щ
W
е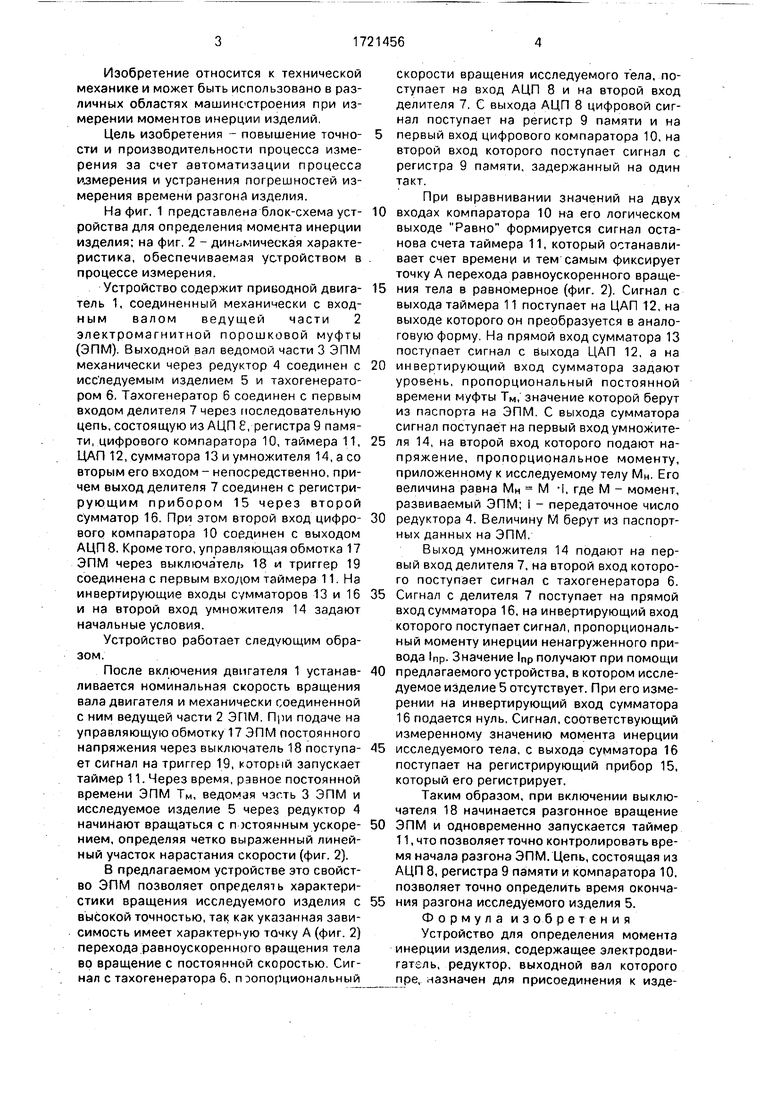
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| Устройство для измерения ширины спектра сигнала радиопередатчиков на различных уровнях | 1991 |
|
SU1798723A1 |
| Следящий привод на электромагнитных порошковых муфтах | 1980 |
|
SU881661A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОРРЕЛЯЦИОННОЙ ФУНКЦИИ | 1992 |
|
RU2037198C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕГЕРМЕТИЧНОСТИ ИЗДЕЛИЙ | 2011 |
|
RU2488794C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕГЕРМЕТИЧНОСТИ ИЗДЕЛИЙ | 2011 |
|
RU2488795C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОТЕРЬ В ТРАНСФОРМАТОРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2563331C1 |
| Устройство для измерения магнитной проницаемости проводящего образца | 1989 |
|
SU1636819A1 |
| Устройство для испытания изделий на случайные широкополосные вибрации | 1985 |
|
SU1298571A2 |
| Корреляционный измеритель времени запаздывания | 1983 |
|
SU1160433A1 |
Изобретение относится к технической механике и может быть использовано для измерения моментов инерции различных изделий. Цель изобретения - повышение точности и производительности измерений за счет автоматизации процесса измерения и снижения их погрешностей. Устройство содержит электродвигатель 1, электромагнитную порошковую муфту (ЭПМ), редуктор 4, к выходному валу которого присоединяется изделие 5, тахогенератор 6, измеряющий скорость вращения ЭПМ, и блок обработки сигнала, включающий аналого-цифровой преобразователь 8, регистр памяти 9. цифровой компаратор 10, триггер 19. таймер 11, цифроаналоговый преобразователь 12, два сумматора 13 и 16, умножитель 14, делитель 7 и регистрирующий прибор 15. 2 ил.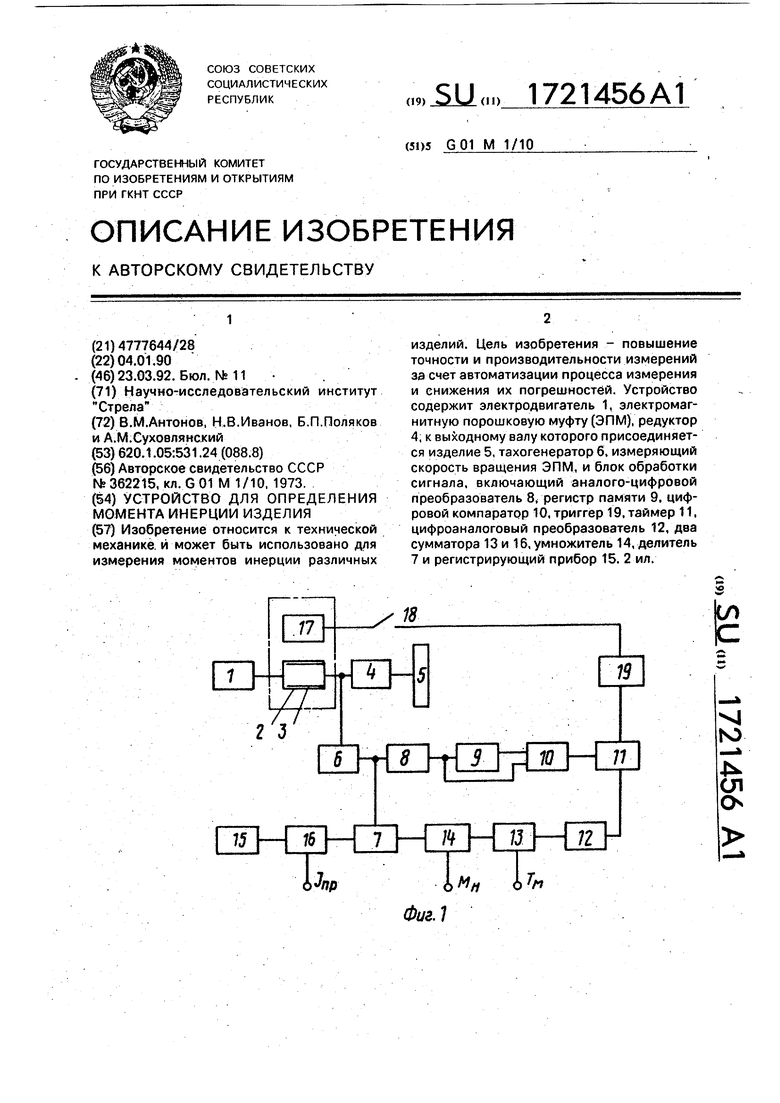
VI ю
Ј ел
Os
Фиг.1
Изобретение относится к технической механике и может быть использовано в различных областях машиностроения при измерении моментов инерции изделий.
Цель изобретения - повышение точности и производительности процесса измерения за счет автоматизации процесса измерения и устранения погрешностей измерения времени разгона изделия.
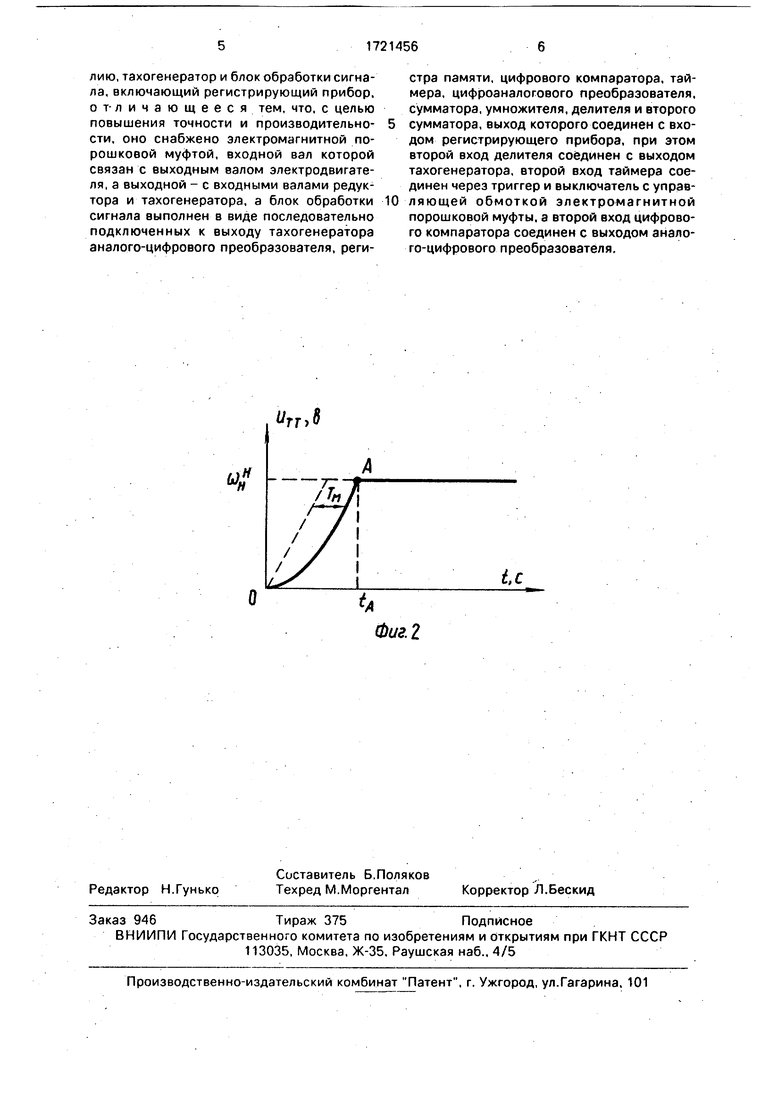
На фиг, 1 представлена блок-схема устройства для определения момента инерции изделия; на фиг. 2 - динамическая характеристика, обеспечиваемая устройством в процессе измерения.
Устройство содержит приводной двигатель 1, соединенный механически с входным валом ведущей части 2 электромагнитной порошковой муфты (ЭПМ). Выходной вал ведомой части 3 ЭПМ механически через редуктор 4 соединен с исс ледуемым изделием 5 и тзхогенерато- ром 6, Тахогенератор 6 соединен с первым входом делителя 7 через последовательную цепь, состоящую из АЦП 8, регистра 9 памяти, цифрового компаратора 10, таймера 11, ЦАП 12, сумматора 13 и умножителя 14, а со вторым его входом - непосредственно, причем выход делителя 7 соединен с регистрирующим прибором 15 через второй сумматор 16. При этом второй вход цифрового компаратора 10 соединен с выходом АЦП 8. Кроме того, управляющая обмотка 17 ЭПМ через выключатель 18 и триггер 19 соединена с первым входом таймера 11. На инвертирующие входы сумматоров 13 и 16 и на второй вход умножителя 14 задают начальные условия.
Устройство работает следующим образом.
После включения двигателя 1 устанавливается номинальная скорость вращения вала двигателя и механически соединенной с ним ведущей части 2 ЭПМ. При подаче на управляющую обмотку 17 ЭПМ постоянного напряжения через выключатель 18 поступает сигнал на триггер 19, которнй запускает таймер 11. Через время, равное постоянной времени ЭПМ Тм, ведомая чэс.ть 3 ЭПМ и исследуемое изделие 5 через редуктор 4 начинают вращаться с постоянным ускорением, определяя четко выраженный линейный участок нарастания скорости (фиг. 2).
В предлагаемом устройстве это свойство ЭПМ позволяет определять характеристики вращения исследуемого изделия с высокой точностью, так как указанная зависимость имеет характерную точку А (фиг. 2) перехода равноускоренного вращения тела во вращение с постоянной скоростью. Сигнал с тахогенератора 6, пропорциональный
скорости вращения исследуемого тела, поступает на вход АЦП 8 и на второй вход делителя 7. С выхода АЦП 8 цифровой сигнал поступает на регистр 9 памяти и на
первый вход цифрового компаратора 10, на второй вход которого поступает сигнал с регистра 9 памяти, задержанный на один такт.
При выравнивании значений на двух
0 входах компаратора 10 на его логическом выходе Равно формируется сигнал останова счета таймера 11, который останавливает счет времени и тем самым фиксирует точку А перехода равноускоренного враще5 ния тела в равномерное (фиг. 2). Сигнал с выхода таймера 11 поступает на ЦАП 12, на выходе которого он преобразуется в аналоговую форму. На прямой вход сумматора 13 поступает сигнал с выхода ЦАП 12, а на
0 инвертирующий вход сумматора задают уровень, пропорциональный постоянной времени муфты Тм, значение которой берут из паспорта на ЭПМ. С выхода сумматора сигнал поступает на первый входумножите5 ля 14, на второй вход которого подают напряжение, пропорциональное моменту, приложенному к исследуемому телу Мн. Его величина равна Мн М -I, где М - момент, развиваемый ЭПМ; i - передаточное число
0 редуктора 4. Величину М берут из паспортных данных на ЭПМ.
Выход умножителя 14 подают на первый вход делителя 7, на второй вход которого поступает сигнал с тахогенератора 6.
5 Сигнал с делителя 7 поступает на прямой вход сумматора 16, на инвертирующий вход которого поступает сигнал, пропорциональный моменту инерции ненагруженного привода 1Пр. Значение Inp получают при помощи
0 предлагаемого устройства, в котором исследуемое изделие 5 отсутствует. При его измерении на инвертирующий вход сумматора 16 подается нуль. Сигнал, соответствующий измеренному значению момента инерции
5 исследуемого тела, с выхода сумматора 16 поступает на регистрирующий прибор 15, который его регистрирует.
Таким образом, при включении выключателя 18 начинается разгонное вращение
0 ЭПМ и одновременно запускается таймер 11, что позволяет точно контролировать время начала разгона ЭПМ. Цепь, состоящая из АЦП 8, регистра 9 памяти и компаратора 10. позволяет точно определить время оконча5 ния разгона исследуемого изделия 5. Формула из об р е т е н и я Устройство для определения момента инерции изделия, содержащее электродвигатель, редуктор, выходной вал которого пре, назначен для присоединения к изделию, тахогенератор и блок обработки сигнала, включающий регистрирующий прибор, отличающееся тем, что, с целью повышения точности и производительности, оно снабжено электромагнитной порошковой муфтой, входной вал которой связан с выходным валом электродвигателя, а выходной - с входными валами редуктора и тахогенератора, а блок обработки сигнала выполнен в виде последовательно подключенных к выходу тахогенератора аналого-цифрового преобразователя, реги
стра памяти, цифрового компаратора, таймера, цифроаналогового преобразователя, сумматора, умножителя, делителя и второго сумматора, выход которого соединен с входом регистрирующего прибора, при этом второй вход делителя соединен с выходом тахогенератора, второй вход таймера соединен через триггер и выключатель с управ- ляющей обмоткой электромагнитной порошковой муфты, а второй вход цифрового компаратора соединен с выходом аналого-цифрового преобразователя.
t,C
Фиг. 2
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ПАРАМЕТРОВ | 0 |
|
SU362215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
