зуном 23 и каркасом. Во время работы производят фиксацию рамы 2 якорем 20 относительно кровли и опорной поверхности выработки с помощью приводных ГЦ 24 и 25. Это обеспечивает шахтному самоходному манипулятору создание значительных напорных усилий. В результате он м.б. использован для удаления ранее установленной крепи, перегрузки породной массы. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перекрепления горных выработок | 1985 |
|
SU1259021A1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| Устройство для перекрепления горных выработок | 1983 |
|
SU1086172A1 |
| Шахтный самоходный манипулятор | 1983 |
|
SU1204739A1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2184846C2 |
| Стволовая буропогрузочная машина | 1982 |
|
SU1078078A1 |
Изобретение относится к средствам механизации и автоматизации в горном деле. Цель - повышение эффективности работы. Шахтный самоходный манипулятор имеет раму 2. Внутри рамы 2 установлена каретка 7 с поворотной колонной 10. С последней связана грузоподъемная стрела 12с блоком 13 поворотных гидродвигателей на конце. К раме 2 жестко крепится якорь 20. Он выполнен с охватывающим каркас ползуном 23, поршнем 22 и приводными гидроцилиндрами (ГЦ) 24,25. Один из приводных ГЦ размещен в каркасе и соединен с поршнем 22. Последний установлен в нижней части каркаса. Другие приводные ГЦ связаны с пол
Изобретение относится к средствам механизации и автоматизации ряда операций при проведении и перекреплении горных выработок.
Известен шахтный самоходный манипулятор, который содержит дистанционно управляемую ходовую тележку, манипуляторы основной и дополнительный, захваты для монтажных элементов, поворотную головку с телевизионной камерой и аппаратуру управления 1,
Недостатком известного устройства является загромождение выработки, что исключает возможность совмещения его работы с другим технологическим оборудованием, например рельсовым транспортом при перекреплении горных выработок.
В качестве прототипа выбрано устройство для перекрепления горных выработок, которое содержит механизм передвижки в виде одноколейной траковой гусеницы, стрелу-манипулятор с ковшом, смонтированную на поворотной колонке, захваты в виде гидроцилиндров и натяжного троеа и др. механизмы 2.
Существенными недостатками прототипа являются невозможность создания больших (порядка 4-6 т) усилий, необходимых для работы ковшом и, особенно, для выдергивания элементов старой крепи, задавленной породой, что объясняется закреплением машины за вновь установленную крепь, не успевшую нагрузиться давлением породных масс, и отсутствие возможности замены у стрелы-манипулятора рабочего оборудования, например, ковша на захват или гидроударник, что приводит к низкой эффективности использования оборудования.
Не решен вопрос и безопасной эксплуатации машины, т.е. обрыв троса захватного устройства или его поломка вызовет опрокидывание машины и, как следствие, травмирование оператора. Кроме этого, верхнее, по отношению к приводу вертикального перемещения, положение стрелы- манипулятора затрудняет работу с ковшом из-за возникающего вдавливающего ковша
в породу усилия (составляющая от наклонной напорной силы на стреле-манипуляторе).
Целью изобретения является повышение эффективности работы.
Указанная цель достигается за счет силового удержания рамы относительно кровли и опорной поверхности, а также за счет возможности установки на рабочем конце
стрелы, сменного оборудования, например, ковша, схвата, гидроударника. Для этого шахтный самоходный манипулятор снабжен якорем, каркас которого закреплен посредством кронштейнов на раме ходовой
тележки, при этом якорь выполнен с охватывающим каркас ползуном, штоком и приводными гидроцилиндрами, один из которых размещен в каркасе и соединен с поршнем, установленным в нижней части каркаса, а
другие приводные гидроцилиндры связаны с одной стороны с ползуном, а с другой - с каркасом, причем конец стрелы снабжен дополнительными поворотными гидродвигателями, с которыми соединена опора, с
возможностью поворота ее в вертикальной и горизонтальной плоскостях относительно продольной оси стрелы.
Сопоставительный анализ с прототипом показывает, что предлагаемый шахтный самоходный манипулятор отличается тем, что он снабжен якорем вышеописанной конструкции и дополнительными поворотными гидродвигателями, с которыми соединена опора для закрепления сменного оборудования.
Таким образом предлагаемый шахтный самоходный манипулятор соответствует критерию изобретения новизна. Сравнение предлагаемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них отличительных признаков, присущих предлагаемому решению, что позволяет сделать вывод о соответствии критерию существенные отличия.
На фиг. 1 представлен шахтный самоходный манипулятор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Шахтный самоходный манипулятор, ус- тановленный на опорную поверхность 1, включает раму 2, которая соединена с основным механизмом 3 передвижки, выполненным, например, в виде одноколейной траковой гусеницы 4с приводными осями, соединенными через кронштейны 5 с рамой 2. Внутри рамы 2 на рамках б установлена каретка 7, соединенная с гидроцилиндром 8 передвижки, шток 9 которого соединен с рамой 2. На каретке закреплена поворотная колонна 10 с приводом 11 поворота в горизонтальной плоскости, например, в виде поворотного гидродвигателя.
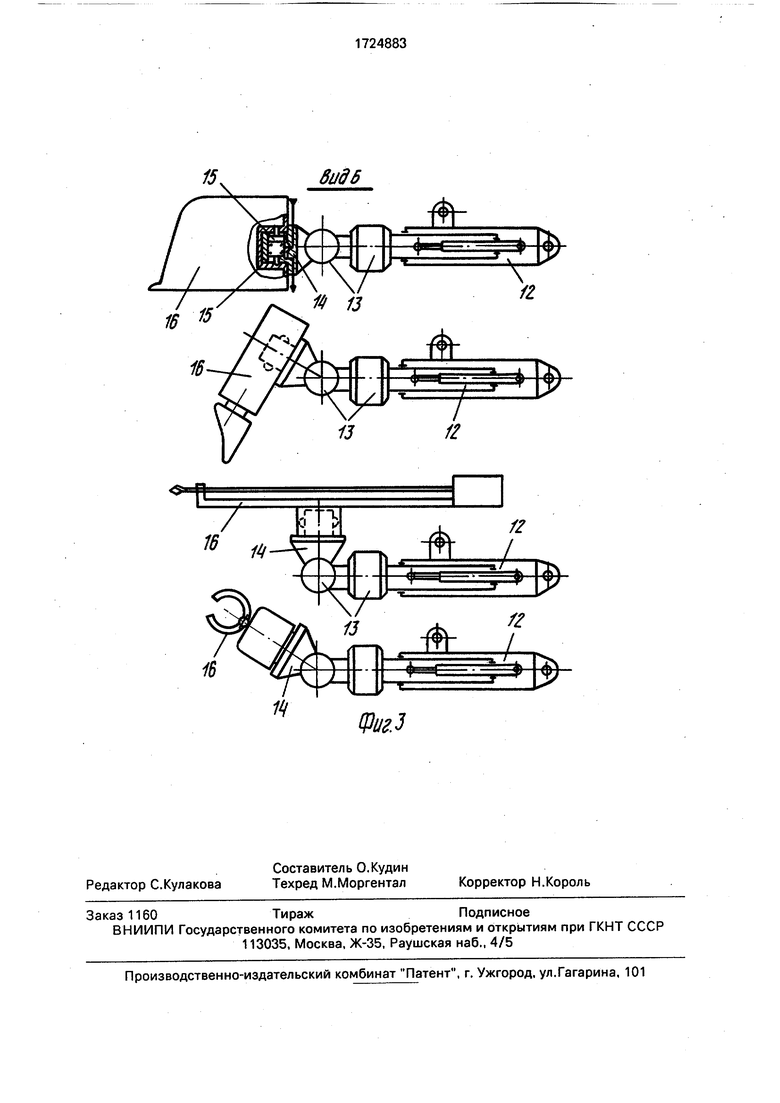
С нижней частью поворотной колонны 10 соединена грузоподъемная стрела 12, с рабочим концом выдвижной (с приводом от гидроцилиндра) частью которой соединен блок 13 (фиг. 3) из поворотных гидродвигателей.
Блок 13 опорой 14с фиксаторами-поршнями 15 соединяется со сменным обору- дованием 16, например ковшом.
Приводом поворота в вертикальной плоскости стрелы 12 является гидроцилиндр 17, установленный шарнирно в кронштейнах 18 поворотной колонны 10, шток которого соединен с указанной стрелой 12.
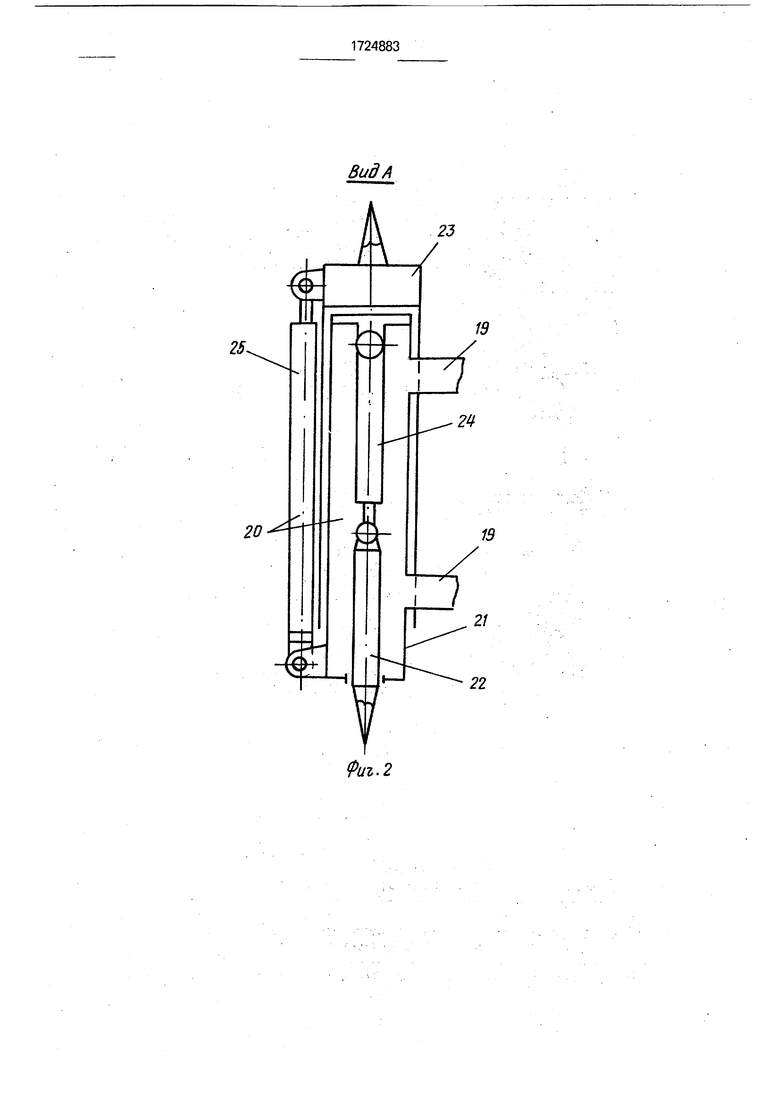
К раме 2 кронштейнами 19 жестко крепится якорь 20 (фиг. 2), который состоит из каркаса 21, поршня 22, ползуна 23 и приводных гидроцилиндров 24 и 25.
Поршень 22 и соединенный с ним гидроцилиндр 24 установлены внутри каркаса 21.
С каркасом 21 соединены корпуса двух приводных гидроцилиндров 25, штоки кото- рых соединены с ползуном 23.
Поршень 22 и ползун 23 выполнены с конусообразными зубьями. На раме 2 также закреплены захваты 24 за стойки крепи и ауттригер 26 (ауттригеры).
Каждый захват 24 выполнен в виде схва- та 27, имеющего возможность осевого и поперечного перемещений относительно рамы, например, с приводами от гидроцилиндров..
Ауттригер 26 шарнирно крепится одним концом к раме 2, а на другом его конце установлен опорный каток 28.
Привод 29 поворота ауттригера в вертикальной плоскости выполнен, например, в виде гидроцилиндра, шток которого соединен с ауттригером, а корпус - с рамой 2.
Дополнительно на фиг. 1 показаны следующие элементы:
30 и 31 - стойка и верхняк старой (задав- ленной) крепи;
32- вагонетка;
33- рельсовый путь;
34- насосная гидравлическая станция;
35- передающее устройство телевизионной установки;
36- сидение оператора.
Шахтный самоходный манипулятор работает следующим образом.
При помощи траковой гусеницы 4 шахтный самоходный манипулятор перемещают к месту перекрепления горной выработки. Устанавливают ауттригер 26 опорным катком 28 на опорную поверхность штрека, а затем прикрепляют раму 2 схватами 27 захватов 24 к стойкам крепи. Производят фиксацию рамы 2 манипулятора якорем 20 относительно кровли и опорной поверхности выработки путем вдавливания конусообразных зубьев поршня 22 и ползуна 23 посредством приводных гидроцилиндров 24 и 25, соответственно, в опорную поверхность и кровлю выработки.
Конусообразная форма облегчает внедрение зубьев в породную массу.
Затем, в зависимости от рода выполняемой работы, устанавливают соответствующее сменное оборудование 16 на опоре 14 блока 13 и стопорят его фиксаторами-поршнями 15 (фиг. 3). Например, после разработки породной массы, на опоре 14 устанавливают ковш, входящий в комплект сменного оборудования 16, и стопорят его фиксаторами-поршнями 15. Для создания напорного усилия на ковше используют гид- роцилйндр 8 передвижки, который перемещает каретку на роликах 6 с поворотной колонной 10, стрелой 12, блоком 13 и ковшом относительно рамы 2 шахтного манипулятора. При этом возникающая от напорной реактивная сила воспринимается якорем 20. После заполнения ковша породной массой, используя все имеющиеся приводы управления, разворачивают стрелу 12 и устанавливают ковш над вагонеткой, а затем производят его разгрузку в вагонетку. При этом управление самоходным манипулятором осуществляют дистанционно, например, в автоматическом режиме с использованием телевизионной установки, устройство 35 которой установление на стреле 12, а приемное устройство (на чертежах не показано) - на пульте управления.
Управление шахтным самоходным манипулятором можно осуществлять в ручном режиме управления, непосредственно с сидения 36 оператора.
После уборки породной массы осуществляют необходимую замену сменного оборудования, например ковша, на гидроударник.
Расфиксируют раму 2 от кровли и опорной поверхности штрека выработки путем
реверсирования подачи рабочей жидкости в приводные гидроцилиндры 24 и 25 якоря 20. При этом поршень 22 и ползун 23 втягиваются и якорь 20 занимает компактное транспортное положение. Затем расфиксируют раму 2 от схватов 27. Стрелу 12 располагают вдоль штрека. Опорный каток 28 ауттригера 26 располагают с небольшим зазором от опорной поверхности, исключая тем самым опрокидывание шахтного самоходного ма- нипулятора. Затем, посредством траковой гусеницы, осуществляют перемещение шахтного самоходного манипулятора на шаг ус- танавливаемой крепи, после чего выполняют вышеперечисленные работы по закреплению шахтного самоходного манипулятора в выработке и цикл работ повторяют.
С помощью предлагаемого шахтного самоходного манипулятора можно выполнить все необходимые работы, связанные с установкой крепи и перёкреплением выработок. Причем наличие у шахтного самоходного манипулятора якоря для фиксации рамы относительно кровли и опорной поверхности выработки обеспечивает ему возможность создания значительных напорных усилий (4-6 т), что исключено в прототипе, а это позволяет использовать шахтный самоходный манипулятор и для удаления старой крепи при перекреплении выработки, что расширяет функциональные возможности шахтного самоходного манипулятора.
Также за счет наличия якоря и ауттригера (0В) существенно повышается безопас- ность использования шахтного манипулятора в ручном режиме управления (с сидения оператора).
Нижнее, в отличие от прототипа, расположение грузоподъемной стрелы улучшает работу ковша, так как практически исключается заклинивающее (вдавливающее) ковш в опорную поверхность усилие при наполнении ковша породной массой (стрела при наполнении ковша располагается, практически, горизонтально).
Наличие блока ей сменным оборудованием существенно расширяет функциональные возможности шахтного манипулятора.
Формула из об р е т е н и я
Шахтный самоходный манипулятор, включающий грузоподъемную стрелу, установленную через механизм поворота в горизонтальной плоскости на раме ходовой тележки и имеющую механизм продольного перемещения, поворотные гидродвигатели и опору с фиксатором для сменного оборудования, отличающийся тем, что, с целью повышения эффективности работы, он снабжен якорем, каркас которого закреплен посредством кронштейнов на раме ходовой тележки, при этом, якорь выполнен с охватывающим каркас ползуном, поршнем и приводными гидроцилйндрами, один из которых размещен в каркасе и соединен с поршнем, установленным в нижней части каркаса, а другие приводные гидроцишнд- ры Связаны с одной стороны с ползуном, а с другой - с каркасом, причем конец стрелы снабжен дополнительными поворотными гидродвигателями, с которыми соединена опора, с возможностью поворота ее в вертикальной и горизонтальной плоскостях относительно продольной оси стрелы.
Риг. 2
ВидА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1321824A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шахтный самоходный манипулятор | 1983 |
|
SU1204739A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
