Изобретение относится к медицин10
15
30
кой технике, точнее к протезироваию и протезостроению, и может быть спользовано для протезирования инвалидов с расщепленными культями предплечья с достаточной подвижностью учевой бранши,,
Цель изобретения - исключение компенсаторных движений путём умень- шения усилий и повышения точности отработки бесконтактных управляющих движений лучевой бранши„
На фиг. 1 приведена функциональная блок-схема системы управления протезом; на фиго 2 -протез общий вид
Протез содержит искусственную кисть 1 с электроприводом 2 схвата- раскрытия пальцев 3 и рычажной сиете- мой 4, присоединенную к гильзе 5 пред плечья, связанную с приемной гильзой 6,, в которой размещена локтевая бранша Т,. В гильзе 5 предплечья закреплен кронштейн 8, на котором посредством втулки 9 шарнирно установлен рычаг 10 5 лучевой бранши 11 с элементом ее захва- )та в виде кольца 12, а также размеще- 1на система 13 управления, состоящая из датчиков схватя и раскрытия пальцев 3, выполненных в виде одноименных оптронов 14 и 15, например, типа АОД111А с отражающими пластинами 16 и 17, закрепленными на рычаге 10 про-: ,тив оптронов 14 и 15, зафиксированных внутри гильзы предплечья 5 на стой (ке 18 о В систему 13 управления также входят последовательно присоединенные к управляющим элементам 19-и 20 оптронов 14 и 15 через делители 21 и 22 балансный усилитель 23, например, типа К140УД12, выходы которого через соответствующие импульсные преобразователи 24 и 25, выполненные в виде мультивибраторов, соединены с входами мостового усилителя 26 мощности, в диагональ которого включен электропривод 2 схвата раскрытия пальцев 3 искусственной кисти 1„ Питание системы 13 управления и электропривод да 2 осуществляется от источника 27 питания через кабель 28 и микропереключатели схвата 29 и раскрытия 30, подключенные к шинам питания (не пока-; замы) оптронов 14 и 15, соответствен- но..Контакты 31 и 32 микропереключателей 29 и 30, закрепленных внутри гильзы 5 предплечья посредством элементов 33 фиксации, соединены с пружиной 34, закрепленной на рычаге 10.
-20
35
40
45
50
10
15
30
,, . 5 - ;
Отражающие пластины 16 и 17 перемещаются относительно оптронов 14 и 15 движением рычага 10 с кольцом 1.2 с помощью лучевой бранши 11, подвижной относительно локтевой бранши 7, зафиксированной ложементом 35 в приемной гильзе 6, являющейся продолжением гильзы 5 предплечья«
Протез работает следующим образом При включении источника 27 питания вся система 13 управления остается отключенной, рычаг 10 находится в среднем нейтральном положении. При нажатии лучевой бравшей 11, входящей в кольцо 12, на рычаг 10 последний поворачивается во втулке 9 и пружиной 34 включается один из микропереключателей 29 и 30, при этом запиты- 20 вается один из оптронов 14 или 15 и система 13 управления Отражающая пластина 16 или 17 перемещается в сторону включённого соответственно оптрона 14 или 15 и изменяет его внутреннее сопротивление„ Полученный изменяющийся сигнал передается на один из входов балансного усилителя 23, а затем - на один из импульсных преобразователей 24 или 25, где преобразуется в импульсный сигнал, поступающий в усилитель 26 мощности, а затем - на электропривод 2 схва- та-раскрытия пальцев 3 искусственной кисти 1, приводя ее пальцы 3 в движение Рычажный механизм 4 искусственной кисти 1 реализует схват или раскрытие пальцев 3 При дальнейшем перемещении рычага 10 отражающая пластина. 16 и 17 приближается к окну (не показано) соответствующего опт- рону 14 или 15, сигнал увеличивается и скорость перемещения пальцев 3 искусственной кисти 1 возрастает. При возвращении рычага 10 в исходное положение, а с ним и соответствующей отражающей пластины 16 или 17, движение пальцев 3 прекращается. Один из работавших микропереключателей 29 и 30 отключает питание системы 13 управления и соответственно электропривода 2 искусственной кисти 1 При движении лучевой бранши 11 в другом направлении пружиной 34 рычага 1-0 включается другой переключа- тель 29 или 30 и оптрон 14 илн/15. Система 13 управления отрабатывает сигнал, управляющий противоположным движением пальцев 3 со скоростью, пропорциональной перемещению сскг
35
40
45
50
ветсчвукщей отражающей пластины 16 и 17. После выполнения движения и возврата рычага 10 в исходное положение , включающий микропереключатель 29 или 30 отключает источник 27 питания Система 13 управления позволяет осуществить одну пару движений с пропорциональным управлением скоростью их выполнения,,
Описанный протез позволяет инвалиду, используя приобретенные навыки движение лучевой 11 и локтевой 7 браншами расщепленной культи предплечья 36 по Крукенбергу, производить пропорциональное бесконтактное управление движениями схвата и раскрытия искусственной кисти 1 и за счет повышения точности этого управления, обусловленной приложением минимальных управляющих усилий лучевой браншей 11 значительно уменьшают ся компенсаторные движения, которые бывает вынужден выполнять инвалид при управлении протезом данного ти- па. При этом также исключается .влияние внешних электромагнитных полей на поступающий управляющий сигнал-, а значит,, устраняются искажение сигнала и возможные ошибки в выполнении движений протезом, что повышает на - дежность его работы Отключение питания после выполнения движений позволяет меныпить общее энергопотребт ление протеза, не ухудшая его xapax-v теристик
Формула изобретения
Протез предплечья на культю по Крукенбергу, содержащий искусственную кисть, соединенную с гильзой предплечья и приемной гильзой, в которых шарнирно установлен рычаг лучевой бравшие элементом ее захвата и за,креплен ложемент локтевой бранши, а также размещена система управления с датчиками схвата и раскрытия пальцев и последовательно соединенными балансным усилителем, импульсными
преобразователями и усилителем мощности, к выходу которого подключен электропривод схвата-раскрытия пальцев, о т л и ч а ю щ и и с я тем,
что, целью исключения компенсаторных
движений путем уменьшения усилий и повышения точности отработки бесконтактных управляющих движений лучевой бранши, в него введены .пружина и два микропереключателя, закрепленные соответственно на рычаге лучевой бранши и в гильзе предплечья, а датчики схвата и раскрытия пальцев выполнены в виде одноименных оптронов с отражающими пластинами, зафиксированными
на рычаге лучевой бранши, подключенных к входам балансного усилителя, при этом контакты микропереключателей кинематически связаны с пружиной и соединены с оптронами.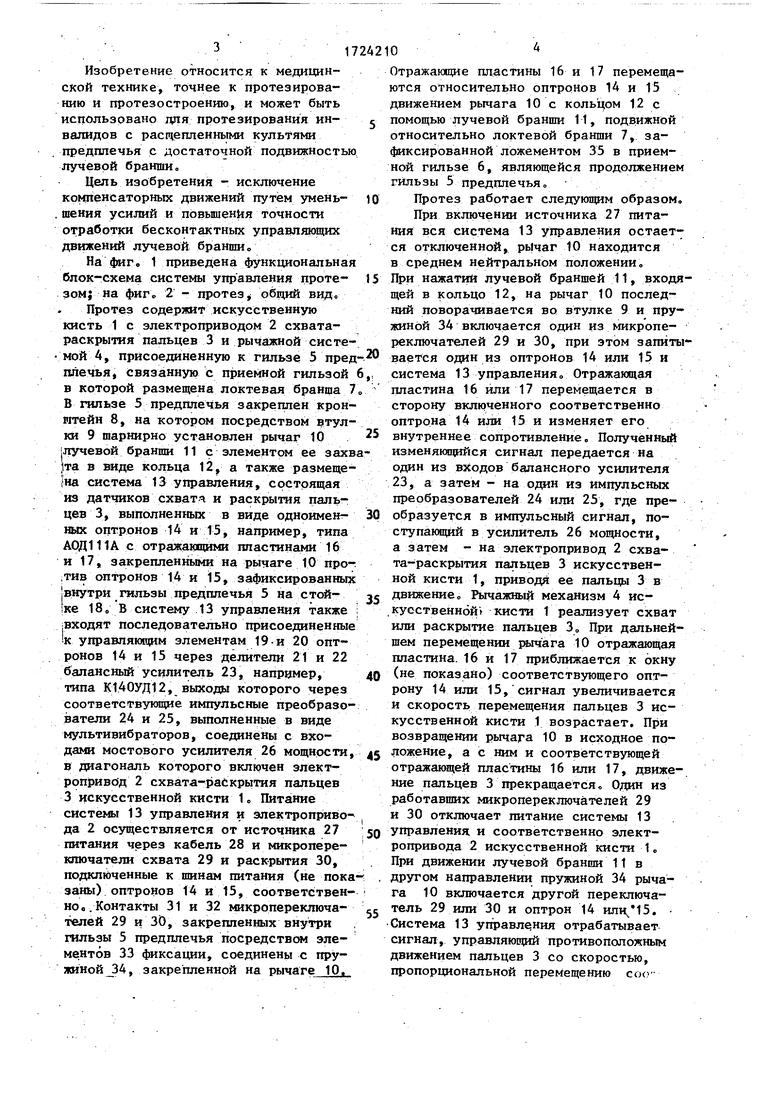
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья на расщепленную культю | 1988 |
|
SU1724209A1 |
| Протез предплечья на расщепленную культю | 1988 |
|
SU1563692A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| Протез верхней конечности | 1988 |
|
SU1627172A1 |
| Протез плеча | 1989 |
|
SU1732967A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Протез руки | 1974 |
|
SU506410A1 |
Протез предплечья на расщеплен- ную культю относится к медицинской технике, точнее к протезированию и протезо строениюо Цель изобретения исключение компенсаторных движений инвалида путем уменьшения усилий и повышения точности отработки бесконтактных управляющих движений лучевой бранши. Протез включает искусственную кисть 1, гильзу предплечья и приемную гильзу 6, шарнирно установленный в лервой рычаг 10 лучевой бранши It, оптроны схвата 14 и раскрытия 15 пальцев 3, закрепленные в гильзе 5 предплечья с отражающими пластинами 16 и 17, закрепленными на рычаге 10, балансный усилитель, импульсные преобразователи и усилитель мощности, последовательно подключенные к оптронам 14 и 15„ К усилителю мощности подключен электропривод 2 схвата-раскрытия пальцев 3„ На рычаге 10 лучевой бранши 11 закреплена пружина 34, связанная с контактами двух микропереключателей 29, 30, закрепленных в гильзе 5 предплечья элементами 33 фиксации Контакты микропереключателей 29, 30 соединены с соответствующими оптро- нами 14 и 15 с источником питания и системой 13 управления, 2 ил. i. (Л
| Протез предплечья на расщепленную культю | 1988 |
|
SU1662548A1 |
