Объект вибрирования
ном режиме дистанционное съемное кольцо 7, установленное между корпусом (К) 1-й потребителем, выдвигается вверх. Трехпо- зиционный распределитель 16, установленный в трубопроводе 13 подвода энергоносителя, переключается в положение У - виброударный режим, и открывает подвод энергоносителя в аккумулирующую полость (АП) 3. Как только давление в АП 3 повышается до давления настройки клапана-пульсатора 15, размещенного между рабочей полостью (РП) 2 и АП 3, происходит соединение этих двух полостей и одновременное отсоединение его от слива. Сжатый энергоноситель, устремляясь из АП 3 в РП 2 отдает свою энергию поршню (П)5, расположенному между двумя полостями и связанному с потребителем, который наносит удар по поверхности объекта вибрирования и под действием пружины 4 возвращается в исходное положение. В случае работы виброробота в автоколебательном режиме дистанционное съемное кольцо 7 возвращается в исходное положение, а трехпозиццонный распределитель 16 переключается в.левое положение по ходу энергоносителя. Под действием энергоносителя поршень 9 со штоком 10 перемещается К 1 до упора П 5 в поверхность объекта вибрирования, в АП 3 повышается давление до давления настройки клапана-пульсатора 15. Далее процесс происходит аналогично предыдущему. Различие заключается в том, что П 5 не ударяет по поверхности объекта вибрирования, а толкает его. 1 ил.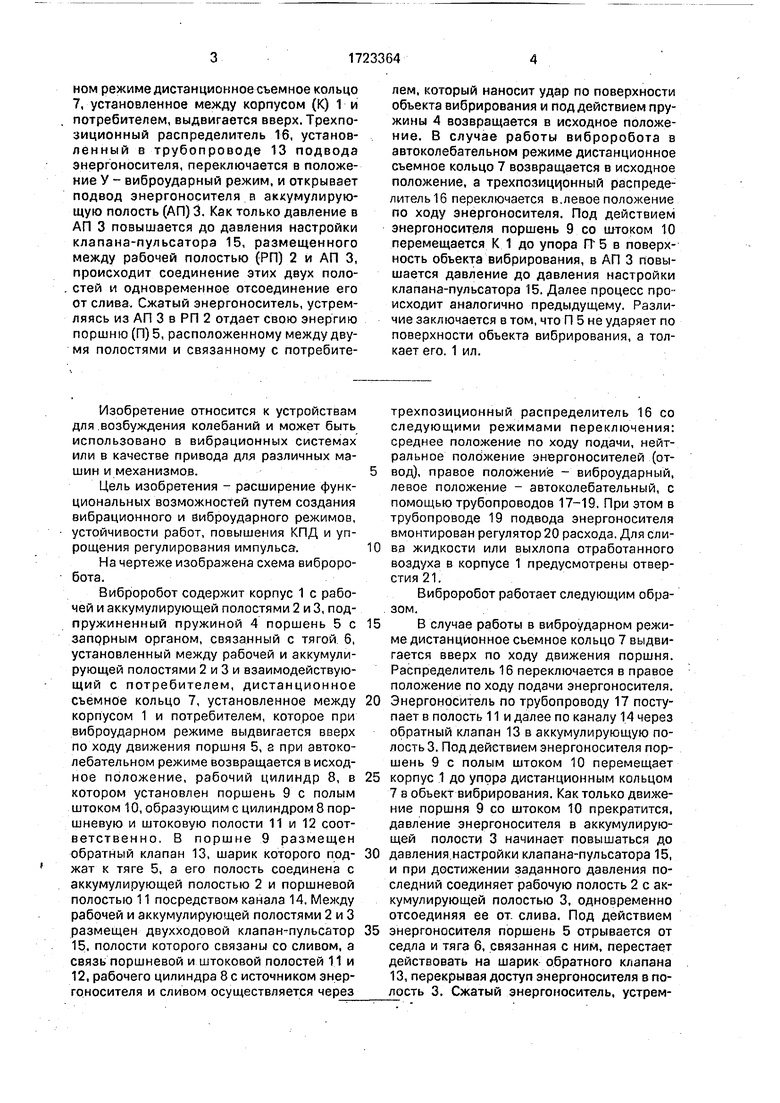
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм прессования машины для литья под давлением | 1974 |
|
SU486860A1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2409446C1 |
| Гидроклиновое устройство | 1989 |
|
SU1670120A1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВИЛИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2574623C1 |
| СПОСОБ МНОГОСТУПЕНЧАТОГО ВЗВОДА, РАЗГОНА, УДАРА И УСТАНОВКА УДАРНОГО ДЕЙСТВИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ ПРИ РАЗРУШЕНИИ ГОРНЫХ ПОРОД | 2006 |
|
RU2325527C2 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
| Автоколебательный вибровозбудитель | 1990 |
|
SU1787572A1 |
| Устройство для формования | 1984 |
|
SU1230840A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 1998 |
|
RU2147681C1 |
| Гидромолот | 1978 |
|
SU802457A1 |
Изобретение относится к устройствам для возбуждения колебаний и может быть использовано в вибрационных системах или в качестве привода для различных машин и механизмов. Целью изобретения является расширение функциональных возможностей путем создания вибрационного и виброударного режимов, устойчивости работы, повышения КПД и упрощения регулирования импульса. В случае работы в виброудар
Изобретение относится к устройствам для .возбуждения колебаний и может быть использовано в вибрационных системах или в качестве привода для различных машин и механизмов.
Цель изобретения - расширение функциональных возможностей путем создания вибрационного и аиброударного режимов, устойчивости работ, повышения КПД и упрощения регулирования импульса.
На чертеже изображена схема виброробота.
Виброробот содержит корпус 1 с рабочей и аккумулирующей полостями 2 и 3, под- пружиненный пружиной 4 поршень 5 с запорным органом, связанный с тягой. 6, установленный между рабочей и аккумулирующей полостями 2 и 3 и взаимодействующий с потребителем, дистанционное съемное кольцо 7, установленное между корпусом 1 и потребителем, которое при виброударном режиме выдвигается вверх по ходу движения поршня 5, а при автоколебательном режиме возвращается в исходное положение, рабочий цилиндр 8, в котором установлен поршень 9 с полым штоком 10, образующим с цилиндром 8 поршневую и штоковую полости 11 и 12 соответственно. В поршне 9 размещен обратный клапан 13, шарик которого поджат к тяге 5, а его полость соединена с аккумулирующей полостью 2 и поршневой полостью 11 посредством канала 14. Между рабочей и аккумулирующей полостями 2 и 3 размещен двухходовой клапан- пульсатор 15. полости которого связаны со сливом, а связь поршневой и штоковой полостей 11 и 12, рабочего цилиндра 8 с источником энергоносителя и сливом осуществляется через
трехпозиционный распределитель 16 со следующими режимами переключения: среднее положение по ходу подачи, нейтральное полбжение энергоносителей (отвод), правое положение - виброударный, левое положение - автоколебательный, с помощью трубопроводов 17-19. При этом в трубопроводе 19 подвода энергоносителя вмонтирован регулятор 20 расхода. Для слива жидкости или выхлопа отработанного воздуха в корпусе 1 предусмотрены отверстия 21.
Виброробот работает следующим обра- . зом.
В случае работы в виброударном режиме дистанционное съемное кольцо 7 выдвигается вверх по ходу движения поршня. Распределитель 16 переключается в правое положение по ходу подачи энергоносителя,
Энергоноситель по трубопроводу 17 поступает в полость 11 и далее по каналу 14 через обратный клапан 13 в аккумулирующую полость 3. Под действием энергоносителя поршень 9 с полым штоком 10 перемещает
корпус 1 до упора дистанционным кольцом 7 в объект вибрирования. Как только движение поршня 9 со штоком 10 прекратится, давление энергоносителя в аккумулирующей полости 3 начинает повышаться до
давления.настройки клапана-пульсатора 15, и при достижении заданного давления последний соединяет рабочую полость 2 с аккумулирующей полостью 3, одновременно отсоединяя ее от. слива. Под действием
энергоносителя поршень 5 отрывается от седла и тяга 6, связанная с ним, перестает действовать на шарик обратного клапана 13, перекрывая доступ энергоносителя в полость 3. Сжатый энергоноситель, устремл яясь из полости 3 в полость 2, отдает свою энергию поршню 5, который наносит удар по поверхности объекта вибрирования. При прохождении поршнем 5 отверстий 20 энергоноситель идет на слив, что влечет за собой падение давления до давления слива и под действием пружины 4 возвращение поршня 5 в исходное положение. Клапан-пульсатор 15 закрывается, а обратный клапан 13 открывается, соединяя аккумулирующую по- лость 3 с энергоносителем; цикл повторяется.
Для работы виброробота в автоколебательном режиме дистанционное съемное кольцо 7 необходимо возвратить в исходное положение, а распределитель 16 переключить в левое положение А. В этом случае полости 11 и 12 с помощью трубопроводов 17 и 18 соединены с трубопроводом 19. Под действием энергоносителя поршень 9 со штоком 10 перемещает корпус 1 до упора поршня 5 в поверхность объекта вибрирования. Как только движение поршня 9 со штоком 10 прекратится, давление в аккумулирующей полости 3 начинает новы- шаться до давления настройки клапана- пульсатора 15.
Далее процесс происходит аналогично описанному, за исключением того, что поршень 5 не ударяет по поверхности объекта вибрирования, а толкает его, В этом случае перемещение получает не только объект вибрирования, но и корпус 1 с поршнем 9 и штоком 10, т.е. происходит взаимоотталкивание, и возврат поршня 5 осуществляется
сжатием энергоносителя в штоковой полости 12.
Формула изобретения виброробот, содержащий корпус с.рабочей и аккумулирующей полостями, поршень с запорным органом, установленный в рабочей полости и взаимодействующий с потребителем, и тягу, закреп пенную на запорном органе поршня, установленном между аккумулирующей и рабочей полостями, и взаимодействующую с клапаном, связывающим аккумулирующую полость с источником энергоносителя, о т л и ч а ю щ и- й с я тем, что, с целью расширения функциональных возможностей путем создания вибрационного и виброударного режимов, устойчивости работы, повышения КПД и упрощения регулирования импульса, виброробот снабжен дистанционным съемным кольцом, установленным между корпусом и потребителем, рабочим цилиндром, в котором установлен поршень с полым штоком, образующим с цилиндром поршневую и штоковую полости, трехпоэиционным распределителем, связывающим поршневую и штоковую полости рабочего цилиндра с источником потребителя и сливом, и двухпози- ционным клапаном-пульсатором, полости которого связаны с рабочей и аккумулирующей полостями и сливом, при этом шток поршня жестко закреплен на корпусе, его полость связана с аккумулирующей и поршневой полостями, а клапан установлен в полости штока.
| Вибратор | 1988 |
|
SU1624216A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
