Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока, условия работы которых не позволяют использовать машины с узлами скользящего токосъема, т.е. в электроприводах, работающих во взрывоопасных, агрессивных, переувлажненных, разреженных и других подобных средах, а такзке в сверхмощных высоко горных электроприводах.
Известны устройства для управления электроприводом переменного тока, содержащие электрическую машину с фазным ротором и преобразователь частоты для питания электрической машины. Такие устройства содержат два канала регулирования, позволяющие с высоким качеством переходных процессов управлять работой электрической машины. Для точной ориентации управляемых переменных машины по вектору потокосцепления необходимо обеспечить непосредственное измерение потока, например, с.пойощью датчика Холла или измерительных обмоток на статоре. Наилучшее качество. переходных процессов мох(но обеспечить при непосредственном управлении. моментс л регулируемого двигателя Q .
Однако в указанных устройствах управление моментом осуществляется не непосредственно, а через активную составляющую тока статора, направленную перпендикулярно к вектору потокосцепления статора или ротора, что снижает точность регулирования.
Такие системы содержат обычно делительные устройства для пересчета
0 сигнала момента в сигнал задания активного тока статора и для расчета частоты вращения вектора потокосцепления, что усложняет устройство управления.
5
Наиболее близким по технической сущности и достигаемому результату, к изобретению является устройство для управления электрической машиной переменного тока, подключенной к
0 преобразователю частоты, содержащее два канала регулирования, построенных в синхронно вращающихся осях d(,,qcr канал регулирования скорости (мощности). Канал регулирования ско5рости содержит задатчик интенсивности, выход которого соединен с элементом сравнения задающего сигнгша и сигнала обратнойсвязи по скорости, получаемого от датчику ркорости. Выход элемента сравнения подключен ко
ВХОДУ регулятора скорости, выход которого соединен с элементом сравнени задающего сигнала по моменту и сигнала обратной связи по моменту. Выход элемгчта сравнения включен на вход регулятора момента. Выход регулятора момента соединен со входом координатного преобразователя. Канал регулирования реактивного тока (мощности ) содержит, регулятор реактивного тока и сигнала обратной связи по реактивнойу току. Шход регулятора реактивного тока соединен со входом координатного преобразователя. Выход координатного преобразователя соединены с соответствующими обмотками машины 2 . .
Однако данное устройство неприменимо для управления бесконтактной машиной двойного питания (БМДП), представлянлчей собой каскад из двух асинхронных машин с фазными роторами на одном валу. При этом статор одной машины подключен к сети, роторы машин соединены электрически, а статор питается от преобразователя частоты. БМДП может быть выполнена также .в одном корпусе и совмещенном исполнении, при котором в одном магнитопроводе действуют два магнитных поля а ротор коротко эгилкнут.
В устройстве формирование сигнал соответствуннцего моменту и определяемого магнитным полем маишны, осуществляется путем линейных операций с токами ротора и статора и напряжения статора,ВБМДП вргицающий момент определяется результирующим действием двух магнитных полей, которые в об- в щем случае при разном числе пар п олюсов машин, без которых состоит ) вращаются с разной частотой относительно неподвижной системы координат.
Кроме того, в известном устройстве использ потся датчики мгновенных значений фазных токов ротора с последуюш1 м их преобразованием. В случае использования БМДП непосредственное измерение токов ротора связано со значительными трудностями и снижает эффект применения БМДП.
Целью изобретения является упрощение и расширение функциональных возможностей устройства.
Это достигается тем, что в устройство для управления электрической машиной переменного тока, подключенной к преобразователю частоты, содержащее датчик углового положения ротора электрической машины, датчики токов и напряжения статора, датчик частоты сети, выходы которых соединены со входами первого преобразователя координат, формирователь момента, входы которого соединены с выходами первого преобразователя координату регулятор скорости с первым элементом сравнения, входы которого соединены с задатчиком скорости и датчиком скорости электрической машины, регулятор момента со вторым элементом сравнения, входы которого соединены с выходом регулятора скорости и выходом формирователя момента, регулятор реактивной -мощности с третьим элементом сравнения, входы которого соединены с задатчиком реактиной мощности и выходом формирователя сигнала реактивной мощности, второй преобразователь координат, входы.которого соединены с выходом регулятора момента, выходом регулятора реактивной мощности и выходами первого преобразователя координат, а выход второго преобразователя подключен ко входу преобразователя частоты с непосредственной связью, введены датчик тока второго статора электрической машины, формирователь проекций тока второго статора и формирователь проекций тока ротора электрической машины, а формирователь момента снабжен дополнительными входами, причем входы формирователя проекций тока второго статора электрической машины соединены с выходами датчика углового положения ротора и датчика тока второго электрической машины, входы формирователя проекций тока ротора соединены с выходами первого преобразователя координат, а выходы обоих формирова.телей проекций соединены с дополнительными входами формирователя момента.
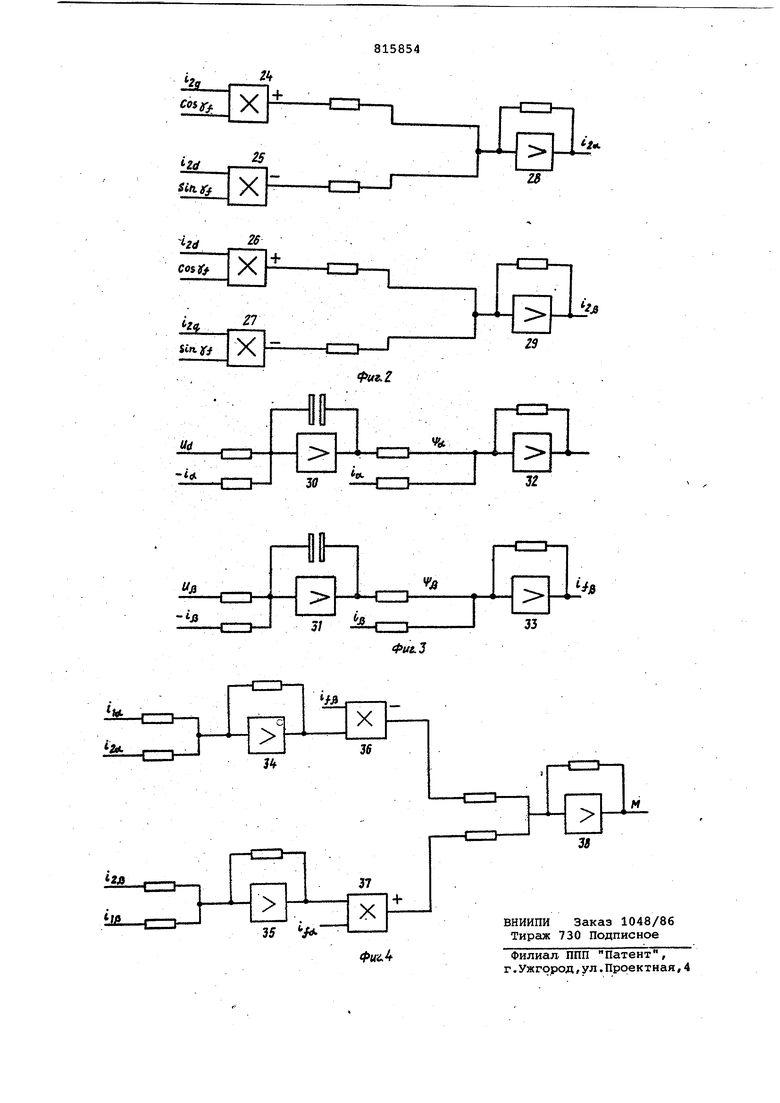
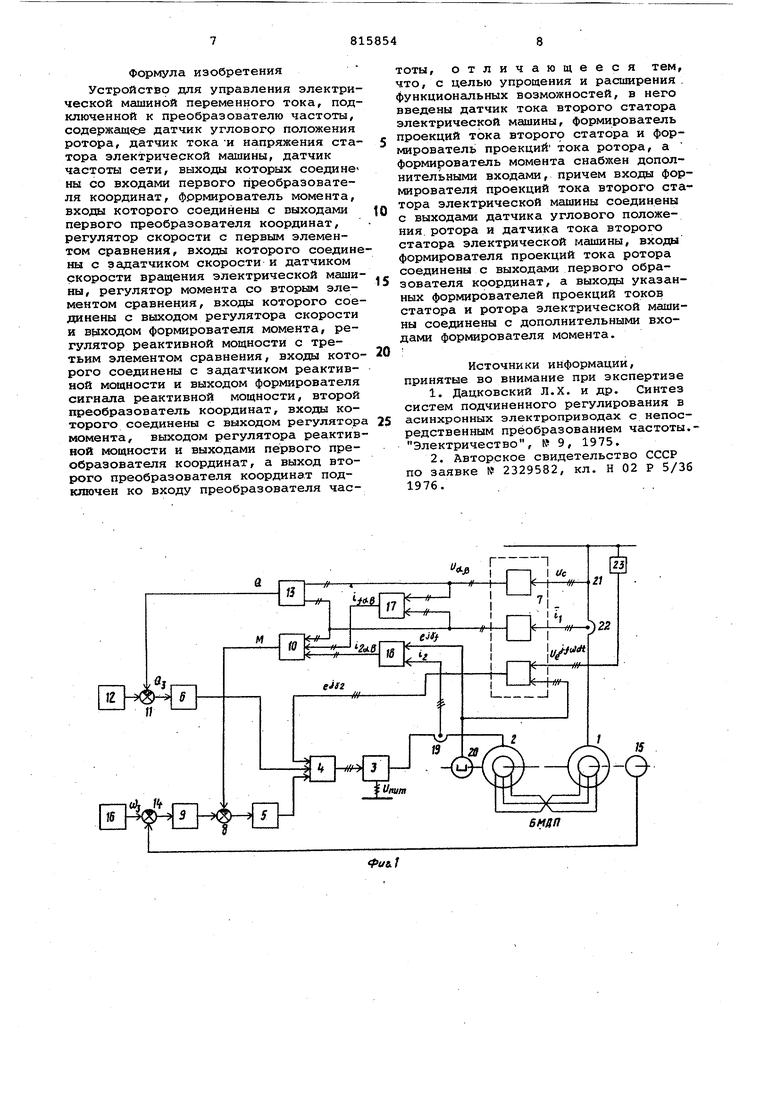
На фиг.1 изображена структурная схема устройства для управления бесконтактной электрической машиной двойного питания:, на фиг. 2-4 структурные схемы формирователя проеций тока второго стаТора, формирователя проекций тока ротора электрической машины и формирователя момента соответственно.
Первый статор 1 БМДП подключен к сети, второй статор 2 - к преобразователю 3 частоты с непосредственной связью. Управление преобразователем 3 частоты осуществляется напряжением со второго преобразователя 4 координат, ко входам которого под.ключены выходы регулятора 5 момента, регулятора 6 рактивной мощности и первого преобразователя 7 координат. Вход регулятора 5 момента через второй элемент 8 сравнения соединен с выходом регулятора 9 скорости и ВЫХОДСМ4 формирователя; 10 момента. Вход регулятора б реактивной мощности через третий элемент 11 сравнения соединен с задатчиком 12 реактивной мощности и формирователем 13 сигнала реактивной мощности. Вход регулятора 9 скорости через первый элемент 14 сравнения соединен с датчиком 15 скорости и задатчиком 16 скорости. Формирователь 13 сигнала реактивной мовдности соединен с выходами первого преобразователя 7 координат. Входы формирователя момента соединены с выходами формирователя 17 проекций тока ротора, формирователя 19 проек ций тока второго статора и перового преобразователя 7 координат. Входы формирователя 17 проекций тока рото ра соединены с выходами первого пре образователя координат 7. Входы фор мирователя 18 проекций тока второго статора соединены с выходами датчика 19 тока свторого статора 2 и датт чика 20 углового положения ротора. Входы первого преобразователя 7 координат соединены с выходами датчик 21 напряжения первого статора датчика 22 тока первого статора и датчика 23 частоты сети. Формирователь 18 проекций тока второго статора преобразует ток вто рого статора 2 в проекции на те же оси, в которых выражен ток первого статора .гр,+ р 3j-Vr Гг«,р, ге где истинное значение тока втор го статора 2 сигнал с углоизмерительной машины в случае равенства чисел пар полюсов р и р машины .ij-р .jjaoo di е . е Формирователь 18 проекций тока второго статора содержит четыре бло ка 24-27 умножения, входы которых соединены с выходами датчика 20 углового положения ротора и датчика 22 тока второго статора, а выходы попарно соединены со входами сумматоров 28 и 29, выходы которых соединены с двумя входами формировател 10 момента. Формирователь 17 проекций тока ротора осуществляет формирование проекций тока ротора в тех же осях что и токи статора 1 Чocp-7;D c г -W i - Vpl Формирователь 17 проекций тока ротора (фиг.3) содержит два интегр сумматора 30 и 31, входы которых соединены с соответствующими выхода ми первого преобразователя координа 7, а выходы соединены с соответству щими входами двух сумматоров 32 и 3 другие входы которых соединены с соответствующими входами формирователя 10 момента. Формирователь момента осуществляет выделение сигнала момента ,;,vci лг) или в составляющих по осям 4o6 ai;ip o,i.,2pV 4ji(,«.4Xa.2oL)Формирователь 10 момента (см. фиг.4) содержит два сумматора 34 и 35 входы которых соединены с соответствующими выходами первого преобразователя координат и формирователя 8 проекций тока второго статора. Выходы csTMMaTopoB 34 и 35 соединены с соответ ствукщими входами двух блоков умножения 36 и 37, два других входа этих блоков умножения соединены с выходами ф(ф шр6вателя 17 .проекций тока ротора, выходы блоков,умножения соединены со входом суг матора 38, выход которого соединен со вторым элементом 8 сравнения регулятора 5 момента . Устройство для управления БМДП работает следующим образ сан. Сигнгш задания по скорости сравнивается на элементе 14 сравнения с сигналом истинного значения скорости с датчика 15, рассогласование отрабатывается регулятором 9 скорости, и полученный сигнал является заданием по моменту. Этот сигнал сравнивается на втором элементе 8 сравнегия с истинным значением момента маишны, получаемым от формирователя 10 момента. Рассогласование отрабатывается регулятором 5 момента и результирующий сигнал поступает на второй преобразователь координат 4. В другом канале сигнал задания ito реактивной мощности сравнивается на третьем элементе 11 сравнения с истинным значением реактивной мощности, получаемым от формирователя 13 сигнгша реактивной мощности, результируюсщй сигнал отрабатывается регулятором 6 реактивной мощности. Выходной сигнал с регулятора б поступает на вход второго rtpeoбpaзoвaтeля 4 координат. Трехфазный выходной сигнал со второго преобразователя 4 координат пос-. тупает на вход преобразователя 3 частоты. Напряжение с выхода преобразователя 3 частоты, изменяющееся по частоте и амплитуде в зависимости от управления, подводится к обмоткам второгс. статора 2. Таким образом, введение новых блоков в устройство управления позволяет использовать его для управления электрическими машинами, работающими в более жестких условиях, и упростить его схему, обеспечивая качественное управление БМДП с высокой точностью.
Формула изобретения
Устройст:во для управления электрической машиной переменного тока, подключенной к преобразователю частоты, содерлсащ«Ее датчик углового положения ротора, датчик тока -и напряжения статора электрической машины, датчик частоты сети/ выходы которых соедине ны со входами первого преобразователя координат, формирователь момента, входы которого соединены с выходами первого преобразователя координат, регулятор скорости с первым элементом сравнения, входы которого соединены с задатчиком скорости и датчиком скорости вращения электрической машины, регулятор момента со вторым элементом сравнения, входы которого соединены с выходом регулятора скорости и в{лходом формирователя момента, регулятор реактивной мощности с третьим элементом сравнения, входы которого соединены с задатчиком реактивной мощности и выходом формирователя сигнала реактивной мощности, второй преобразователь координат, входы которого соединены с выходом регулятора момента, выходом регулятора реактивной мощности и выходами первого преобразователя координат, а выход второго преобразователя координат подключен ко входу преобразователя частоты, отличающееся тем, что, с целью упрощения и расширения функциональных возможностей, в него введены датчик тока второго статора электрической машины, формирователь проекций тока второго статора и формирователь проекций тока ротора, а формирователь момента снабжен дополнительными входами, причем входы формирователи проекций тока второго статора электрической машины соединены с выходами датчика углового положения ротора и датчика тока второго статора электрической машины, входы формирователя проекций тока ротора соединены с выходами первого образователя координат, а выходы указанных формирователей проекций токов статора и ротора электрической машины соединены с дополнительными входами формирователя момента.
Источники информации, принятые во внимание при экспертизе
1.Дацковский Л.Х. и др. Синтез систем подчиненного регулирования в асинхронных электроприводах с непосредственным преобразованием частоты Электричество, 9, 1975.
2.Авторское свидетельство СССР по заявке № 2329582, кл. Н 02 Р 5/3 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бесконтактной асинхронизированной синхронной машиной | 1989 |
|
SU1721787A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1985 |
|
SU1288885A1 |
| Устройство для управления машиной двойного питания | 1984 |
|
SU1356172A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| Устройство для управления асинхронизированной синхронной машиной | 1984 |
|
SU1314429A1 |