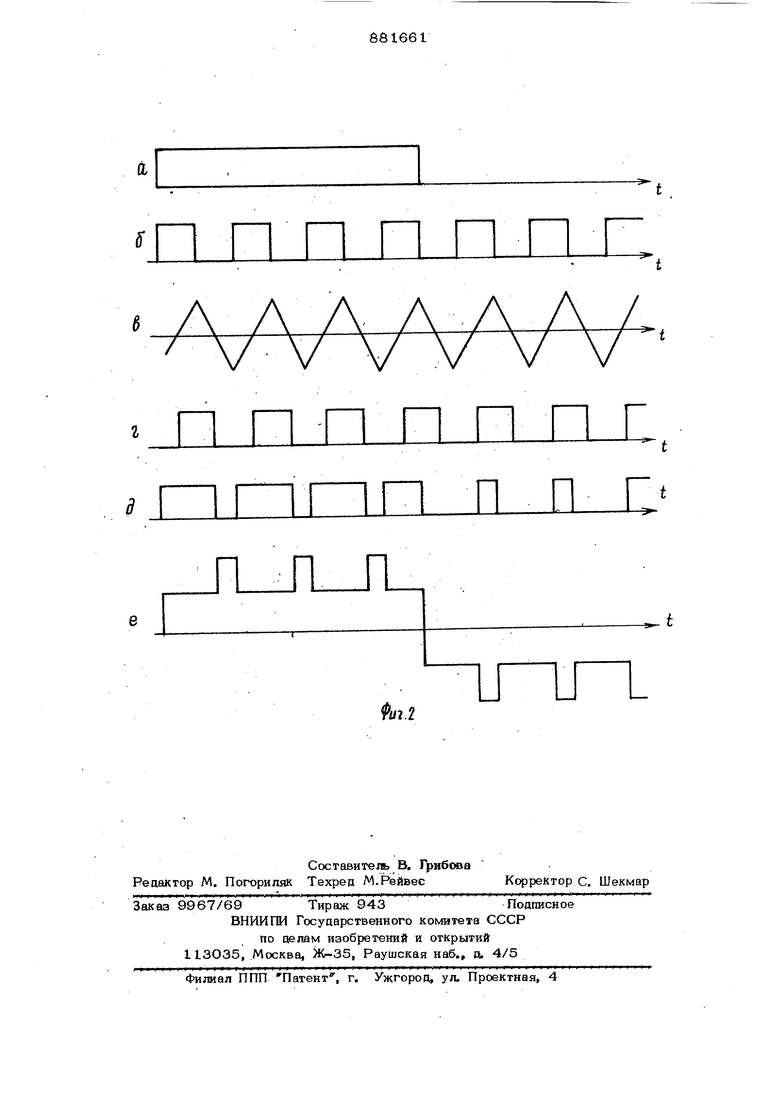
Изобретение относится к автоматике, к системам управления, и может быть применено в следящих приводах, построенных на электромагнитных порошковых муфтах (ЭПМ). Известен привод на ЭПМ, содержащий блок управления с широтно-импульсной модуляцией (ШИМ), блок муфт, датчик скорости, к которому подключены фильтр нижних частот, блок установки начальных режимов и сумматор l . Наиболее близким к изобретению является следящий привод, содержащий последо вательно соединенные генератор периодиче ких сигналов, блок управления, блок муфт, тахогенератор, первый фильтр, блок выделе ния постоянной составл1пощей, блок установки начальных режимов, выходом подклю ченный к второму входу блока управдюния, второй фильтр, вход которого подключен к тахогенератору, а выход - к сумматоpy 2l. Однако при работе привода в динамических системах с широкой полосой пропускания и предельным ускорением, когда полоса пропускания дополнительного контура наиболее приближена к частоте exoptного сигнала возрастает динамическая ошибка. Это найбо/ее присуще системам с максимальными скоростями, соизмеримыми с рабочими скоростями ЭПМ. Целью изобретения является повышение динамической точности следящего привода на ЭПМ. Поставленная цель достигается тем, что в устройство введены последовательно соединенные компаратор, элемент ИЛИ, первый и второй элементы И и масштабный блок, а также третий элемент И, три входа Которого соединены соответственно со вторыми входами сумматора и первого элемента И, с выходом компаратора и с выходом генератора периодических сигналов, а выход - со вторым входом элемента И, вход масштабного блока подключен к выходу сумматора, а выход к третьему входу блока управления. 3 Логические преобразовония решают за дачу определения управлмюшего сигнала блока суммирования гак, что при положи™ тельном входном напряжении к нему прибавляется интегрированный сигаал, учитывающий разницу средних скоростей за период колебаний в дополнительном кон туре, при отрицательном входном напряж нии от него вычитывается интегрированный сигнал. На фиг. 1 приведена блок-схема привода на фиг, 2 - графики сигналов, поясняющие его работу. Устройство содержит блок управления 1, блок МУФТ 2, тахогенератор 3, фильтр 4, .лок установки начальных режимов 5, сумматор б, генератор периодических си налов 7, блок выделения постоянной со-« сгавлющей 8, фильтр 9,компаратор 10, элемент ИЛИ 11, элементы И 12-14, масштабный блок 15. Частота генератора периодических сигналов 7 должна располагаться в области прозрачности (фильтра 9. Последовательно соешшенные блок управления., блок муфт 2, тахогенератор 3, фильтр 4 сумматор 6, масштабный блок 15 и блок управления 1 образуют следящую систем по скорости. Последовательно соединенные генератор периодических сигналов 7 блок управления 1, блок муфт 2, тахогенератор 3, фильтр 9, блок выделения постоянной составляющей 8, блок установки начальных режимов 5 и блок управления 1 образуют контур регулирован начальных токов подмагничивания муфт при отсутствии . . Блок управления с ШИМ 1включает суммирующий и преобразующий каскады, предварительный усилитель и вдзгходные усилители мощности. Он управляет тока, ми блока муфт 2 по зависимости дз--ки , где К - коэффициент передачи блока ( i ,{,-значение рабочих токов муфт (с учетом начальньк токов по магничивания , (pa,) На фиг, 1 между блоком муфт 2 и вы ходной осью (S) не показан редуктор, который выбирают в каждом конкретном случае, исходя из обеспечения необходимой мощности в нагрузке. С выходной 1VI WraIV« .lJ.-J- «- kjiJCi Д- A-LUiL I- e«-f f m. . «J осью соединен тахогенератор 3, выходной сигнал которого поступает Havсумматор б через сглаживающий фильтр 4 к на вход блока 8 через фильтр 9. Посiтоянное напряжение с выхода блока 8 поступает на управляющий вход блока 5. В блоке 5 осуществляется регулировка начажзных токов подмагничивания муфтой -JQ , 1о2 гак, что ни выходе блока муфт 2 устанавливаются равные моменты вращейия при отсутствии Odw Выходной сигнал фильтра 9 пбЬтупает через компаратор 10 на вход элемента ИЛИ 11 и элемента И 14. На второй вход элемента ИЛИ поступает напряжение генератора 7 (§ }, В элементе ИЛИ происходит суммирование двух сигналов: (J и 2. (фиг. 2). После суммирования сигнал поступает на элемент И 12, на второй вход которого поступает сигнал со входа привода (И ) Элементы 11 и 12 вырабатывают управляющий сигнал для масштабного блока 15 при положительном входном напряясе- НИИ приводаи%;рр а элемент 14 - при отрицательном входном напряжении привода. На вход элемента 14 поданы инверсивный сигаал входного напряжения привода С(., сигнал генератора 7сГ и сигнал компаратора 102 . В масштабном блоке происходит преобразование масштаба напряжения логических схем в масштаб напряжения управления и сложения сигналов д и . выходной сигнал масштабного является управляющим сигналом блока управления в . Таким образом кU Jnoвводится динамическая у .. поправка: приположительном иу рДОположительна, возрастает ток l. Поправка вводится в период времени, когда в контуре регулирования начальных токов подмагничивания должен увеличиться ток-fg изцрнения.ускорения от действия контура самонастройки начальных токов муфт, при отрииательнбм D)j}p 1 3 отрицательна, возрастает ток 12. поправка вводится в период вре- мени7 когда в контуре регулирования начальных токов подмагничивания увеличьвается ток 1 Привод работает следующим образом. При равенстве начальных моментов муфт и введении на вход блока 1 импульсов С1 на выходе привода устанавливают колебшшя скорости v , среднее значение которых равняется нулю. На выходе блока 8 управляющее напряжение отсутствует и начальная настройка токов подмагничи fвания do-ff O) не изменяется,. Если баланс момеатов нарушится, -то напряжение на входе блока 9 изменится, в блоке 8 выделяется постоянное напряжение, ко58торсе возцейсгвует нга блок 5 и вводит поправки к токам -lo-f ,1o2i баланс моментов на выхощэ привода. Баланс моментов муфт осуществлен, колебания скорости симметричны и напряжение на выходе компаратора 10 повторяет последовательность импульсов генератора 7 со сдвигом на четверть периода 1 -В элементе ИЛИ 14 происходит логическое сложение двух последовательных импуль сов (5 и . Суммарный сигнал д поступает на схему И 12, на второй вход которой подается (J(jpQ. На входе 12 сигнал инвертируется и поступает на блок 1. Схема 14 вьтолнена в виде логической И-Не, так как на одном из входов присутствует О или си.гнал UVPP го на выходе 14 будет 1 и Sv схема 13 пропускает сигнал схемы И 13 На выходе 13 сигнал снова инвертирую ется д В блоке 15 этот сигнал преобразуется в инверсный и масштабируется с напряжением Ug так, что на входе блок 1 действует напряжение вида В. В результате применения привода рас ширяются его функциональные возможности, так как обеспечивается высокая чувствительность, статическая и динамическая точность. Схема привода отличается простотой, реализуется на современной элементной базе и не потребует дополнительной подготовки производства. Формулаизобретени.я (Следящий привод на электромагнитных порошковых муфтах, содержащий по1следовательно соединенные генератор периодических сигналов, блок управления, лок муфт, тахогенератор, первый фильтр блок выделения постоянной составляющей, блок установки начальных режимов, выходом подключенный к второму входу блока управления, второй 4ильтр, вход которого подключен к тахогенератору, а выход - сумматору, отлич. ающийс я тем, что, с целью повышения го« ности привода, в негс{,введаны последовательно соединенные компаратор, элемент ИЛИ, первый и второй элементы И и масштабный блок, а также третий элемент И, три входа которого соединены соответственно со вторыми входами сумматора и первого э/емента И, с выходом компаратора и с выходом генератора периодических сигналов, а выход - со вторым.входом второго элемента И, вход Масштабного блока подключен к выходу сумматора, а выход - к третьему входу блока управления. Источники информации, принятые во внимание при экспертизе 1. Панкартьев Л. Д. Импульсные и релейные привоцы с электромагнитными- муфтами. М., Энергия, . 2. Авторское свидетельство СССР № 696409, кл. GO5 В 11/14, 1976 (прототип).
t
п п

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU696409A1 |
| Устройство управления приводом на электромагнитныхых порошковых муфтах | 1973 |
|
SU458938A1 |
| Устройство для управления реверсивным приводом | 1972 |
|
SU612374A1 |
| Устройство для автоматической компенсации емкостного тока однофазного замыкания на землю | 1982 |
|
SU1107215A1 |
| Устройство для автоматической компенсации емкостного тока однофазного замыкания на землю | 1982 |
|
SU1107214A1 |
| Устройство для определения момента инерции изделия | 1990 |
|
SU1721456A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ СЛЕДЯЩЕГО ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ | 2003 |
|
RU2254663C2 |
| Следящая система | 1987 |
|
SU1439529A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
1Г11 L
U2.2
