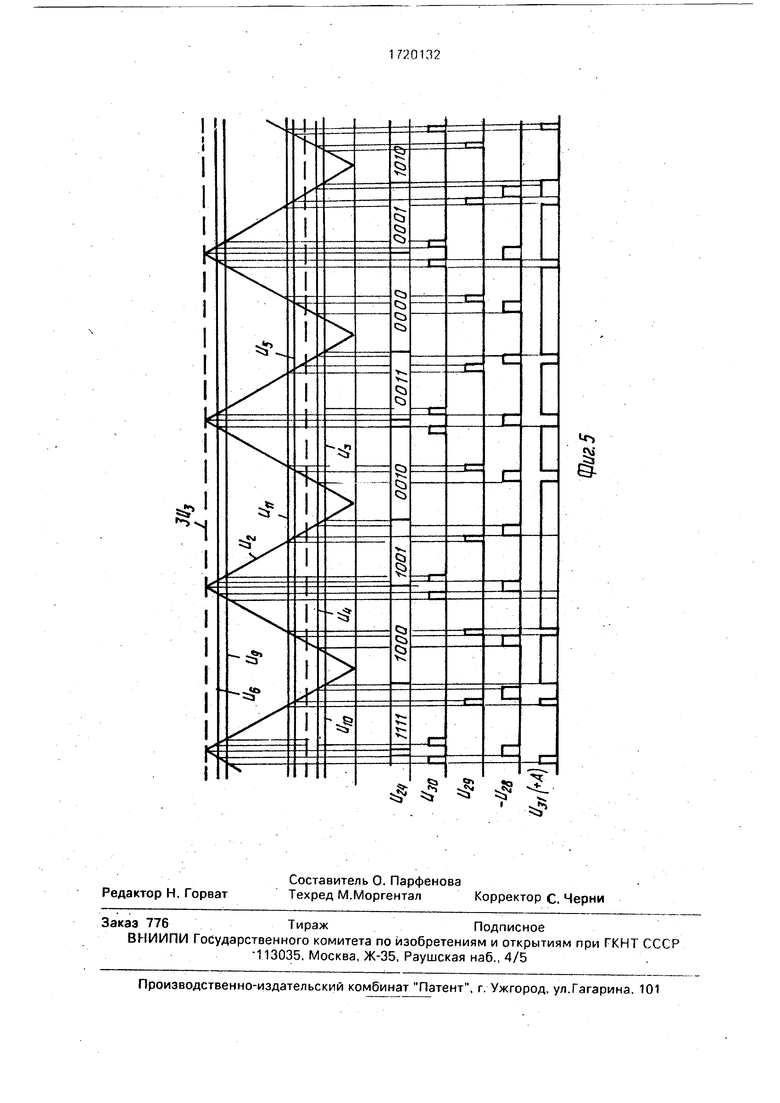
предложенного способа управления: на фиг.З - кривая зависимости величины коэффициента К от относительной выходной частоты; на фиг.4 и 5 - функциональные схемы системы управления, реализующей указанный способ, и диаграммы, поясняющие алгоритм ее работы.
Временные диаграммы, представленные на фиг.2, соответствуют варианту связанного регулирования частоты и величины выходного напряжения преобразователя в пятикратном диапазоне (N 5). На фиг.2а изображены циклограммы управляющих сигналов Uy вентилей +А и +В преобразователя на начальной выходной частоте F на полупериоде выходной частоты и соответствующая этому кривая линейного выходного напряжения преобразователя UAB. Весь центральный тактовый интервал 60-градусной продолжительности разбит при этом на пять подинтервалов длительно- 1
стью Т Т0
12 эл.град. каждый,
6F0N показанных на фиг.2 а дугами.
В правой крайней части каждого подынтервала на указанном тактовом интервале зоны проводимости вентиля -А формируются основные запирающие вентили сигналы
N - 1 . ,2
управления с длительностью
6 Fo N
9,6 эл.град. Моментам формирования запирающих вентили импульсов на фиг.2 соответствует нулевой уровень сигналов, а проводящему состоянию вентилей - положительное значение сигналов Uy. Аналогично формированию основных запирающих сигналов на интервале 60-120 эл.град. на тактовом интервале 240-300 эл.град, осуществляется синтезирование основных включающих вентили сигналов управления Uy.
Одновременно с основными сигналами управления внутри крайних участков зон проводимости и закрытого состояния вентилей формируются дополнительные сигналы управления, начальное число которых для варианта равно трем. Как показано на фиг.2а, местоположения ближних к границе полупериодов фронтов i-x по счету дополнительных сигналов на участках 0-30 и 180210 эл.град. находятся как
гп N
5
180
, 60FQ-1)
,- .. эл.град., что при аналиГо N
зируемом варианте для первого полупериода на частоте F0 дает значения: 0; 9.6 и
(О
19,2 эл.град. На участках (150 А
-)- 180
(О
и (330 ) - 360 эл.град. отмеченные
фронты дополнительных сигналов формируют путем сдвига на - 60 эл.град соответствующих одноименных основных сигналов управления. Длительность у дополнительных сигналов управления на начальной частоте F0 находится как: у К (т-А) К(г0 -Ао) 0,31 (12-9,6) 0,81 эл.град., где значение ,31 выбрано как частоты F0 в соответствии с кривой, построенной на фиг.З, для точки
Увыхтах
U
вых N
0,2.
Fl F
1 )(2I -1 ) + 1
п + 1
-75-для нечетных п и
Регулирование частоты и величины выходного напряжения преобразователя для рассматриваемого способа асимметричного управления осуществляется за счет постоянной плавной вариации длительностей пауз между основными сигналами управления и самих основных управляющих сигналов на близлежащих к центрам тактовых интервалов участках, сопровождаемой изменением продолжительности у дополнительных сигналов по нелинейной зависимости. Частотный диапазон работы
преобразователя от частоты F0 до -й- F0
разбивается при этом на поддиапазоны. Границами указанных поддиапазонов являются значения выходных частот, определяемые как F, F0 2 (| Д()() +Г И
2(I-1)N
причем
2ТГ
Fi1 Fi. I I + 1 для четных п, где n - количество
формируемых основных сигналов управления внутри тактовых интервалов. Внутри отмеченных поддиапазонов регулирование преобразователя осуществляется по двум опорным алгоритмам. На поддиапазонах регулирования, при которых Fi F F i+i, внутри ( в крайней правой части) всех тактовых подинтервалов, начало первого и конец последнего из которых синхронизируется соответственно с началом и концом тактового интервала, формируютсяосновные сигналы управления с продолжительностью
Я Т(Ц1-1)- (Г - -РТЫ) Изменение частоты (длительности тактового интервала) производится при этом за счет изменения продолжительности ближайшего с левой стороны к центру тактового интервала им
0
5
5
0
0
5
0
5
5
0
пульса кривой линейного выходного напряжения преобразователя соответствующей на интервале 60-120° центральной паузе между сигналами управления, которая в момент достижения выходной частотой значения FI уменьшается до нуля.
В диапазонах частот FI F внутри (1-1)- и правых и (I-2)- и левых от середины полупериода тактовых подинтервалов формируются сигналы упавления с постоянной продолжительностью определяе,, 4 ( i - 1 )2 - 1
мои как Я --T2F0N(I-1 )(21-1) В крайней правой части интервала расположенного между указанными подин- тервалами, формируется основной сигнал управления регулируемой длитель,„ 1 2(i-1)(2i-3) + 1 ностиА -,.-1-,
путем изменения которой регулируется выходная частоты преобразователя. Уменьшение величины А до нуля наблюдается на граничных частотах F| ..B диапазоне повышенных выходных частот преобразоватеNля при NF0 F -n-Fo продолжительность
каждого из двух подинтервалов г определяют как т 1гпгс внутри каждого тактового подинтервала, в его крайней правой части формируется по одному основному сигналу управления с дли- 1 .1
тельностью А
T2F
-. На краIZrW
ях зон управления при этом формируется по одному дополнительному сигналу управления.
На всем рабочем диапазоне .преобразователя переход от одного поддиапазона регулирования к другому производится безударным методом, при помощи плавного изменения продолжительностей соответствующих сигналов управления и пауз между ними. Описанный режим управления обеспечивает при этом практическое постоянство отношения первой гармоники выходного напряжения преобразователя к частоте при изменении последней в широких пределах, а также значительное улучшение гармонического состава выходного напряжения в каждой точке диапазона регулирования.
При анализируемом варианте связанного регулирования частоты и величины выходного напряжения преобразователя в диапазоне нечетного количества раз () на первом поддиапазоне регулирования изменение (увеличение) частоты (уменьшение длительности периода) выходного
сигнала производят за счет уменьшения продолжительности, показанного на фиг.2, а стрелкой левого центрального на тактовом интервале основного включающего импульса. Продолжительность запирающих вентили основных сигналов управления при этом изменяется в соответствии с функциональной за1( 11
Ь(2 - 1) (Т ТсГТ
-зттг Отмеченный процесс
%JU I гО Го Г
продолжается до момента достижения выходной частотой преобразователя зна2Q-1 )N
висимостьюЯ
чения РЗ 20
2(1-1 )(2I -1 )-1 FO, при котором длительность укамостиЯ
6Т
120Ро
ростом частоты, достигая ния на частоте
20 г.
и уменьшается с нулевого значеF3l
13
19
занного основного зключающего импульса уменьшается до нуля.
На следующем подынтервале регулирования длительность А всех основных сигналов управления, за исключением центрального, остается неизменной и равной Я1 лп г /а продолжительность центрального основного сигнала управления определяется из функциональной зависи- 113
На очередном поддиапазоне работы преобразователя, наблюдаемом в диапазо20не частот от Рз -yj- F0 до Fa 2F0 и
характеризующемся уменьшенным на единицу значением индекса i (), регулирование частоты осуществляется, как и на первом поддиапазоне, за счет уменьшения вплоть до нуля продолжительности показанного на фиг,26 стрелкой левого центрального основного включающего вентили импульса при синхронном изменении (уменьшении) продолжительности выключающих основных сигналов управления. Число дополнительных сигналов управления при этом равно двум.
Дальнейшее изменение левого от центра тактового интервала основного сигнала управления производится в соответствии с зависимостью
12 + 111
Я
6Т
при
FO 6 F 20 Fo
неизменной длительности второго сигнала, -j
равной К пР°Д°лжается до мо
мента достижения частотой значения F - FO,
Начиная с указанной частоты F -у- F 0 и
до номинальной выходной частоты преобразователя NF0 внутри тактовых интервалов формируется по два тактовые подинтерва- ла равной продолжительности, определяемой как т -ттттг/в правой части которых
синтезируются основные сигналы управления с уменьшающейся с ростом частоты
продолжительностью Я .ТТРТГ
30
35
40
достигающей нуля на номинальной выходной частоте преобразователя.
Количество дополнительных сигналов управления, формируемых внутри крайних 20 тридцатиградусных отрезков зон управления, в процессе регулирования плавно уменьшается от величины, равной
N НИк, N
-д-г- для нечетных N и -у-для четных N,
25 до одного дополнительного .импульса, формируемого в зоне повышенных выходных
частот преобразователя, при F F0
(фиг.2в). Построенная на фиг.З кривая значений коррелирующего коэффициента К, связывающего продолжительность у дополнительных сигналов управления с длительностью основного массива импульсов выходной кривой преобразователя, показывает его существенно нелинейный характер. Взаимосвязь между текущими значениями выходной частоты F и отложенной на фиг.З по оси абсцисс относительной величиной выходного напряжения преобразователя ивых определяется при этом из соотношения -p-jq-
Так, на номинальной частоте преобразователя NF0 (U вых 1) для всех режимов
45 значение К 0,2, соответственно в относительных единицах продолжительность удополнительных управляющих импуль- . сов (и дополнительных импульсов кривой выходного напряжения) при этом равна
50 у К (г-Я) 6 эл.град.
Принцип построения систем управления вертикального типа, реализующих описанный способ управления применительно к варианту , рассмотрим на примере ус55 тройства, функциональная схема которого приведена на фиг.4. Генератор-тактовых импульсов 1, на вход которого поступает аналоговый сигнал .задания частоты Ur, формирует на своем - первом выходе последовательность коротких импульсов, частота следования которых на всем диапазоне регулирования в 12 раз превышает выходную частоту инвертора, которая, поступая на вход генератора линейно-изменяющегося напряжения 2, синхронизирует его работу, благодаря чему на выходе генератора 2 формируется симметричное пилообразное напряжение развертки шестикратной по сравнению с выходным сигналом инвер- тора частоты. Источник опорного напряжения 3 связан с плюсовыми входами сумматоров 4-6, на другие входы которых приходит сигнал с выхода интегратора 7. Выход функционального преобразователя 8 присоединен ко входам блока перемножения 9, другой вход которого связан с выходом интегратора 7. Сигнал с выхода перемножителя 9 поступает на входы сумматоров 10 и 11, связанных также с выхода- ми сумматоров 4 и 5.
Выход генератора развертки 2 связан с первыми входами компараторов 12-17, на вторые входы которых приходят сигналы соответственно с сумматоров 4-6 и 10-11. На выходах всех компараторов включены формирующие цепи, состоящие, как показано применительно к компараторам 13 и 15, из логических инверторов 18 и 20 и дифференциаторов (дифференцирующих цепей 1922, формирующих короткие однополярные импульсы в моменты равенства сигналов на входах компараторов 12-17, которые через дизъюнктуры 25-27 последовательно поступают на входы счетных триггеров 28-30 и вызывают их периодические срабатывания. Сигналы (импульсы) от узла 19 и со второго выхода тактового генератора 1, частота следования импульсов с которого в 6 раз превышает выходную частоту преобразова- теля, через дизъюнктор 23 поступают на вход четырехразрядного регистра 24. Выходы триггеров 28-30 связаны с информационными входами логического распределителя управляющих импульсов 31, выход триггера 28 подсоединен также ко входу блока определения суммарной длительности выходных импульсов 32. На входе блока 32 включен конденсатор 33, выделяющий постоянную составляющую последовательно- сти импульсов р выхода триггера 28.
Напряжение конденсатора 33 поступает далее на делитель 34, в котором осуществляется его деление на аналоговый сигнал задания выходной частоты UF, в результате чего на выходе блока 32 в соответствующем масштабе формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов. Этот сигнал поступает на минусовой вход интегратора 7, плюсовой вход которого связан с источником постоянного опорного напряжения 35, Выходы регистра 24 присоединены к тактовым входам распределителя 31.
Нз фиг.5 представлены временные диаграммы, поясняющие принцип действия системы управления. Индексы сигналов на фиг,5 при этом соответствуют нумерации узлов и блоков системы, приведенной на фиг.4. Амплитуда развертывающего сигнала U2 генератора 2 уменьшается пропорционально росту выходных частоты преобразователя и постоянно фиксируется датчиком амплитуды 36, выходной сигнал которого поступает на первый вход схемы 37, второй вход которой связан с источником постоянного напряжения 38. Выбор напряжения источников 3 и 38 производится в соответствии с условиями:
U2макс N
J 3
- -х- U2.
- -и2макс
N
2 3
U2
макс
где 112макс - максимальная амплитуда сигнала U2, наблюдаемая на начальной выходной частоте преобразователя. Величина сигнала 11з определяет при этом продолжительность тактовых подинтервалов на нижнем частотном поддиапазоне. Амплитуда сигнала на выходе интегратора 7 пропорциональна длительности основных выходных импульсов кривой выходного напряжения. Одновременно с формированием основного массива выходных импульсов при помощи сигналов формируемых на выходах триггеров 29 и 30, производится формирование дополнительных импульсов, продолжительность которых в каждой точке диапазона регулирования определяется величиной выходного сигнала, снимаемого с выхода блока перемножения 9, на первый вход которого с блока 7 приходит сигнал,
О) пропорциональный величине (т-А ), а
на второй поступает сигнал от функционального преобразователя 8,связанного по входу с сигналом задания UF и формирующего на своем выходе в соответствующем масштабе аналоговый сигнал, величина которого пропорциональна значениям сопрягающего коэффициента К.
На выходах сумматоров 4-6 в соотвест- вии с приведенной схемой их соединения синтезируются сигналы, определяющие моменты формирования фронтов основных импульсов кривой выходного напряжения преобразователя. Контур внутренней обратной связи системы, включающий узлы и блоки 28, 32-34 и 7, обеспечивает на всем диапазоне регулирования непрерывное осуществляемое по астатическому принципу формирование корректирующего сигнала, поступающего на входы сумматоров 4-6 и автоматически поддерживающее постоянство суммарной вольт-секундной площади выходных импульсов на полупериоде в процессе изменения выходной частоты. В этом случае производится автоматическая реализация представленных в первой части описания функциональных зависимостей между продолжительно- стями сигналов управления, их временным положением и значениями выходной частоты преобразователя, осуществляется автоматический переход от одного поддиапазона регулирования к другому, наблюдаемый на граничных частотах РГи FI, а также при помощи ключа 39, управляемого по команде с выхода схемы сравнения 37, переход от низкочастотного режима управления к высокочастотному, имеющий место, на частоте 2 FO.
Благодаря приведенному включению четырехразрядного регистра 24, вход которого связан с выходом компаратора 13 через дифференциатор 19, обеспечивается требуемая асимметрия заона формирования управляющих сигналов. Выраженные в цифровой форме состояния выходных разрядов Q, Оз, Q2, QI регистра 24 на периоде выходной частоты записываются соответственно как: 1000, 1001, 0010, 0011, 0000, 0001. 1010, 1011, 1100, 1101, 1110, 1111. Логические функции, реализуемые распределителем 24 и поступающие в форме управляющих сигналов на вентили инвертора, при этом имеют следующий вид.
-А Q4Q3Q2Q1U29 + CMQaCteQi +
+ CMQaCteChUaO + Q4d3Q2QlU29 + + Q2U28 + Q3U28 + Q4CHU29 +
+ ШЬшСЬиаэ + CUQ1 изо,
+B CUQ2QlU29 + CUQ2Q1 + + ОзШСШзО + Q3Q2Q1U29 + Q2U28 + +5 Q2U28 + CUQlU29 +
+ Q4Q3Q2CHU29 + Q4QiU3o; +C CteQzQlLteo + QsQ2Qi +
,+ Q4Q2QlU30+Q/lQ2QlU29 + Q.U28 + + Q3U26 + Q4Q3QtU29+
5 + Q4Q2QiU29 + Q4Q2Ghll30
Таким образом, предложенный способ управления трехфазным вентильным преобразователем на базе инвертора напря0 жения, при котором на всем диапазоне связанного регулирования частоты и величины выходного напряжения обеспечивается плавный безударный переход от одного поддиапазона регулирования к другому, по
5 зволяет за счет формирования дополнительных компенсирующих импульсов улучшить гармонический состав выходного напряжения за счет полного исключения из спектра на всем диапазоне регулирования пятой
0 гармонической составляющей и существенного снижения амплитуды седьмой гармоники.
Эти наиболее близкие к основной гармоники создают максимальный тормозной
5 момент асинхронных двигателей, питаю щихся от преобразователей, их исключение позволяет значительно снизить потери в преобразовательной системе и нагрузке и улучшить качество процесса регулирования в
0 целом.
Формула изобретения Способ управления трехфазным вентильным преобразователем, заключающийся в том, что в процессе М-кратного
5 регулирования частоты и величины выходного напряжения вентили разных фаз преобразователя периодически включают и выключают с взаимным фазовым сдвигом в 60 эл.град., при этом для каждого венти0 ля в течение одного полупериода от 0 до 180 эл.град, формируют зону проводимости, в течение другого полупериода от 180 до 360 эл.град, формируют зону закрытого состояния, внутри тактовых интервалов
5 проводимости от 60 до 120 эл.град, и тактовых интервалов закрытого состояния вентилей от 240 до 300 эл.град. формируют .. разноименные с соответствующей зоной управления сигналы управления, количество
0 которых последовательно уменьшают с ростом выходной частоты F преобразователя, причем на начальной выходной частоте F0 внутри тактовых интервалов формируют N подинтервалов одинаковой на всем
5 диапазоне регулирования длительности, 1
равной Г0
конце каждого из ко6F0N
торых на всем диапазоне регулирования формируют сигналы управления с началь-jN-1
ной продолжительностью /Ц -g-,
6 Fo N
отличающийся тем, что, с целью улучшения гармонического состава выходного напряжения преобразователя в процессе плавного безударного перехода от одного поддиапазона регулирования к другому, в диапазоне частот F0 - (N/2) F0 продолжительность тактовых подинтервалов поставляют постоянной и равной г0, начало каждого первого и конец каждого последнего тактового подинтервала синхронизируют с началом и концом соответствующего тактового интервала, формирование каждого 1-го по направлению от конца к середине тактового интервала сигнала управления (каждого (1-1)-го от начала тактового интервала сигнала) осуществляют при изменении выходной частоты преобразователя от F0 до
2 ( - 1 ) N -s 3 ч + причем при
РГ Fo
2(1 -1 )(2i изменении выходной частоты от F0 до FI 2 (. I - 1 ) N
СГ
внутри каждо °Т( -l)(2i -1 )-1 го тактового поди-нтервала формируют сигнал управления с длительностью
А 6(2i1-1) (Г Т5Тг)при R F F внутри (1-1)-х правых и (i-1)-x левых от середины полупериода тактовых подинтервалов формируют сигналы управления с дли,,4(i-1)2- 1
тельностью А 12 F0 М (I )
в крайней правой части интервала, расположенного между указанными под интервалами, формируют сигнал управления с продолжительностью
0
5
0
5
0
А
1 2(i -1)(2i -3) + 1
: , - А., в диа.
пззоне частот N/2 F0 - NF0, продолжительность тактовых подинтервалов изменяют в
соответствии с зависимостью т - - ту-р- в
правой крайней части которых формируют основные сигналы управления с длительностью А 1/12 (1/F - 1/FoN), и на всем диапазоне регулирования для каждого основного вентиля внутри интервалов 0-30, (150 -А{1)/2)- 180, 180-210 и (330 - АГ)/2)- -360 эл.град. формируют дополнительные сигналы управления, при этом местоположение ближних к границам полупериодов фронтов 1-х по счету дополнительных сигналов управления на интервалах 0-30 и 180-210 эл.град. определяют соответственно как 60
0 F0 -1-1 Гюпа 60 F(l -1 )
iг м (1 НП 4-- --J- cm гпдп
N FoLN Fo эл.град..
На интервалах (150 - А (1)/2) - 180 и.(330- ti jf
/2} - 360 эл.град. указанные ближние к границам полупериодов фронты формируют путем сдвига на 60 эл. град, в сторону опережения ближних к середине полупериодов фронтов соответствующих одноименных основных сигналрв управления с продолжительностью А Ч при этом длительность у дополнительных сигналов управления находят из функциональной
(О
зависимости у -К (т-А ),где численное значение коэффициента К в каждой точке диапазона регулирования определяют при помощи кривой, построенной на фиг.З.
)ъ ф (}
с



Изобретение относится к силовой преобразовательной технике. Целью изобретения является улучшение спектрального состава выходного напряжения преобразователя в процессе широкодиапазрнного связанного регулирования частоты и величины напряжения. Способ управления базируется на универсальном 180-градусном алгоритме несимметричного управления трехфазным составным инвертором, при котором основная последовательность управляющих (модулирующих) сигналов формируется асимметрично центру полупериода внутри средних на полупериодах тактовых интервалов 60-градусных продол- жительностей. Благодаря последовательной от шага к шагу вариации длительностей срединных на тактовых интербалах импульсов управления и пауз между ними процесс регулирования преобразователя сопровождается плавным безударным изменением количества импульсов в полуволне выходной кривой. Одновременно с формированием основной последовательности управляющих сигналов на всем диапазоне регулирования внутри крайних участков зон управления, продолжительность которых близка к 30 эл.град.. формируют дополнительные сигналы управления, местоположения ближних к границам полупериодов фронтов которых определяют путем специального фазового сдвига соответствующих фронтов одноименных основных сигналов управления, а продолжительность дополнительных сигналов находится в нелинейной зависимости от длительности основного массива выходных импульсов, 5 ил. Ч ГО О W го
Фиг.1
.30
iJ ul
М
л
// J
+ ГП Г1Г-1 ГП Г ° П П -И Г
.
fciЈ
Л
Л1
«. JLJULJULJULJULJUbLJ
И.M-t±f3E±
1 етп П Г
а.П П П П П П П П
юг
tsv°
«
Ли
Л
3
ЕЗ
Л1
тгт
0,050,060,08 0.1
0,2 Фиг.З
0,4 0,6 0,8 1,0
ЛГ
I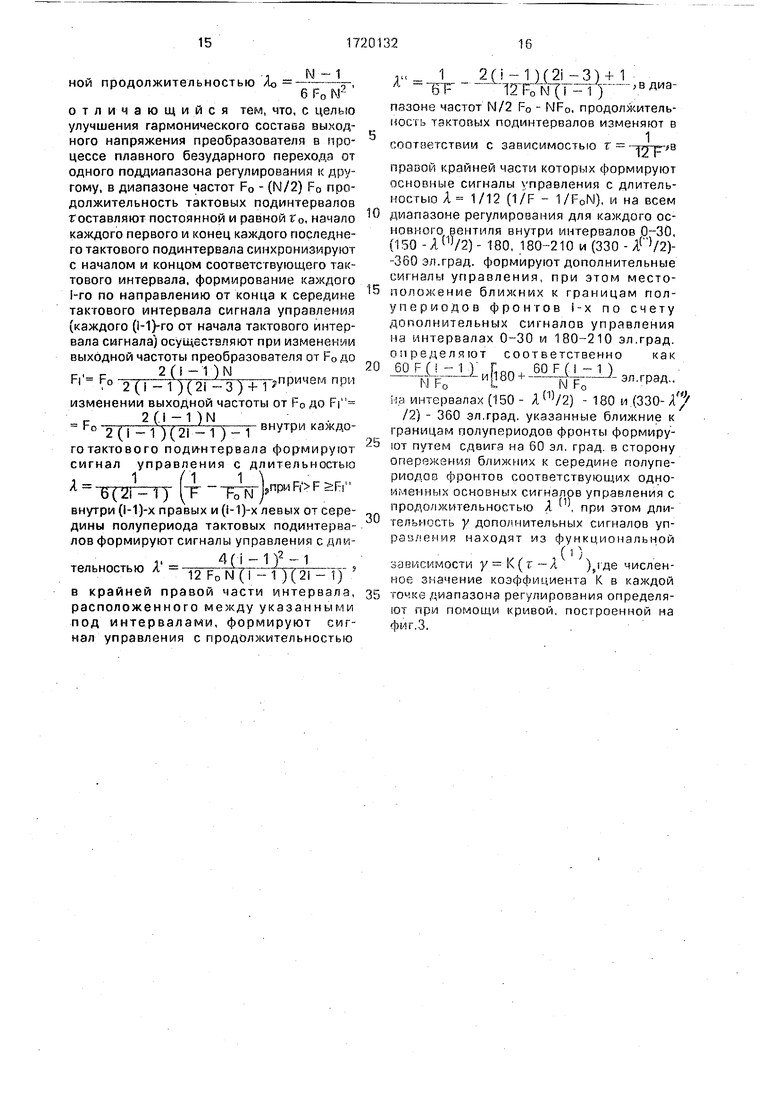
| Забродин Ю.С | |||
| Автономные тиристор- ные инверторы с широтно-импульсным регулированием | |||
| М.: Энергия, 1977, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Насосное устройство для откачивания донной жидкости в буровых скважинах или колодцах | 1923 |
|
SU1169A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Калашников Б.Е., Кривицкйй С.О., Эпш- тейн И.И | |||
| Системы управления автономными инверторами | |||
| М.: Энергия, 1974, с, 33 | |||
