1
Изобретение относится к области протезирования и протезостроения, а именно к протезам верхних конечностей.
Известен протез руки, содержащий гильзы плеча и предплечья, микропереключатели, локтевую тягу с пороговым элементом, электроприводы механизма кисти и разгрузочного механизма, в виде двух электродвигателей с редукторами и самотормозящимися винтовыми передачами. Однако размещение электропривода механизма кисти в дистальной части приводит к нерациональному распределению масс, увеличению требуемых моментов инвалида, а наличие двух электроприводов ухудщает весовые характеристики протеза.
С целью снижения мыщечпых энерготрат инвалида при управлении и уменьшения веса и габаритов протеза электропривод выполнен в виде электродвигателя с дифференциалом и размещен в корпусе с наружными зубцами, установленном в гильзе плеча на оси вращения, две выходные щестерни дифференциала кинематически связаны с самотормозящимися БИНТОВЫМИ передачами, а на корпусе закреплена подпружиненная собачка с пальцевой тягой, находящаяся в зацеплении с выходной шестерней дифференциала, связанной с винтовой передачей механизма кисти.
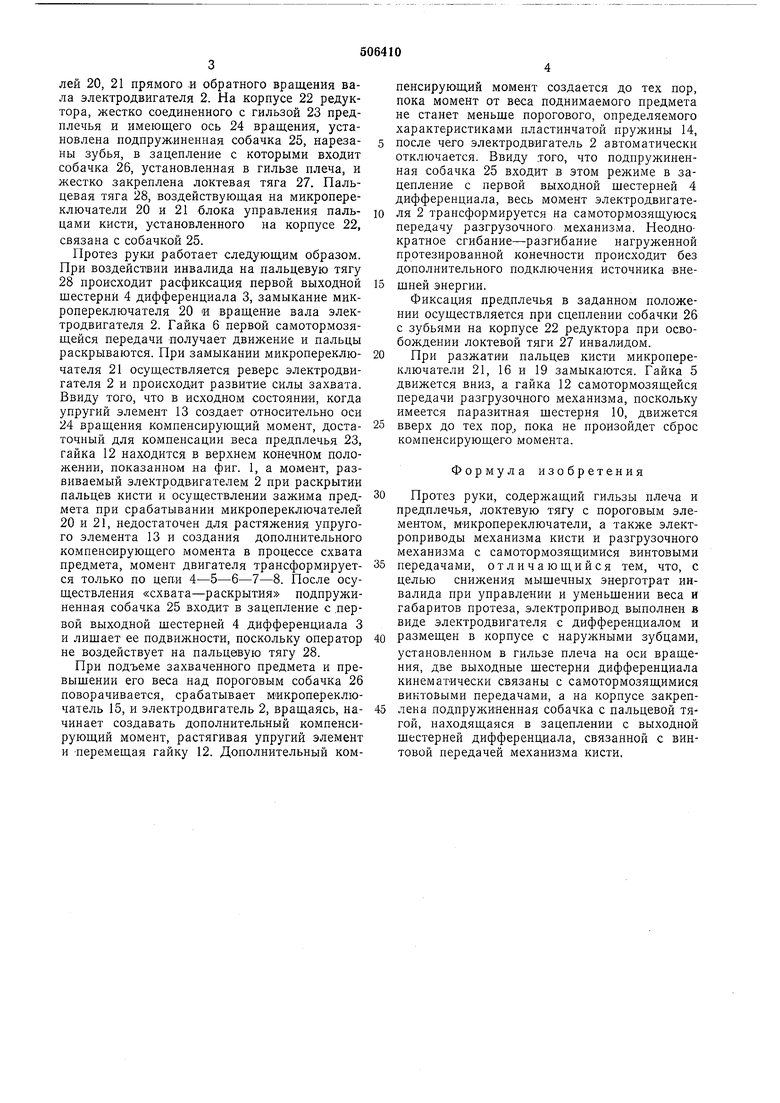
На фиг. 1 изображена кинематическая схема предлагаемого протеза руки; на фиг. 2 -
вид по стрелке А на фиг. 1; на фиг. 3 - сечение по Б-Б на фиг. 1.
Протез руки содержит гильзу 1 плеча, в отверстиях вилки которой устанавливают один
электродвигатель 2 с редуктором, выполненным в виде дифференциала 3. Первая выходная щестерня 4 дифференциала 3 входит в зацепление с винтом 5 первой самотормозящейся передачи винт 5-гайка 6, гайка которой
через жесткую тягу 7 соединена с пальцами 8. Вторая выходная щестерня 9 дифференциала 3 через паразитную щестерню 10 входит в зацепление с винтом 11 самотормозящейся передачи винт 11-гайка 12 разгрузочного механизма, гайка которой соединена с одним концом упругого элемента 13 разгрузочного механизма, а его другой конец закреплен на вилке гильзы 1 плеча. Блок управления разгрузочным механизмом состоит из механического порогового элемента, выполненного, например, в виде пластинчатой пружины 14, и микропереключателей 15, 16 прямого и обратного вращения вала электродвигателя 2, последовательно соединенных с микропереключателями 17 и 18 крайних положений гайки 12 самотормозящейся передачи разгрузочного механизма л микропереключателем 19, установленным в пальцах кисти протеза. Кроме того, имеется блок управления пальцами
кисти, состоящий из двух микропереключателей 20, 21 прямого ,и обратного вращения вала электродвигателя 2. На корпусе 22 редуктора, жестко соединенного с гильзой 23 предплечья и имеющего ось 24 вращения, установлена подпруж.иненная собачка 25, нарезаны зубья, в зацепление с которыми входит собачка 26, установленная в гильзе плеча, и жестко закреплена локтевая тяга 27. Пальцевая тяга 28, воздействующая на микропереключатели 20 и 21 блока управления пальцами кисти, установленного на корпусе 22, связана с собачкой 25.
Протез руки работает следующим образом. При воздействии инвалида на пальцевую тягу 28 происходит расфиксация первой выходной щестернИ 4 дифференциала 3, замыкание микропереключателя 20 и вращение вала электродвигателя 2. Гайка 6 первой самотормозящейся передачи получает движение и пальцы раскрываются. При замыкании микропереключателя 21 осуществляется реверс электродвигателя 2 и происходит развитие силы захвата. Ввиду того, что в исходном состоянии, когда упругий элемент 13 создает относительно оси 24 вращения компенсирующий момент, достаточный для компенсации веса предплечья 23, гайка 12 находится в верхнем конечном положении, показанном на фиг. 1, а момент, развиваемый электродвигателем 2 при раскрытии пальцев кисти и осуществлении зажима предмета при срабатывании микропереключателей 20 и 21, недостаточен для растяжения упругого элемента 13 и создания дополнительного компенсирующего момента в процессе схвата предмета, момент двигателя трансформируется только по цепи 4-5-6-7-8. После осуществления «схвата-раскрытия подпружиненная собачка 25 входит в зацепление с .первой выходной шестерней 4 дифференциала 3 и лищает ее подвижности, поскольку оператор не воздействует на пальцевую тягу 28.
При подъеме захваченного предмета и превышении его веса над пороговым собачка 26 поворачивается, срабатывает микропереключатель 15, и электродвигатель 2, вращаясь, начинает создавать дополнительный компенсирующий момент, растягивая упругий элемент и -перемещая гайку 12. Дополнительный компенсирующий момент создается до тех пор, пока момент от веса поднимаемого предмета не станет меньше порогового, определяемого характеристиками пластинчатой пружины 14,
после чего электродвигатель 2 автоматически отключается. Ввиду того, что подпружиненная собачка 25 входит в этом режиме в зацепление с первой выходной шестерней 4 дифференциала, весь момент электродвигателя 2 трансформируется на самотормозящуюся передачу разгрузочного механизма. Пеоднократное сгибание-разгибание нагруженной протезированной конечности происходит без дополнительного подключения источника внещней энергии.
Фиксация предплечья в заданном положении осуществляется при сцеплении собачки 26 с зубьями на корпусе 22 редуктора при освобождении локтевой тяги 27 инвалидом.
При разжатии пальцев кисти микропереключатели 21, 16 и 19 замыкаются. Гайка 5 движется вниз, а гайка 12 самотормозящейся передачи разгрузочного механизма, поскольку имеется паразитная шестерня 10, движется
вверх до тех пор, пока не произойдет сброс компенсирующего момента.
Формула изобретения
Протез руки, содержащий гильзы плеча и предплечья, локтевую тягу с пороговым элементом, микропереключатели, а также электроприводы механизма кисти и разгрузочного механизма с самотормозящимися винтовыми
передачами, отличающийся тем, что, с целью снижения мышечных энерготрат инвалида при управлении и уменьшении веса и габаритов протеза, электропривод выполнен в виде электродвигателя с дифференциалом и
размеп,ен в корпусе с наружными зубцами,
установленном в гильзе плеча на оси вращения, две выходные шестерни дифференциала кинематически связаны с самотормозящимися винтовыми передачами, а на корпусе закреплена подпружиненная собачка с пальцевой тягой, находящаяся в зацеплении с выходной шестерней дифференциала, связанной с винтовой передачей механизма кисти.
/lA/c .1|
, I
26
,иг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез плеча | 1989 |
|
SU1732967A1 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Привод протеза при вычленении плеча | 1975 |
|
SU548273A1 |
| Протез плеча с биоэлектрическим управлением | 1976 |
|
SU604557A1 |
| Искусственная механическая рука | 1945 |
|
SU67476A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |

