Изобретение относится к горной промышленности, в частности к шахтным манипуляторам, предназначенным для механизации ручных трудоемких работ преимущественно при проведении горных выработок.
Целью изобретения является повышение функциональных возможностей манипулятора при обеспечении транспортной развязки с технологическим оборудованием.
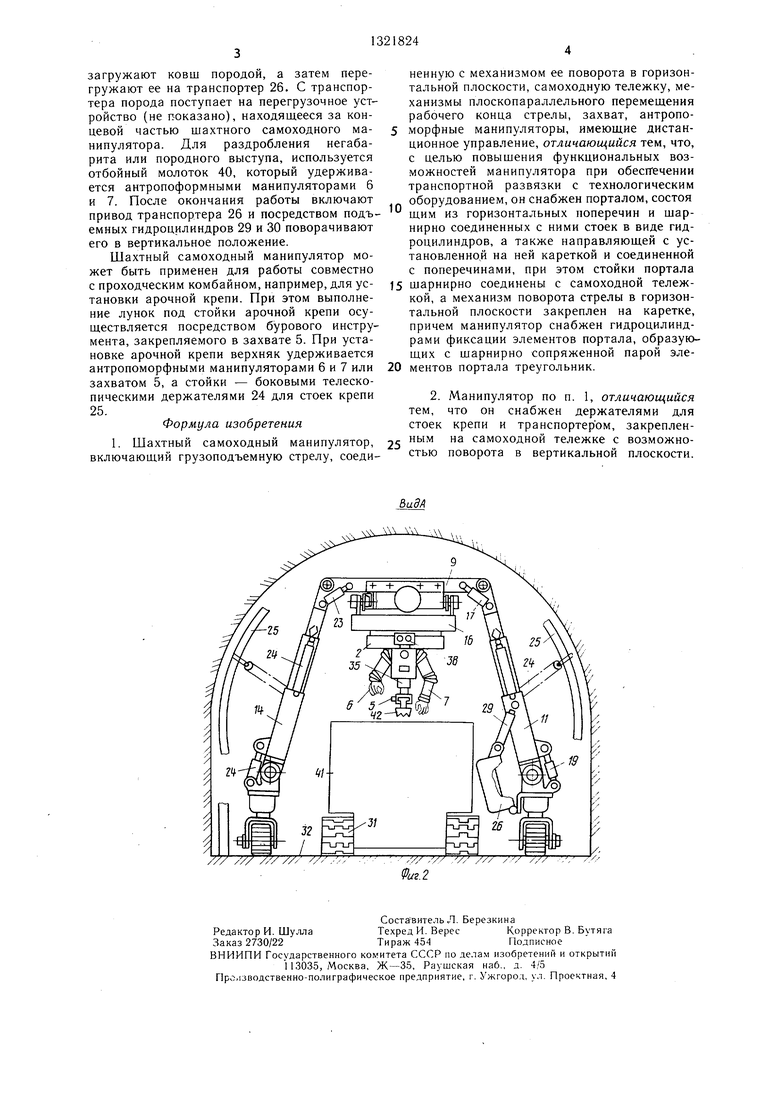
На фиг. 1 изображен шахтный самоходный манипулятор; на фиг. 2 - вид А на фиг. 1.
Шахтный самоходный манипулятор включает грузоподъемную стрелу 1, соединенную с механизмом 2 ее поворота в горизонтальной плоскости, самоходную тележку 3, механизмы 4 плоскопараллельного переме- ш,ения рабочего конца стрелы, захват 5, антропоморфные манипуляторы 6 и 7, портал 8, состояпдий из горизонтальных поперечин 9 и 10 и шарнирно соединенных с ними стоек в виде гидроцилиндров 11-14, а так- же направляющую 15 с установленной на -ней кареткой 16 и соединенной с поперечинами 9 и 10. При этом стойки 11 -14 портала шарнирно соединены с самоходной тележкой 3, а механизм 2 поворота стрелы в горизонтальной плоскости закреплен на каретке 16. Причем манипулятор снабжен гидроцилиндрами 17-23 фиксации элементов портала, образующих с шарнирно сопряженной парой элементов портала треугольник. Шахтный самоходный манипулятор снабжен также держателями 24 для стоек крепи 25 и транспортером 26, закрепленным на самоходной тележке 3 с возможностью поворота в вертикальной плоскости благодаря наличию шарнирных соединений 27 и 28 с одного борта и подъемных гидроцилиндров 29 и 30 с другого борта. Манипулятор имеет приводные колесные блоки 31 для передвижения по опорной поверхности 32.
В направляющей 15 установлены с возможностью качения приводные колеса 33 каретки 16 на которой через механизм 2 поворота установлена грузоподъемная стрела 1 с механизмом 4 плоскопараллельного перемещения ее рабочего конца, на котором закреплено U-образное основание 34, на котором размещен гидромотор с цапфой, соединенной с телескопическим рычагом 35, на конце которого закреплен захват 5 для сменного оборудования 36, например ковша. С внешней (передней) стороны основания 34 закреплен каркас 37 с антропоформными манипуляторами 6 и 7 и передающим устройством 38 стереотелевизионной установки.
С элементами 9-14 и 3 соединены дополнительные гидроцилиндры 17-23, каждый из которых образует при фиксации заданного положения портала с соответствующей парой шариирно сопряженных элементов жест кий треугольник.
К самоходной тележке 3 на шарнирных соединениях 27 и 28 прикреплен одним бортом транспортер 26 с возможностью по
5
5
0
0
5
0
5
0
ворота в вертикльнои плоскости от подъемных гидроцилиндров 29 и 30, соединяющих второй борт транспорта 26 с телескопическими гидроцилиндрами 11 и 12.
Кроме того, манипулятор включает фонарь 39, отбойный молоток 40, транспортное средство 41, например, породопогрузочную или буровую машину, сменную опору 42, движитель 43 приводного колесного блока.
Работу шахтного самоходного манипулятора рассмотрим на примере выполнения с его помощью операции по транспортной развязке с технологическим, оборудованием, например породопогрузочной мащи- ной, а также по перегрузке породы от забоя выработки за концевую часть устрой- ста.
Транспортная развязка с технологическим оборудованием осуществляется следующим образом.
Шахтный самоходный манипулятор подъезжает к технологическому оборудованию {или наоборот). В случае необходимости осуществляют изменение колеи его движения. Для .этого антропоморфными манипуляторами 6 и 7 устанавливается в захвате 5 сменная опора 42 (фиг. 2). Затем телескопический рычаг 35 разворачивается в нижнее положение. С помощью грузоподъемной стрелы 1 и телескопического рычага 35 опускается сменная опора 42 до упора в опорную поверхность 32 штрека. Затем фиксируются гидроцилиндрами 17-20 элементы 9-14 портала 8, после чего разворачиваются на 90° колеса самоходной тележки.
Управляя движителями 43 приводных колесных блоков 31, перекатывают тележку на необходимое в поперечном направлении расстояние так, чтобы выйти за габариты транспортного средства 41 При этом одновременно осуществляется выдвижка штоков телескопических гидроцилиндров 11 и 12. После этого фиксируются гидроцилиндрами 17- 20 указанные элементы портала 8. В случае необходимости аналогичную операцию производят с элементами другой стороны портала.
После выполнения указанных операций антропоморфными манипуляторами 6 и 7 снимают сменную опору 42 и укладывают ее в технологически предусмотренное место на портале. 8. Затем выполняют транспортную развязку с технологическим оборудованием 41 путем проезда над ним.
Шахтный самоходный манипулятор с применением транспортера 26 работает следующим образом.
Управляя подъемными гидроцилиндрами 29 и 30, опускают транспортер 26, поворачивая его относительно шарниров 27 и 28, в горизонтальное положение. Антропоформными манипуляторами 6 и 7 устанавливают ковш 36 в захвате 5. Включают привод транспортера 26. Осуществляя передвижение ujaxTHbiM самоходным манипулятором и управляя всеми необходимыми приводами,
загружают ковш породой, а затем перегружают ее на транспортер 26. С транспортера порода поступает на перегрузочное устройство (не показано), находящееся за концевой частью шахтного самоходного манипулятора. Для раздробления негабарита или породного выступа, используется отбойный молоток 40, который удерживается антропоформными манипуляторами 6 и 7. После окончания работы включают привод транспортера 26 и посредством подъемных гидроцилиндров 29 и 30 поворачивают его в вертикальное положение.
Шахтный самоходный манипулятор может быть применен для работы совместно с проходческим комбайном, например, для установки арочной крепи. При этом выполнение лунок под стойки арочной крепи осуществляется посредством бурового инструмента, закрепляемого в захвате 5. При установке арочной крепи верхняк удерживается антропоморфными манипуляторами 6 и 7 или захватом 5, а стойки - боковыми телескопическими держателями 24 для стоек крепи 25.
Формула изобретения
1. Шахтный самоходный манипулятор, включающий грузоподъемную стрелу, соеди0
ненную с механизмом ее поворота в горизонтальной плоскости, самоходную тележку, механизмы плоскопараллельного перемещения рабочего конца стрелы, захват, антропоморфные манипуляторы, имеющие дистанционное управление, отличающийся тем, что, с целью повышения функциональных возможностей манипулятора при обеспечении транспортной развязки с технологическим оборудованием, он снабжен порталом, состоя щим из горизонтальных поперечин и щар- нирно соединенных с ними стоек в виде гидроцилиндров, а также направляющей с установленной на ней кареткой и соединенной с поперечинами, при этом стойки портала
5 щарнирно соединены с самоходной тележкой, а механизм поворота стрелы в горизонтальной плоскости закреплен на каретке, причем манипулятор снабжен гидроцилиндрами фиксации элементов портала, образующих с шарнирно сопряженной парой эле0 ментов портала треугольник.
2. Манипулятор по п. 1, отличающийся тем, что он снабжен держателями для стоек крепи и транспортером, закреплен- ным на самоходной тележке с возможностью поворота в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный самоходный манипулятор | 1983 |
|
SU1204739A1 |
| Шахтный самоходный манипулятор | 1989 |
|
SU1724883A1 |
| Подвесной шахтный манипулятор | 1988 |
|
SU1580019A1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| Подвесной шахтный манипулятор | 1986 |
|
SU1461977A1 |
| УСТРОЙСТВО ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ ГЛУБОКОГО ЗАЛОЖЕНИЯ В СЛАБОУСТОЙЧИВЫХ ГРУНТАХ МЕТОДОМ ОПЕРЕЖАЮЩЕЙ КРЕПИ | 1996 |
|
RU2103513C1 |
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
| Колесный погрузчик-штабелер | 1969 |
|
SU454160A1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
Изобретение относится к горной промышленности и позволяет повысить функциональные возможности манипулятора при обеспечении транспортной развязки с технологическим оборудованием (ТО). Манипулятор включает грузоподъемную стрелу 1, соединенную с механизмом 2 ее поворота в горизонтальной плоскости, механизмы 4 плоскопараллельного перемещения рабочего конца стрелы,захват 5,антропоморфные манипуляторы 7 и 6 с дистанционным управлением, самоходную тележку (Т) 3 и держатели стоек крепи. Механизм 2 закреплен на каретке 16, установленной на направляющей 15. Направляющая 15 щарнирно соединена с поперечинами 9 и 10 портала, с которыми шарнирно соединены стойки портала в виде гидроцилиндров (ГЦ) 11 - 13. Другими концами ГЦ 11 -13 соединены щарнирно с Т 3. На ней закреплен с возможностью поворота в вертикальной плоскости транспортер 26. С элементами 9-13 портала и Т 3 соединены дополнитльные ГЦ 17-23 фиксации элементов 9-13, образующие с щарнирно сопряженной парой элементов треугольник. Цри подъезде манипулятора к ТО в случае необходимости изменяют колею его движения. Для этого манипуляторами 6 и 7 устанавливается в захвате 5 сменная опора, которая опускается до упора в опорную поверхность штрека. Затем фиксируются ГЦ 17-23 элементы 9-13 портала и колеса Т 3 разворачиваются на 90°. Перекатывают Т 3 на необходимое расстояние, чтобы выйти за габариты ТО, и одновременно выдвигают щтоки ГЦ И и 12. Фиксируют ГЦ 17-23 элементы 9-13 портала. Сменную опору укладывают на портале и выполняют развязку с ТО путем проезда над ним. 1 з.п. ф-лы, 2 ил. (С (Л 00 to 00 ГчЭ 4 
Составитель Л. Березкина
Редактор И. ШуллаТехред И. ВересКорректор В. Бутяга
Заказ 2730/22Тираж 454Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Шахтный самоходный манипулятор | 1985 |
|
SU1273579A1 |
| Шахтный самоходный манипулятор | 1983 |
|
SU1204739A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
