Изобретение относится к машиностроению, в частности к натяжным устройствам для передач с гибкой связью, и может быть использовано в механизмах аппаратов точной магнитной записи.
Известно использование для натяжения в ременных передачах подпружиненных роликов.
Известно также устройство, -содержащее ведущий и ведомый шкивы, охваченные приводным ремнем, рычаг с натяжным роликом, конец которого подпружинен.
Недостатком данного устройства является отсутствие контроля натяжения ремня и его оперативного регулирования, что в конечном итоге снижает надежность и стабильность работы передачи за счет .возможности проскальзывания ремня относительно шкивов.
Наиболее близким по технической сущности к предлагаемому устройству является привод текстильной машины, содержащий ведущий и ведомый шкивы, охваченные приводным ремнем, натяжной ролик, кинематически связанный с электромагнитом, и узел управления, выполненный в виде последовательно соединенных датчика проскальзывания приводного ремня, выпрямителя, интегратора и усилителя мощности. При этом датчик проскальзываХ|
Ю 00 СЯ
сл
ния приводного ремня представляет собой тахогенераторы, кинематически связанные соответственно с ведущим и ведомым шкивами, причем тахогенераторы включены последовательно и встречно по направлению тахоЭДС.
Известное устройство устраняет возникающие проскальзывания ремня, но не устраняет причины, их вызывающие. Кроме того, устройству присущи такие недостатки, как сложность, громоздкость, и инерционность, обусловленные сложным подбором и расчетом тахогенераторов, обеспечивающим широкий диапазон скоростей, низкой, разрешающей способностью, вызванной интегрирующим характером тахогенераторов, что ведет к снижению качества и стабильности работы устройства в целом.
Целью изобретения является повышение стабильности работы путем контроля и оперативного регулирования натяжения ремня,
Указанная цель достигается тем, что в устройство, содержащее ведущий и ведомый шкивы, охватывающий их приводной ремень, блок управления, выход которого подключен к обмотке электромагнита, кинематически связанного с натяжным роликом, введены два датчика контроля натяжения, два модулятора светового излучения, два измерительных блока, два сумматора, два постоянных запоминающих устройства, два задатчика и вычитатель, при этом датчики контроля натяжения расположены напротив заданных дуг покоя и каждый из них выполнен в виде оптических пар, включающих источник и приемник светового излучения, расположенных напротив щелевых диафрагм в светонепроницаемом экране, а каждый из модуляторов представляет собой последовательность светоотражающих участков, нанесенных равномерно по всей дли-- не наружной поверхности ремня, причем расстояние между штрихами для каждого из модуляторов равно длине дуги окружности между точками пересечения оптических осей источников излучения соответствующего датчика с поверхностью ремня, огибающей соответствующий шкив, причем модуляторы расположены на противоположных краях ремня, выходы датчиков контроля натяжения подключены через соответствующие измерительные блоки к первым входам соответствующих сумматоров, вторые входы которых соединены с первым датчиком, а выходы подключены через соответствующие постоянные устройства соответственно к первому и второму входам вычитателя, третий вход которого
соединен с вторым задатчиком, а выход подключен к входу блока управления, причем каждый из измерительных блоков состоит из трех триггеров, трех элементов И, двух элементов ИЛИ, преобразователя временного интервала в код, ждущего мультивибратора и регистра, при этом входные шины измерительного блока подключены соответственно к первым и вторым входам первых
0 элементов И и ИЛИ, соответственно к установочному и обнуляющему входам первого триггера, прямой и инверсный выходы которого соединены с первыми входами соответственно второго и третьего элементов И,
5 выход первого элемента И подключен к первому входу второго элемента ИЛИ, второй вход которого соединен с выходом ждущего мультивибратора, а выход второго элемента ИЛИ подсоединен к обнуляющему входу
0 второго триггера, счетный вход которого соединен с выходом первого элемента ИЛИ, а выход второго триггера подключен к вторым входам второго и третьего элементов И, входу ждущего мультивибратора, управляюще5 му входу регистра и через преобразователь временного интервала в код к информационному входу регистра, выход которого является выходной шиной измерительного блока, а знаковый вход соединен с выходом
0 третьего триггера, установочный и обнуляющий входы которого подключены к выходам соответственно второго и третьего элементов И,
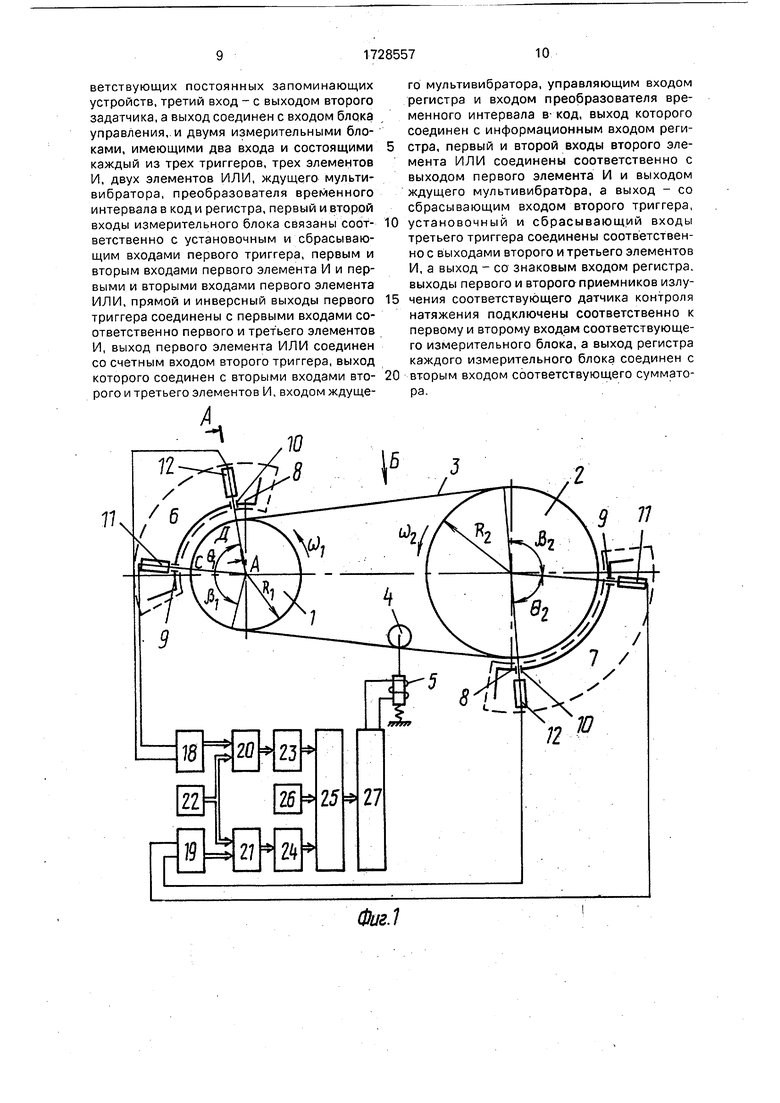
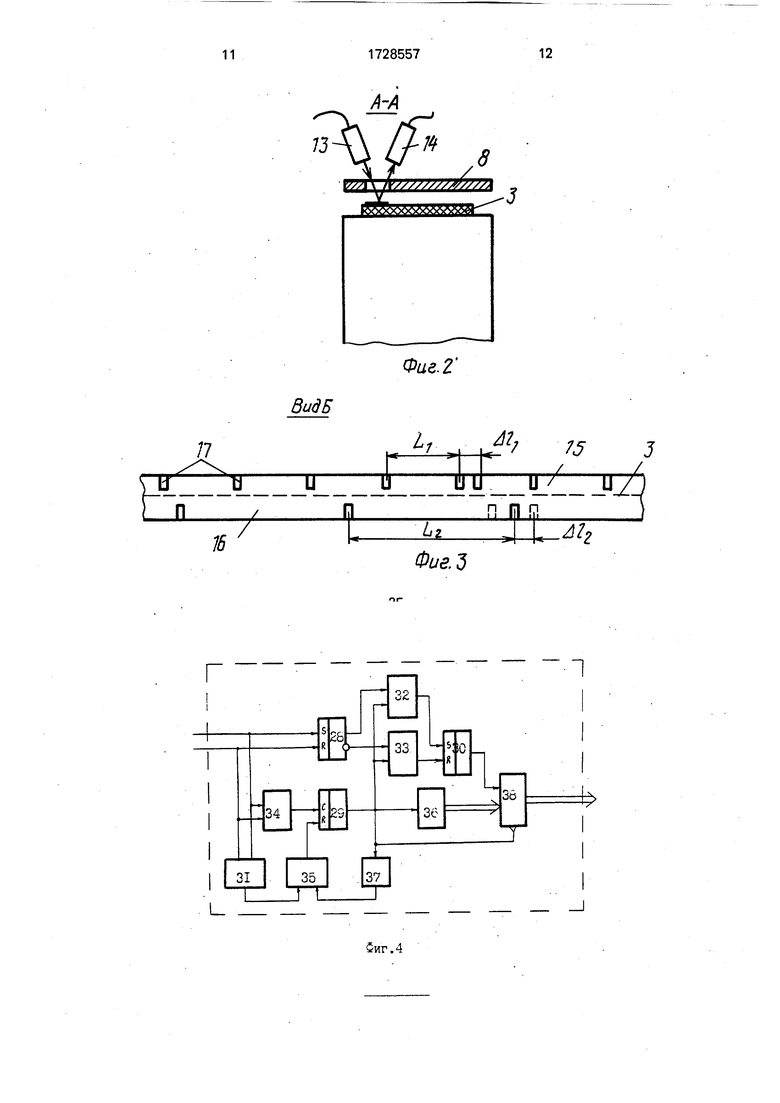
На фиг.1 представлено устройство, об5 щий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.З - вид Б на фиг. 1; на фиг;4 - блок-схема измерительного блока: на фиг.5 - диаграммы,
Устройство содержит ведущий 1 и ведо0 мый 2 шкивы, охватывающий их приводной ремень 3, который взаимодействует с натяжным роликом 4, кинематически связанным с электромагнитом 5. .Напротив заданных дуг покоя ремня 3, ограниченных
5 для шкива 1 углом в-, а для шкива 2 углом 6fe, размещены два идентичных датчика 6 и 7 контроля натяжения ремня, каждый из которых содержит светонепроницаемый экран 8 с двумя щелевыми диафрагмами 9 и
0 Ю, и две оптические пары 11 и 12, состоящие из источника 13 светового излучения и приемника 14 (фиг.2). При этом они установлены так, что оптические оси приемника 14 и источника 13 проходят через соответству5 ющую щелевую-дифрагму и пересекаются в точке, совпадающей с поверхностью ремня 3, плоскость, проведенная через оптические оси источника 13 и приемника 14, проходит через продольную ось симметрии щелевой
диафрагмы и ось вращения соответствующего шкива.
На наружной поверхности приводного ремня 3 расположены два модулятора 15 и 16 светового излучения, каждый из которых представляет собой последовательность светоотражающих участков 17, равномерно разнесенных по длине приводного ремня 3, причем модуляторы 15 и 16 расположены на противоположных краях ремня (фиг.З). Расстояние между участками модулятора 15, оптически взаимодействующего с датчиком 6, равно , причем , т.е. равно длине дуги между точками пересечения оптических осей оптических пар 11 и 12 датчика 6 с поверхностью ремня 3. Аналогично для модулятора 16 CiDi R2&1.
Выходы датчиков 6 и 7 контроля натяжения ремня подключены через измерительные блоки 18 и 19 к первым входам сумматоров 20 и 21, вторые входы которых нагружают выход задатчика 22, а выходы соединены через постоянные запоминающие устройства (ПЗУ) 23 и 24 с входами вычитателя 25, третий вход которого нагружает выход задатчика 26, выход которого через блок 27 управления соединен с обмотками электромагнита 5. При этом каждый из измерительных блоков 18 и 19 содержит три триггера 28-30, три элемента И 31-33, два элемента ИЛИ 34 и 35, преобразователь 36 временного интервала в код (ПВИК), ждущий мультивибратор 37 и регистр 38 с соответствующими связями (фиг.4).
Устройство работает следующим образом.
Ременным передачам присущ следующий недостаток - изменение передаточного отношения от нагрузки, которое объясняется наличием упругого проскальзывания на контактирующих поверхностях.
Дуга, по которой ремень охватывает шкив(фиг.1), делится на дугу покоя в, которая расположена при заходе ремня на шкив, и дугу упругого проскальзывания Д расположенную на сходе ремня со шкивом.
При наличии на ведомом шкиве момента сопротивления справедливо соотношение
Рвщ гвм,(1)
где РВЩ, FBN,- натяжение ведущей и ведомой ветвей ремня соответственно.
Для нормальной и стабильной работы передачи (без проскальзывания ремня) должно соблюдаться условие, определяемое формулой Эйлера
ещ
е
S
(2)
где/4 - коэффициент трения в паре шкив-ре- мень;
а- угол охвата.
После преобразования формула Эйлера примет вид
10
In (РВщ) -In (Рем) iCC.
(3)
5
Сущность упругого проскальзывания в ременной передаче состоит в том, что один и тот же элемент ремня, попадая на ведущую или ведомую ветвь, подвергается раз- ... личному натяжению и, следовательно, получает различное удлинение. Поступая на шкив в соответствующей ветви, на всей дуге покоя он сохраняет эти параметры, удержи0 ваемый неподвижными относительно шкива силами трения сцепления. При поступлении на дугу упругого проскальзывания элемент ремня начинает деформироваться, упруго проскальзывая относительно
5 шкива так, что при сходе шкива он имеет те же длину и натяжение, которые ему присущи в ветви, в которую он поступает.
Таким образом, при отсутствии движения натяжения ведущей и ведомой ветвей
0 ремня равны исходному натяжению, при- этом расстояния U и между штрихами 17 модуляторов 15 и 16 (фиг.З) равны длинам дуг между точками пересечения оптических осей оптических пар соответствующих дат5 чиков 6 и 7 с поверхностью ремня.
При движении выполняется условие (1), поэтому расстояния Li и La между штрихами 17 модуляторов 1Ъ и 16 изменяются в зависимости от изменений натяжения ре-,
0 Мня. Так, например, расстояние изменилось на Д Јi, прямо пропорционально изменению натяжения A Ft. В результате этого между импульсами (фиг.5 а, б), сформированными оптическими парами 11 и 12 датчики 6 кон5
троля натяжения, появляется временное
рассогласование Д t, прямо пропорциональное изменению натяжения ремня. На выходе измерительного блока 18 появляется код, соответствующий Д FL Аналогичным
0 образом происходит измерение изменения натяжения Д F2 в другой ветви ремня.
Значения Д FI и ДР2 поступают на первые входы соответствующих сумматоров 20 и 21, на вторые входы которых поступает
5 значение начального натяжения ремня Рнач с задатчика 22, Коды с выхода сумматоров 20 и 21, соответствующие (Рнач+ Д FI) и (Рнач+ Д F2) являются адресными для ПЗУ 23 и 24, в которых занесена функция In. После
логарифмирования посредством вычитате- ля получают разность 1п(РНач+ A Ft)- -1 п(Рнач+ AF2), по результату которой блок 27 управления производит корректировку положения прижимного ролика посредством электромагнита 5. Таким образом, при изменении нагрузки на ведомом шкиве либо при растягивании ре- .мня автоматически поддерживается соотношение Эйлера (2).
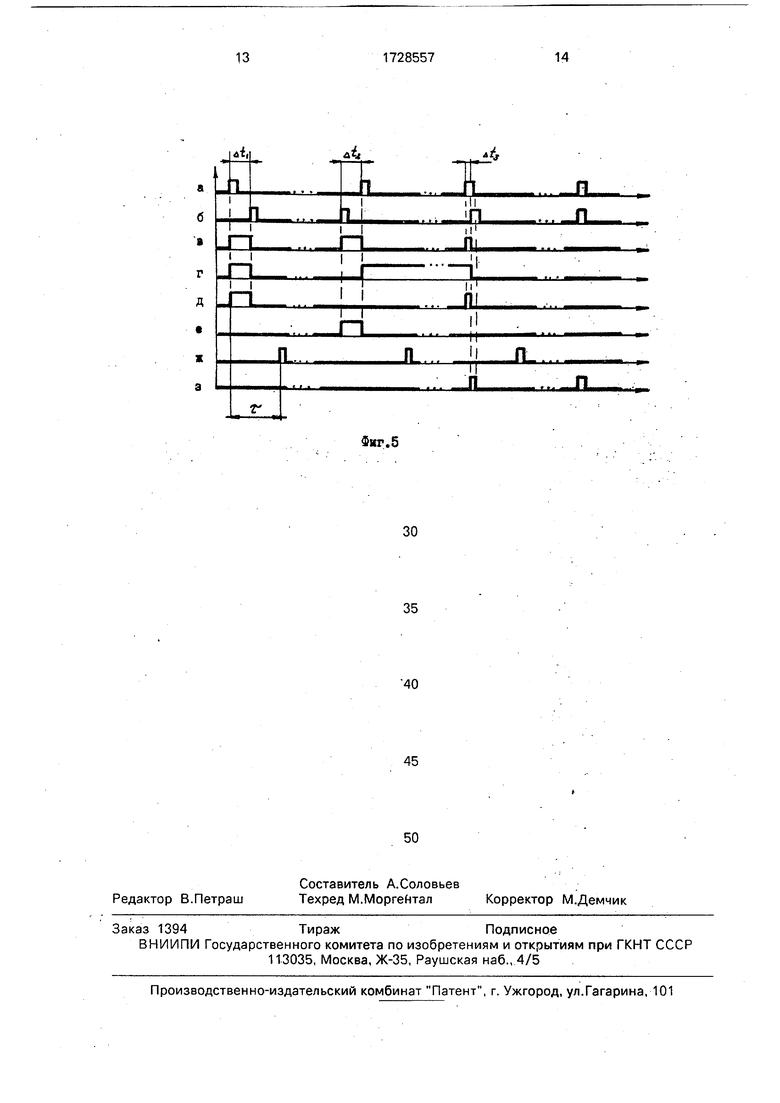
Работа измерительных блоков 18 и 19 (фиг.4) происходит следущим образом. Например, при увеличении натяжения ремня 3 происходит его удлинение, поэтому импульс (фиг.Ба) с выхода оптической пары 11 появляется быстрее, чем импульс (фиг.5б) с выхода оптической пары 12, на время Ati, пропорциональное удлинению. По переднему фронту импульса с выхода оптической пары 11 происходит установка в единицу триггеров 28 и 29 (фиг.Бв, г). По переднему фронту импульса (фиг.56) с выхода оптической пары 12 происходит переключение триггера 29 в нулевое состояние и обнуление триггера 18 (фиг.бв, г). На выходе триггера 29 формируется импульс (фиг.бд) длительностью Ati, пропорциональной удлинению ремня. Этот импульс проходит через открытый в данный момент высоким потенциалом с прямого выхода триггера 28 (фиг.5г) элемент 32 И(фиг.5д)и устанавливает триггер 30 в единичное состояние, что обозначитудлинение ремня, т.е. увеличение его натяжения. Кроме этого, импульс с выхода триггера 29 поступает на вход ПВИК 36, на выходе которого появляется код, соответствующий изменению натяжения A FI. По заднему фронту импульса с выхода триггера 29 этот код, записывается в регистр 38. По переднему фронту импульса с выхода триггера 29 ждущий мультивибратор 37 через время формирует короткий импульс (фиг.5ж), который проходит через элемент ИЛИ 35 и подтверждает нулевое состояние триггера 29.
При уменьшении натяжения ремня, т.е. его сжатии, импульс с выхода оптической пары 12 (фиг.5б) появляется быстрее импульса с выхода оптической пары 11 на время At2, пропорциональное сжатию ремня. Поэтому на момент формирования импульса с выхода триггера 29 (фиг.5в) длительностью At2 триггер 28 находится в нулевом состоянии (фиг.5г) и этот импульс проходит через открытый высоким потенциалом с инверсного выхода триггера 28 элемент И 33 (фиг.5е) и устанавливает триггер 30 в нулевое состояние, что означает уменьшение натяжения ремня. Измерение величины этого
изменения происходит приведенным выше образом,
При незначительных изменениях натяжения ремня происходит наложение по вре5 мени импульсов с выходоов оптических пар 11 и 12 (фиг.Ба, б). Поэтому сброс в нулевое состояние триггера 29 (фиг.бв) происходит по переднему фронту импульса с выхода элемента И 31 (фиг.5з). Измерение величи0 ны изменения натяжения и его знак определяют указанным выше образом.
При отсутствии изменения натяжения ремня импульсы с выходов оптических пар 11 и 12 появляются синхронно,
5 поэтому триггер 29 остается в нулевом состоянии.
Таким образом, предлагаемое натяжное устройство для передач с гибкой связью посредством постоянного контроля натяже0 ния ремня и его оперативного регулирования позволит устранить причины проскальзывания ремня, повысит надежность и стабильнось работы и, в конечном итоге, повысит качество и достоверность
5 отображения регистрируемой информации.
Формулаизобретения
Натяжное устройство для передач с гиб0 кой связью, содержащее ведущий и ведомый шкивы, охватывающий их приводной ремень, блок управления, подключенный к его выходу электромагнит и связанный с последним натяжной ролик, отличаю5 щ е е с я тем, что, с целью повышения стабильности работы путем контроля и оперативного регулирования натяжения ремня, устройство снабжено двумя расположенными напротив заданных дуг покоя датчика0 ми контроля натяжения, каждый из которых состоит из светонепроницаемого экрана с двумя щелевыми диафрагмами и расположенных напротив последних двух оптических пар, включающих источник и
5 приемник излучения, двумя модуляторами, каждый из которых выполнен в виде светоотражающих участков, равномерно расположенных на наружной поверхности ремня с шагом, равным длине дуги окружности
0 между точками пересечения оптических осей источников излучения соответствующего датчика с наружной поверхностью ремня, двумя задатчиками, двумя сумматорами, первый вход каждого из которых сое5 динен с выходом первого задатчика, двумя постоянными запоминающими устройствами, адресный вход каждого из которых сое- динен с выходом соответствующего сумматора, вычитателем, первый и второй входы которого соединены с выходами соответствующих постоянных запоминающих устройств, третий вход - с выходом второго задатчика, а выход соединен с входом блока управления,.и двумя измерительными блоками, имеющими два входа и состоящими каждый из трех триггеров, трех элементов И, двух элементов ИЛИ, ждущего мультивибратора, преобразователя временного интервала в код и регистра, первый и второй входы измерительного блока связаны соответственно с установочным и сбрасывающим входами первого триггера, первым и вторым входами первого элемента И и первыми и вторыми входами первого элемента ИЛИ, прямой и инверсный выходы первого триггера соединены с первыми входами соответственно первого и третьего элементов И, выход первого элемента ИЛИ соединен со счетным входом второго триггера, выход которого соединен с вторыми входами второго и третьего элементов И, входом ждуще0
го мультивибратора, управляющим входом регистра и входом преобразователя временного интервала в- код, выход которого соединен с информационным входом регистра, первый и второй входы второго элемента ИЛИ соединены соответственно с выходом первого элемента И и выходом ждущего мультивибратора, а выход - со сбрасывающим входом второго триггера, установочный и сбрасывающий входы третьего триггера соединены соответственно с выходами второго и третьего элементов И, а выход - со знаковым входом регистра, выходы первого и второго приемников излу- 5 чения соответствующего датчика контроля натяжения подключены соответственно к первому и второму входам соответствующего измерительного блока, а выход регистра каждого измерительного блока соединен с вторым входом соответствующего сумматора.
0
vsjvmkfssssssssssssss.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования скорости подачи электродной проволоки | 1984 |
|
SU1201080A1 |
| КОМПЛЕКС ЭЛЕКТРОСНАБЖЕНИЯ ВАГОНА (ВАРИАНТЫ) | 2003 |
|
RU2264928C2 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Устройство управления центрированием ткани | 1988 |
|
SU1601246A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| ИНФУЗИОННЫЙ НАСОС-ДОЗАТОР | 1991 |
|
RU2019191C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ОБЪЕКТА | 1989 |
|
RU2087915C1 |
| Цифровой автоматический экстремальный мост переменного тока | 1978 |
|
SU763803A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЕРЕДАЧИ С ГИБКОЙ СВЯЗЬЮ | 2007 |
|
RU2345338C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМНОЙ СКОРОСТИ МОЧЕИСПУСКАНИЯ И ОБЪЕМА ВЫДЕЛЕННОЙ МОЧИ | 1993 |
|
RU2071724C1 |
Использование: машиностроение, натяжные устройства для передач с гибкой связью, например механизмы аппаратов точной магнитной записи. Сущность изобретения: натяжное устройство содержит ведущий и ведомый шкивы, охваченные приводным ремнем. Установленные напротив шкивов датчики контроля натяжения имеют каждый две оптические пары, включающие источник и приемник излучения. Приводной ремень имеет на наружной поверхности равномерно расположенные све- тоотражающие участки. Сигналы с приемников излучения соответствующих датчиков контроля натяжения поступают на два измерительных блока. В двух сумматорах происходит сложение сигналов с соответствующего измерительного блока и с первого задатчика. Выходы сумматоров связаны с адресными входами постоянных запоминающих устройств (ПЗУ). В вычитателе происходит преобразование сигналов с выходов ПЗУ и второго задатчика. Результирующий сигнал поступает на блок управления, который при помощи электромагнита регулирует положение натяжного ролика. 5 ил. сп С
ВидБ
/7
и
и
л
/5
/
г
34
L.
37
гт т
Фиг. 2
т- Л
frft
к з
/
JJJJU / U/|
П П П)
Lz
Фиг.Ъ
П
36
| Травников Е.Н | |||
| Механизмы аппаратуры магнитной записи | |||
| - Киев; Техника, 1976, с.464 | |||
| Михневич А.В | |||
| Лентопротяжные механизмы - М.: Энергия, 1971, с.88 | |||
| Привод текстильной машины | 1984 |
|
SU1214961A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
