5 3 М 1
If.
JJ
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль робота | 1990 |
|
SU1722809A1 |
| Поворотное устройство | 1991 |
|
SU1810683A1 |
| УСТРОЙСТВО ПЕРИОДИЧЕСКОГО ПЕРЕМЕЩЕНИЯ | 2003 |
|
RU2254975C1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Привод прерывистого вращения | 1988 |
|
SU1663282A1 |
| РЕКУПЕРАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2117836C1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| РЕКУПЕРАТОР АВТОМОБИЛЯ | 2007 |
|
RU2346196C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2009 |
|
RU2409763C2 |
| МАГНИТОПРУЖИННЫЙ ПРИВОД | 2006 |
|
RU2312781C1 |
Изобретение относится к машинострое- нию.а именно к оборудованию для перемещения изделий и грузов с позиции на позицию, и может быть использовано при создании роботов, грейферных перекладчиков, манипуляторов. Целью изобретения является повышение надежности за счет уменьшения нагрузки на звенья. Перемещение выходного звена 2 модуля осуществляется от привода 6 и аккумулятора механической энергии, включающего две обгонные муфты, имеющие встречное направление свободного хода, каждая из которых через свою муфту сцепления в зависимости от направления перемещения выходного звена имеет возможность сцепляться с валом 8, связанным с выходным звеном, для передачи ему или отбора от него механической энергии на пружины 22, 23. 1 з.п. ф-лы, 3 ил.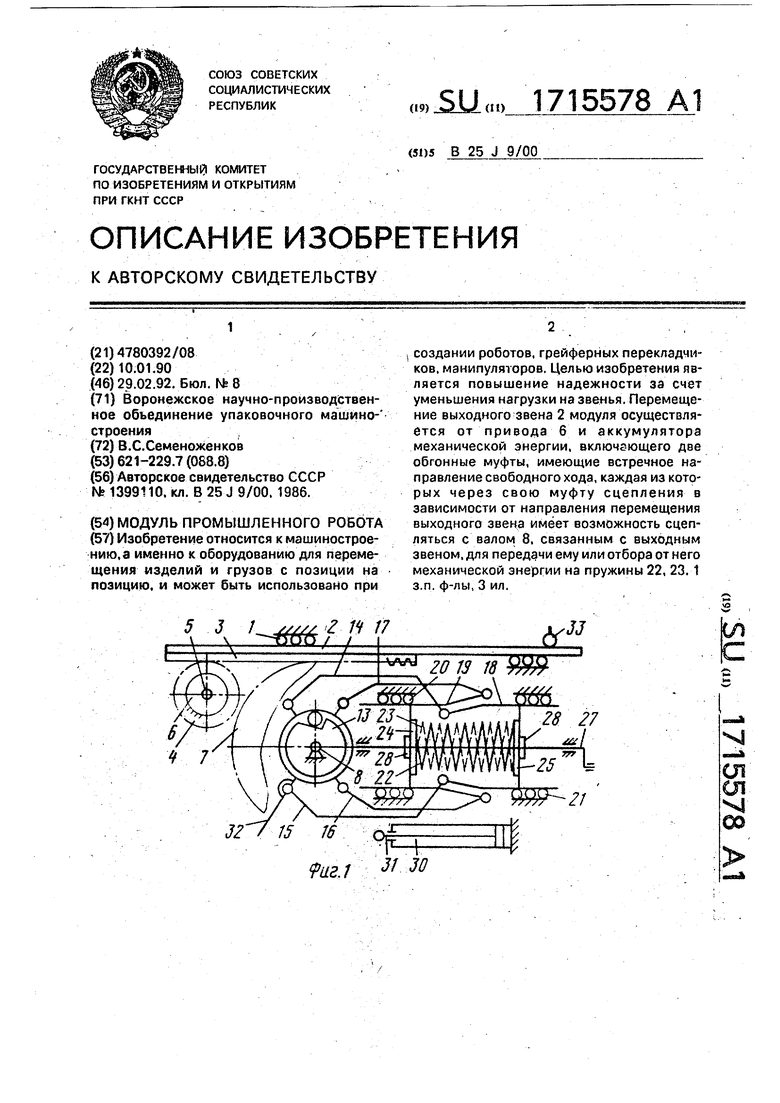
g89.
N
от сл
Ы
со
Изобретение относится к машиностроению, а именно к оборудованию для перемещения изделий и грузов с позиции на позицию, и может быть использовано при создании роботов, грейферных перекладчиков, манипуляторов.
Известны модули промышленных роботов, в которых перемещение выходных звеньев с позиции на позицию осуществляется с помощью гидравлических, пневматических или электрических двигателей.
Недостатками таких, модулей являются низкий уровень производительности, значительные динамические нагрузки и вибрации, сопровождающие работу робота. Причиной динамических нагрузок и вибрации, снижающих надежность оборудования, является то, что кинематическая энергия подвижных звеньев при торможении расходуется на деформирование и изнашивание деталей.
Наиболее близким по технической сущности к предлагаемому является модуль промышленного робота, содержащий стойку с направляющими, в которых размещено выходное звено, датчик положения выход-, ного звена относительно стойки, привод, систему управления, чаккумулятор механи-. ческой энергии, выполненный в виде размещенного на основании кривошипного вала, с управляемым фиксатором его положения, причем этот вал подпружинен по углу поворота относительно стойки и кинематически связан через дополнительно введенную управляемую сцепную муфту с выходным звеном..
Недостатком этой конструкции является то, что в начальный момент движения выходного звена, когда усилие пружины максимально, плечо действия ее усилия минимально. Поэтому разгон осуществляется относительно медленно.-Для обеспечения быстродействия перемещения выходного звена в этом случае необходимо использовать пружину повышенной жесткости, что приводит к усилению на гружен ност.и звеньев модуля. Высокий уровень нагрузок и их циклический характерявляются источником динамики и колебаний конструкции при работе, что ведет к снижению.надежности модуля промышленного робота. Кроме того, сложность выполнения фиксации кривошипного вала ввиду трудности обеспечения его неподвижности в момент попадания фиксатора в отверстие, особенно при высокой производительности, также ведет к снижению надежности модуля промышленного робота. 8 модуле время разгона и торможения выходного звена в основном зависит от жесткости пружины и массы подвижных звеньев. В случае значительного уменьшения этой массы (например, схват руки освободился от перемещений заготовки) резко уменьшается время разгона, что сопровождается значительным ростом скорости
и ускорения и ударным характером взаимодействия звеньев. Все это также приводит к увеличению динамики и вибрации в работе оборудования, а следовательно, к снижению надежности его работы,
0 Цель изобретения-повышение надежности модуля промышленного робота.
Указанная цель достигается тем, что модуль промышленного робота, содержащий стойку с направляющими, в которых разме5 щено выходное звено модуля, датчик положения выходного звена относительно стойки, привод, аккумулятор механической энергии и систему управления, включает в составе аккумулятора механической энер0 гии укрепленный на стойке вал с двумя установленными на подшипниках муфтами свободного хода, имеющими взаимно противоположное направление свободного хода, и двумя управляемыми сцепными
5 муфтами с возможностью взаимодействия их с обгонными муфтами, два подвижных звена, подпружиненных друг к другу с помощью пружины, причем каждое подвижное звено кинематически связано с
0 наружными обоймами обгонных муфт, а вал кинематически связан с выходным звеном модуля. Кроме того, аккумулятор механической энергии содержит по крайней мере одну дополнительную пружину. При этом
5 каждая пружина снабжена фиксатором состояния, выполненным в виде двух опорных шайб, жестко связанных с концами пружины, и соосно с пружиной расположен кронштейн с укрепленными на нем уп0 равляемыми упорами с возможностью взаимодействия последних с опорными шайбами.
Предлагаемая взаимосвязь звеньев обеспечивает рациональное направление
5 действия усилия пружины, а также практически постоянное его плечо и, тем самым, интенсивный разгон всех подвижных звеньев модуля робота, что позволяет устанавливать в конструкцию модуля пружины с
0 меньшей жесткостью, чем о прототипе, И снизить нагруженность деталей устройства. Наличие в конструкции установленных на подшипниках двух обгонных муфт, соединяемых с валом посредством управляе5 мых сцепных муфт, позволяет надежно и эффективно фиксировать пружину и вал практически на любом уровне производительности.
Выполнение аккумулятора .механической энергии в виде двух подпружиненных
друг к другу подвижных звеньев приводит к замыканию основных нагрузок на эти звенья, уменьшению их действия на стойку и значительному снижению ее колебаний при осуществлении перемещений с боль- шой частотой и, тем самым, повышению надежности работы оборудования.
Включение в конструкцию аккумулято- ра механической энергии по крайней мере одной дополнительной пружины с фикеато- ром ее состояния позволяет обеспечить примерно одинаковую динамику перемещений выходного звена модуля при различной массе переносимых грузов и ycTpaHflef возможность ударных нагрузок в конструкции при значительном уменьшении массы перемещаемого груза, что также повышает на дежность устройства.
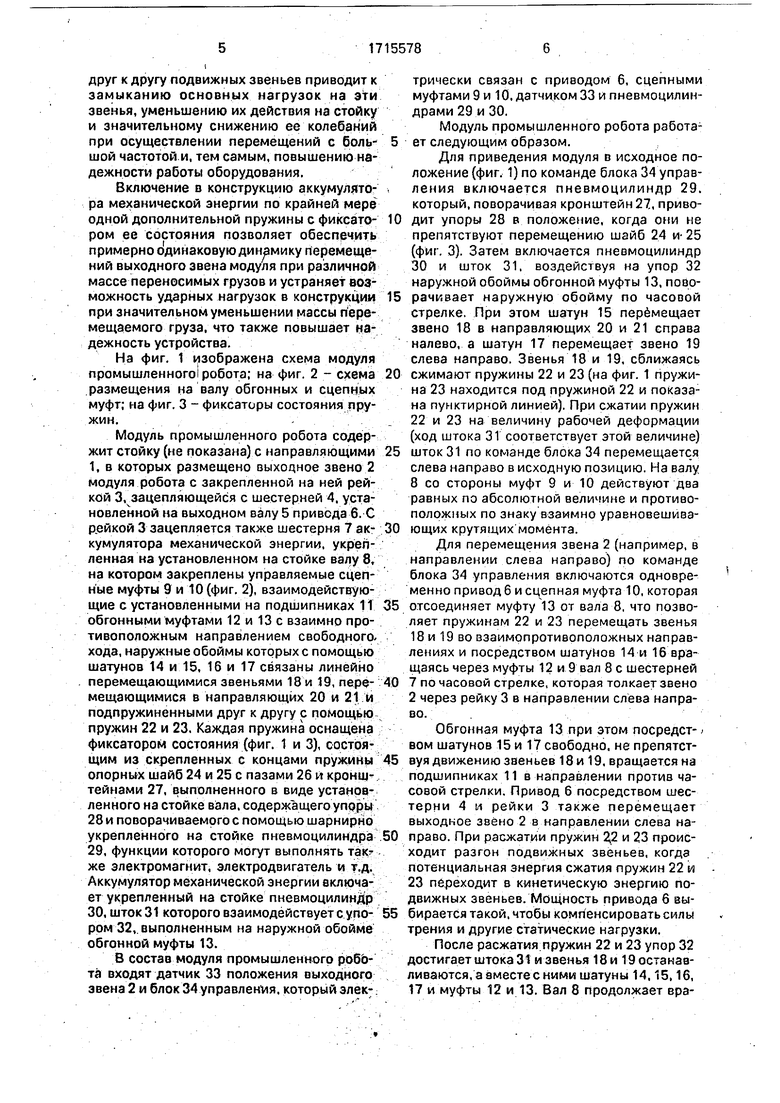
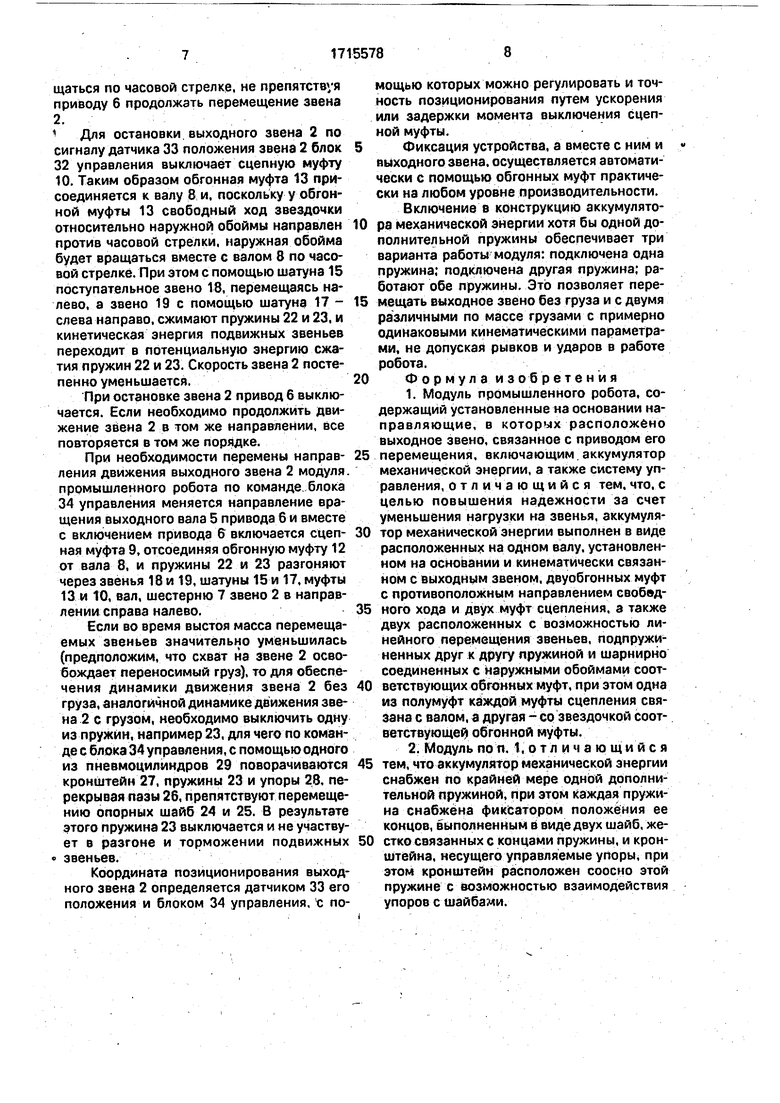
На фиг. 1 изображена схема модуля промышленного робота; на фиг. 2 - схема размещения на валу обгонных и сцепных муфт; на фиг. 3 - фиксаторы состояния пружин.
Модуль промышленного робота содержит стойку (не показана) с направляющими 1, в которых размещено выходное звено 2 модуля робота с закрепленной на ней рейкой 3, зацепляющейся с шестерней 4. установленной на выходном валу 5 привода 6. О р.ейкой 3 зацепляется также шестерня 7 ак- кумулятора механической энергии, укрепленная на установленном на стойке валу 8, на котором закреплены управляемые сцепные муфты 9 и 10 (фиг. 2), взаимодействующие с установленными на подшипниках 11 обгонными муфтами 12 и 13 с взаимно противоположным направлением свободного, хода, наружные обоймы которых с помощью шатунов 14 и 15, 16 и 17 связаны линейно перемещающимися звеньями 18 и 19, пере- мещающимися в направляющих 20 и 21 и подпружиненными друг к другу с помощью пружин 22 и 23. Каждая пружина оснащена фиксатором состояния (фиг. 1 и 3), состоящим из скрепленных с концами пружины опорных шайб 24 и 25 с пазами 26 и кронщ- теинами 27, выполненного в виде установленного на стойке вала, содержащего упрры 28 и поворачиваемого с помощью шарнирно укрепленного на стойке пневмоцилиндра
29,функции которого могут выполнять так же электромагнит, электродвигатель и т.д. Аккумулятор механической энергии включает укрепленный на стойке пневмоцилинд р
30,шток 31 которого взаимодействуете упо- ром 32, выполненным на наружной обойме обгонной муфты 13.
В состав модуля промышленного робота входят датчик 33 положения выходного звена 2 и блок34 управления, который электрически связан с приводом 6, сцепными муфтами 9 и 10. датчиком 33 и пневмоцилин- драми 29 и 30.
Модуль промышленного робота работает следующим образом.; ;
Для приведения модуля в исходное положение (фиг, 1) по команде блока 34 управления включается пневмоцилиндр 29. который, поворачивая кронштейн 27, приводит упоры 28 в положение, когда они не препятствуют перемещению шайб 24 и- 25 (фиг. 3). Затем включается пневмоцилиндр 30 и шток 31, воздействуя на упор 32 наружной обоймы обгонной муфты 13, поворачивает наружную обойму по часовой стрелке. При этом шатун 15 перемещает звено 18 в направляющих 20 и 21 справа налево, а шатун 17 перемещает звено 19 слева направо. Звенья 18 и 19, сближаясь сжимают пружины 22 и 23 (на фиг. 1 пружина 23 находится под пружиной 22 и показана пунктирной линией). При сжатии пружин
22и 23 на величину рабочей деформации (ход штока 31 соответствует этой величине) шток 31 по команде блока 34 перемещается слева направо в исходную позицию. На валу 8 со стороны муфт 9 и 10 действуют два равных по абсолютной величине и противоположных по знаку взаимно уравновешивающих крутящих момёнта.
Для перемещения звена 2 (например, в направлении слева направо) по команде блока 34 управления включаются одновременно привод 6 и сцепная муфта 10, которая отсоединяет муфту 13 от вала 8, что позволяет пружинам 22 и 23 перемещать звенья 18 и 19 во ззаимопротивоположных направлениях и посредством шатунов 14 и 16 вращаясь через муфты 12 и 9 вал 8 с шестерней 7 почасовой стрелке, которая толкает звено 2 через рейку 3 в направлении слева направо.
Обгонная муфта 13 при этом посредст- вом шатунов 15 и 17 свободно, не препятствуя движению звеньев 18 и 19, вращается на подшипниках 11 в направлении против часовой стрелки. Привод 6 посредством шестерни 4 и рейки 3 также перемещает выходное звено 2 в направлении слева направо. При расжатии пружин Я,2 и 23 происходит разгон подвижных звеньев, когда потенциальная энергия сжатия пружин 22 и
23переходит в кинетическую энергию подвижных звеньев. Мощность привода 6 выбирается такой, чтобы компенсировать силы трения и другие статические нагрузки.
После расжатия пружин 22 и 23 упор 32 достигает штока 31 и звенья 18 и 19 останавливаются, а вместе с ними шатуны 14,15,16, 17 и муфты 12 и 13. Вал 8 продолжает вращаться по часовой стрелке, не препятствуя приводу 6 продолжать перемещение эвена
Для остановки выходного звена 2 по сигналу датчика 33 положения звена 2 блок 32 управления выключает сцепную муфту 10. Таким образом обгонная муфта 13 присоединяется к валу 8 и, поскольку у обгонной муфты 13 свободный ход звездочки относительно наружной обоймы направлен против часовой стрелки, наружная обойма будет вращаться вместе с валом 8 по часовой стрелке. При зтом с помощью шатуна 15 поступательное звено 18, перемещаясь налево, а звено 19 с помощью шатуна 17 - слева направо, сжимают пружины 22 и 23, и кинетическая энергия подвижных звеньев переходит в потенциальную энергию сжатия пружин 22 и 23. Скорость звена 2 постепенно уменьшается.
При остановке звена 2 привод 6 выключается. Если необходимо продолжить движение звена 2 в том же направлении, все повторяется в том же порядке.
При необходимости перемены направления движения выходного звена 2 модуля, промышленного робота по команде блока 34 управления меняется направление вращения выходного вала 5 привода 6 и вместе с включением привода 6 включается сцепная муфта 9, отсоединяя обгонную муфту 12 от вала 8, и пружины 22 и 23 разгоняют через звенья 18 и 19, шатуны 15 и 17, муфты 13 и 10, вал, шестерню 7 звено 2 в направлении справа налево.
Если во время выстоя масса перемещаемых звеньев значительно уменьшилась (предположим, что схват на звене 2 освобождает переносимый груз), то для обеспечения динамики движения звена 2 без груза, аналогичной динамике движения звена 2 с грузом, необходимо выключить одну из пружин, например 23, для чего по команде с блока 34 управления, с помощью одного из пневмоцилиндров 29 поворачиваются кронштейн 27, пружины 23 и упоры 28. перекрывая пазы 26, препятствуют перемещению Опорных шайб 24 и 25. В результате этого пружина 23 выключается и не участвует в разгоне и торможении подвижных звеньев.
Координата позиционирования выходного звена 2 определяется датчиком 33 его положения и блоком 34 управления, с помощью которых можно регулировать и точность позиционирования путем ускорения или задержки момента выключения сцепной муфты.
Фиксация устройства, а вместе с ним и выходного звена, осуществляется автоматически с помощью обгонных муфт практически на любом уровне производительности. Включение в конструкцию аккумулятора механической энергии хотя бы одной дополнительной пружины обеспечивает три варианта работы модуля: подключена одна пружина; подключена другая пружина; работают обе пружины. Это позволяет перемещать выходное звено без груза и с двумя различными по массе грузами с примерно одинаковыми кинематическими параметрами, не допуская рывков и ударов в работе робота.
Формула изобретен и я
перемещения, включающим аккумулятор механической энергии, а также систему управления, о т л и ч а ю щ и и с я тем, что, с целью повышения надежности за счет уменьшения нагрузки на звенья, аккумулятор механической энергии выполнен в виде расположенных на одном валу, установленном на основании и кинематически связанном с выходным звеном, двуобгонных муфт с противоположным направлением свободкого хода и двух муфт сцепления, а также двух расположенных с возможностью линейного перемещения звеньев, подпружиненных друг к другу пружиной и шарнирно соединенных с Наружными обоймами соответствующих обгонных муфт, при этом одна из полумуфт каждой муфты сцепления связана с валом, а другая - со звездочкой соответствующей обгонкой муфты.
снабжен по крайней мере одной дополнительной пружиной, при этом каждая пружина снабжена фиксатором положения ее концов, выполненным в виде двух шайб, же- стко связанных с концами пружины, и кронштейна, несущего управляемые упоры, при этом кронштейн расположен соосно этой пружине с возможностью взаимодействия упоров с шайбами.
| Модуль промышленного робота | 1986 |
|
SU1399110A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
