Изобретение относится к электротехнике, электродвигателям линейного и вращательного перемещения и может быть использовано в позиционных устройствах.
Целью изобретения является увеличение тягового усилия.
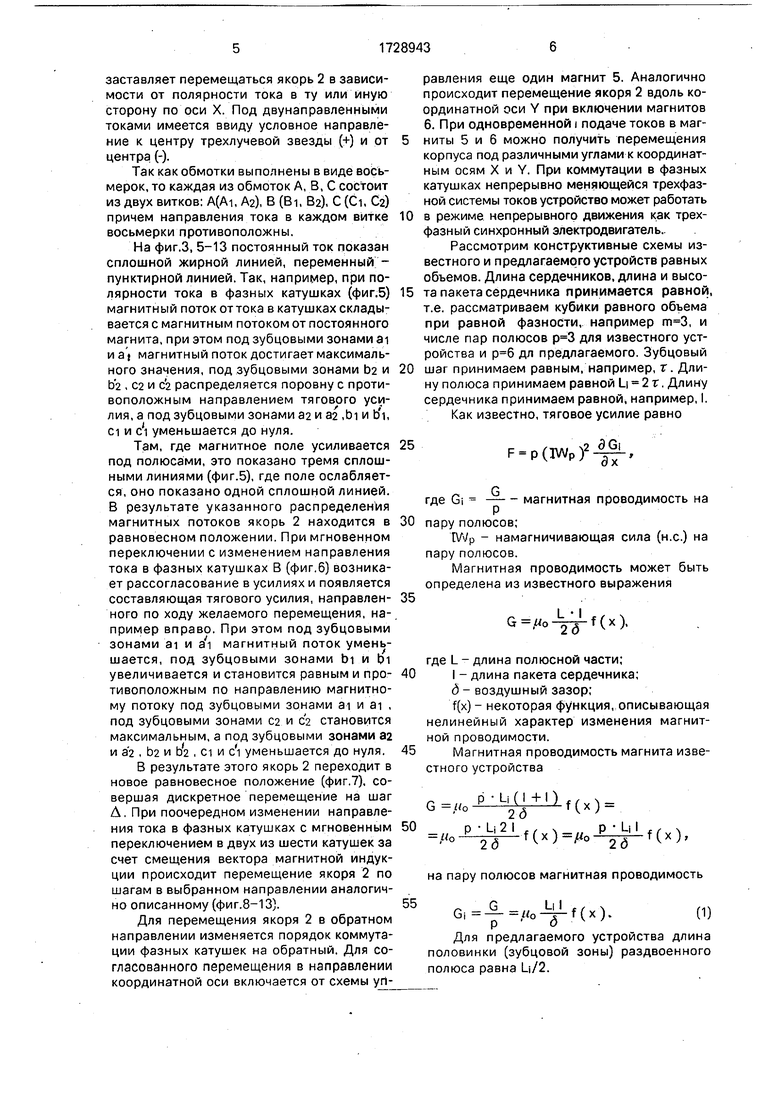
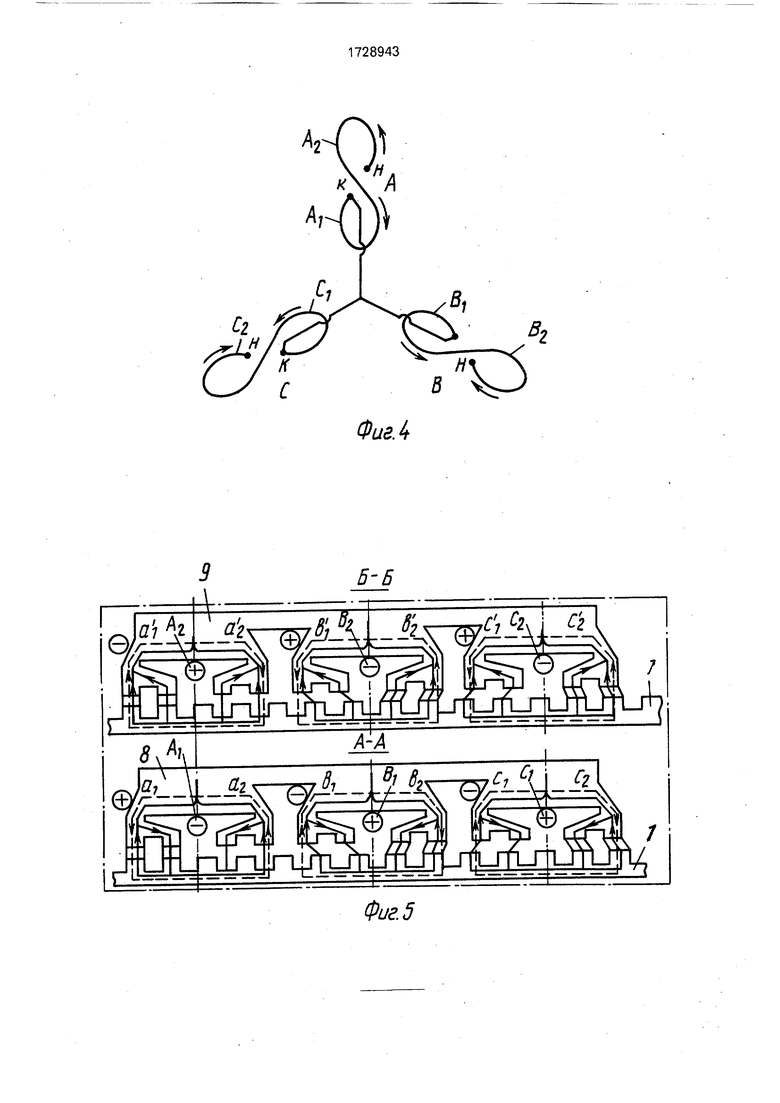
На фиг.1 показана конструктивная схема электродвигателя; на фиг.2 - магнит, аксонометрия; на фир.З - разрезы А-А и Б-Б на фиг.2; на фиг.4 - схема включения 8-об- разных катушек в трехфазном выполнении; на фиг.5-13 - схемы, поясняющие физическую сущность работы электродвигателя; на фиг.14 - диаграммы токов в катушках.
Шаговый электродвигатель содержит ферромагнитный зубчатый статор 1 и якорь 2 (фиг.1). Статор 1 выполнен в виде листа из ферромагнитного материала с сетчатой зуб- цовой структурой по осям X и Y. Пазы 3 зубцов 4 выполнены немагнитным материалом. Якорь 2 содержит два параллельных магнита 5 для движения по оси X и два параллельных магнита 6 для движения по оси Y. Каждый из магнитов, например магнит 5, содержит якорь 7 (фиг.2), включающий в себя два сердечника 8 и 9. Сердечники 8 и 9 имеют пазы 10, образующие зубчатые полюса 11-13 на сердечнике 8 и зубчатые полюса 14-16 на сердечнике 9.
На каждом из полюсов имеются группы зубцов, сдвинутых относительно зубцов статора 1. Полюса 11-13 сердечника 8 и полюса 14-16 сердечника 9 выполнены раздвоенными с помощью дополнительного паза 17, перпендикулярного оси движения X. При этом на каждом из раздвоенных полюсов сердечников 8 и 9 образуются по две зубцовые зоны (фиг.З).
Зубцовые зоны раздвоенных полюсов 11-13 сердечника 8 обозначены как ач и 32, bi и D2, ci и С2, зубцовые зоны раздвоенных полюсов 14-16 сердечника 9 обозначены соответственно как a i и 32 , bi и D2, с ч и С2 . Раздвоенный полюс 11 сердечника 8 и раздвоенный полюс 14 сердечника 9, раздвоенный полюс 12 сердечника 8 и раздвоенный полюс 15 сердечника 9, раздвоенный полюс 13 сердечника 8 и раздвоенный полюс 16 сердечника 9 расположены соосно в плоскостях, D, Е, F, перпендикулярных оси движения X и параллельных между собой.
Для двигателей вращательного перемещения оси раздвоенных полюсов расположены в радиальных плоскостях, проходящих через ось ротора и его образующую. Указанные плоскости в шаговых электродвигателях как линейного, так и вращательного перемещений расположены одна от другой на расстоянии, кратном
1/Зт при трехфазном выполнении, например г(п±2/3).
На раздвоенном полюсе 11 сердечника 8 и противолежащем раздвоенном полюсе
14 сердечника9 расположена фазная катушка А, на раздвоенном полюсе 12 сердечника 8 и противолежащем раздвоенном полюсе 14 сердечника 9 расположена фазная катушка В, на раздвоенном полюсе 13 сердечника 8 и противолежащем раздвоенном полюсе 16 сердечника 9 расположена фазная катушка С (фиг.2-4).
Для согласования магнитных потоков в сердечниках 8 и 9 фазные катушки выподмены в виде восьмерок, объединяющих указанные противолежащие соосно расположенные полюса в пары; полюса 11 и 14, фазная катушка А- первая пара; полюса 12 и 15, фазная катушка В - вторая пара; полюса 13 и 16, фазная катушка С - третья пара. При указанном расположении пар раздвоенных полюсов сдвиг зубцов в зубцовых зонах раздвоенных полюсов относительно зубцов статора равен: в первой паре ai и 32
соответственно 0 и 1/2, a i и 32 0 и 1/2; во
второй паре bi и D2 соответственно 2/3 и
1 /6, b i и D2 2/3 и 1 /6; в третьей.паре ci и С2
соответственно 1 /3 и 5/6, ci и С2 1/3 и 5/6.
Между сердечниками 8 и 9 расположен
постоянный магнит 18, ось намагниченности которого направлена вдоль пазов 10 и 17, перпендикулярных оси движения. Постоянный магнит 18 выполнен в виде пластин, например, из редкоземельных
материалов. Фазность устройства может быть различная: 2,3, 4... Таким образом, при m-фазном выполнении на сердечниках 8 и 9 имеется по 2т зубчатых полюсов с учетом раздвоенности и m-фазных катушек, выполненных в виде восьмерок.
Аналогично устроен магнит 6 в якоре 2 для движения по оси Y.
Шаговый электродвигатель работает следующим образом.
Для создания магнитовоздушной подвески в якорь 2 подается сжатый воздух. Сила притяжения, создаваемая магнитной связью между статором 1 и якорем 2, и сила отталкивания, образуемая давлением воздуха, создают стабилизированный воздушный зазор 6 (фиг.З) между ними.
Якорь 2 перемещается без трения по статору 1 вдоль оси X следующим образом.
В фазные катушки А, В, С магнита 5 от схемы управления подаются двунаправленные токи, при этом суммарный вектор магнитной индукции при сложении отдельных составляющих испытывает смещение и
заставляет перемещаться якорь 2 в зависимости от полярности тока в ту или иную сторону по оси X. Под двунаправленными токами имеется ввиду условное направление к центру трехлучевой звезды (+) и от центра (-).
Так как обмотки выполнены в виде восьмерок, то каждая из обмоток А, В, С состоит из двух витков: A(Ai, Аз), В (Вт, 82), С (Ci. €2) причем направления тока в каждом витке восьмерки противоположны.
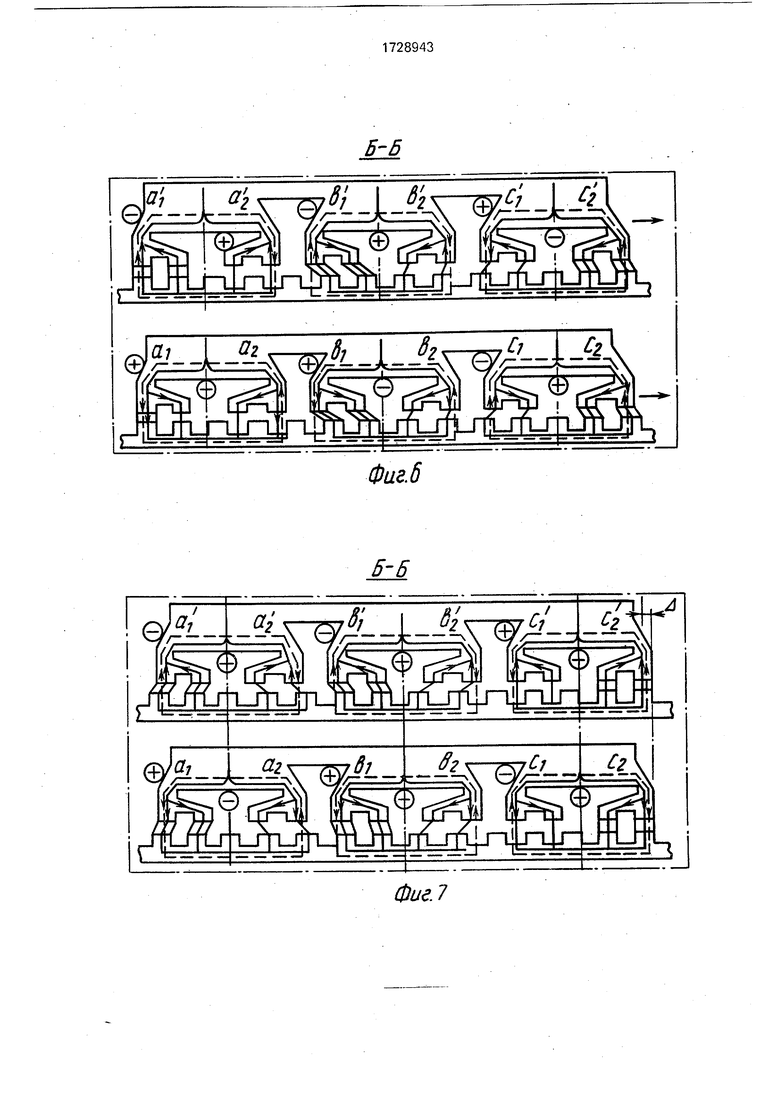
На фиг.З, 5-13 постоянный ток показан сплошной жирной линией, переменный; - пунктирной линией. Так, например, при полярности тока в фазных катушках (фиг.5) магнитный поток оттока в катушках складывается с магнитным потоком от постоянного магнита, при этом под зубцовыми зонами ai и a t магнитный поток достигает максимального значения, под зубцовыми зонами Ь2 и , С2 и распределяется поровну с противоположным направлением тягового усилия, а под зубцовыми зонами 32 и 32 ,bi и b i, ci и c i уменьшается до нуля.
Там, где магнитное поле усиливается под полюсами, это показано тремя сплошными линиями (фиг.5), где поле ослабляется, оно показано одной сплошной линией. В результате указанного распределения магнитных потоков якорь 2 находится в равновесном положении. При мгновенном переключении с изменением направления тока в фазных катушках В (фиг.6) возникает рассогласование в усилиях и появляется составляющая тягового усилия, направленного по ходу желаемого перемещения, например вправо. При этом под зубцовыми зонами ai и a i магнитный поток уменьшается, под зубцовыми зонами bi и bi увеличивается и становится равным и противоположным по направлению магнитному потоку под зубцовыми зонами ai и ai , под зубцовыми зонами С2 и С2 становится максимальным, а под зубцовыми зонами 32 и а-2 , Ь2 и b2 , ci и c i уменьшается до нуля.
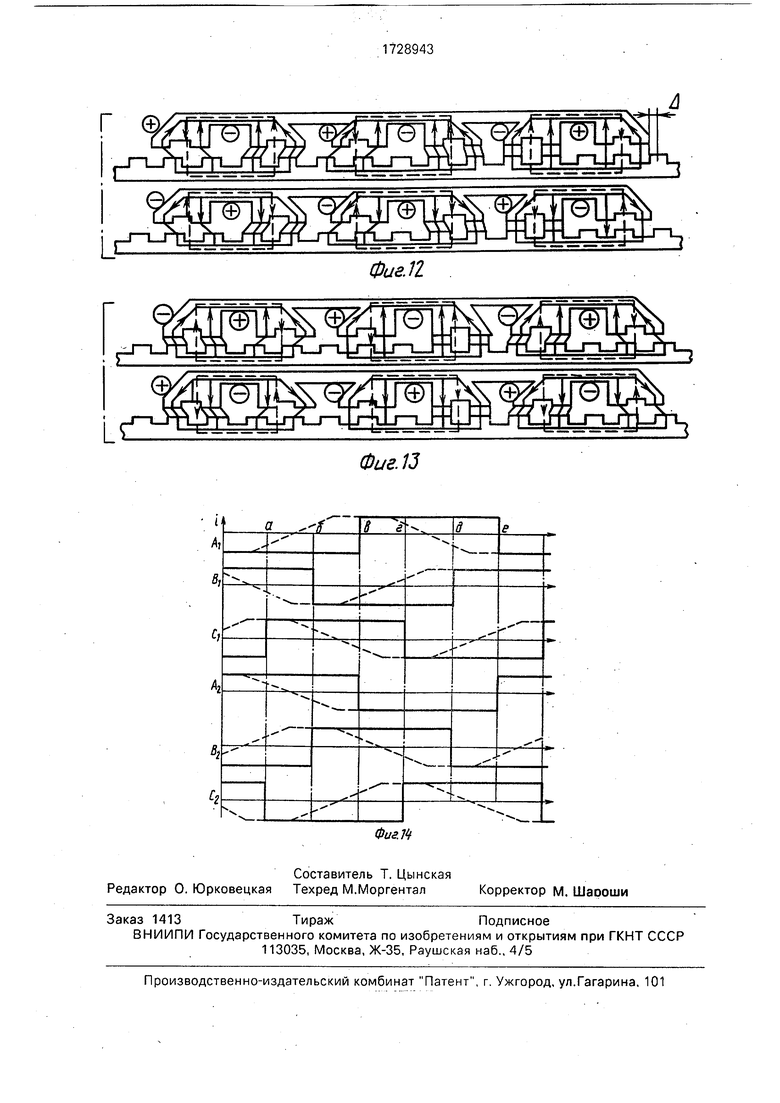
В результате этого якорь 2 переходит в новое равновесное положение (фиг.7), совершая дискретное перемещение на шаг Д. При поочередном изменении направления тока в фазных катушках с мгновенным переключением в двух из шести катушек за счет смещения вектора магнитной индукции происходит перемещение якоря 2 по шагам в выбранном направлении аналогично описанному (фиг.8-13).
Для перемещения якоря 2 в обратном направлении изменяется порядок коммутации фазных катушек на обратный. Для согласованного перемещения в направлении координатной оси включается от схемы управления еще один магнит 5. Аналогично происходит перемещение якоря 2 вдоль координатной оси Y при включении магнитов 6. При одновременной i подаче токов в магниты 5 и 6 можно получить перемещения корпуса под различными углами к координатным осям X и Y. При коммутации в фазных катушках непрерывно меняющейся трехфазной системы токов устройство может работать
в режиме непрерывного движения как трехфазный синхронный электродвигатель.
Рассмотрим конструктивные схемы известного и предлагаемого устройств равных объемов. Длина сердечников, длина и высота пакета сердечника принимается равной, т.е. рассматриваем кубики равного объема при равной фазности, например , и числе пар полюсов для известного устройства и дл предлагаемого. Зубцовый
шаг принимаем равным, например, т. Длину полюса принимаем равной Li 2r. Длину сердечника принимаем равной, например, I. Как известно, тяговое усилие равно
25
F P(IWP)24
Эх
где Gi магнитная проводимость на
пару полюсов;
TWp - намагничивающая сила (н.с.) на пару полюсов.
Магнитная проводимость может быть определена из известного выражения .
),
где L - длина полюсной части; | - длина пакета сердечника; 6 - воздушный зазор; f(x) - некоторая функция, описывающая нелинейный характер изменения магнитной проводимости.
Магнитная проводимость магнита известного устройства
6-,..- + (х)-/ .)-.-)
на пару полюсов магнитная проводимость
55
G,(x).
0)
Для предлагаемого устройства длина половинки (зубцовой зоны) раздвоенного полюса равна U/2.
Длина полюсной части сердечников .
Магнитная проводимость для магнита ()5
cL (l-H) .. ;Ц.
G
26
f(x)(x)
и на пару полюсовмагнитная проводимость 10
бб f(x)(x) G „ 3L,I f,.. Ul
Так как полюс раздвоенный, то прово- димость пары раздвоенных полюсов определяется путем сложения магнитных проводимостей в парах зубцовых зон раздвоенного полюса, как в параллельные цепи, т.е. магнитная проводимость пары раздвоенных полюсов равна
(x)(x) (x),
Из выражения (2) видно, что проводимость пары раздвоенных полюсов предлагаемого устройства равна магнитной проводимости пары полюсов известного (1). За счет выполнения фазных катушек в виде восьмерок с образованием двух намагничивающих сил на пару полюсов 2lWp увеличивается тяговое усилие.
Если взять одинаковой длины провод и намотать его на сердечники обоих устройств, то в устройстве по изобретению тяговое усилие будет больше. Действительно, подставляя полученные выражения маг- нитных проводимостей и намагничивающих сил в выражение для тягового усилия получим для известного устройства
,2 dGi 0 ,1|А| Л2 3Gi
(IWp) 3(lWp)
и для предлагаемого
(lWp)2-l + p(lWp)2AGj.3-2
х( aGi
Эх
Сравнивая приведенные выражения тягового усилия для обоих устройств, видно, что тяговое усилие в устройстве, выполненном по изобретению, в 2 раза больше тягового усилия известного устройства. Строго говоря, длина провода будет несколько больше за счет переходов в месте переплетения восьмерки, но так как усилие возрастает, толщину пакетов сердечников можно выполнить меньше. За счет увеличения тягового усилия при одной и той же массе магнитов предлагаемый электродвигатель развивает значительно большее ускорение.
В известном выражении ускорение -Ј
где F - усилие;
m - масса устройства. Для прототипа получаем
F
25
Для устройства, выполненного по изобретению,
2 F
3035
32
m
2 ai,
т.е. ускорение, развиваемое приводом, в 2 раза больше, чем у прототипа.
Формула изобретения
Шаговый электродвигатель, содержащий неподвижный ферромагнитный зубчатый статор, подвижный якорь, состоящий из сердечников с пазами, образующих полюса с группой зубцов на каждом полюсе, сдвинутых относительно зубцов статора, посто- янный магнит, ось намагниченности которого направлена вдоль пазов сердечников, расположенный между сердечниками, и m-фазные катушки, расположенные на сердечниках, отличающийся тем, что, с целью увеличения тягового усилия, сердечники снабжены дополнительными пазами, раздваивающими каждый полюс, а катушки выполнены в виде восьмерок, объединяющих полюса противолежащих сердечников в пары, которые расположены соосно в плоскости, перпендикулярной оси перемещения.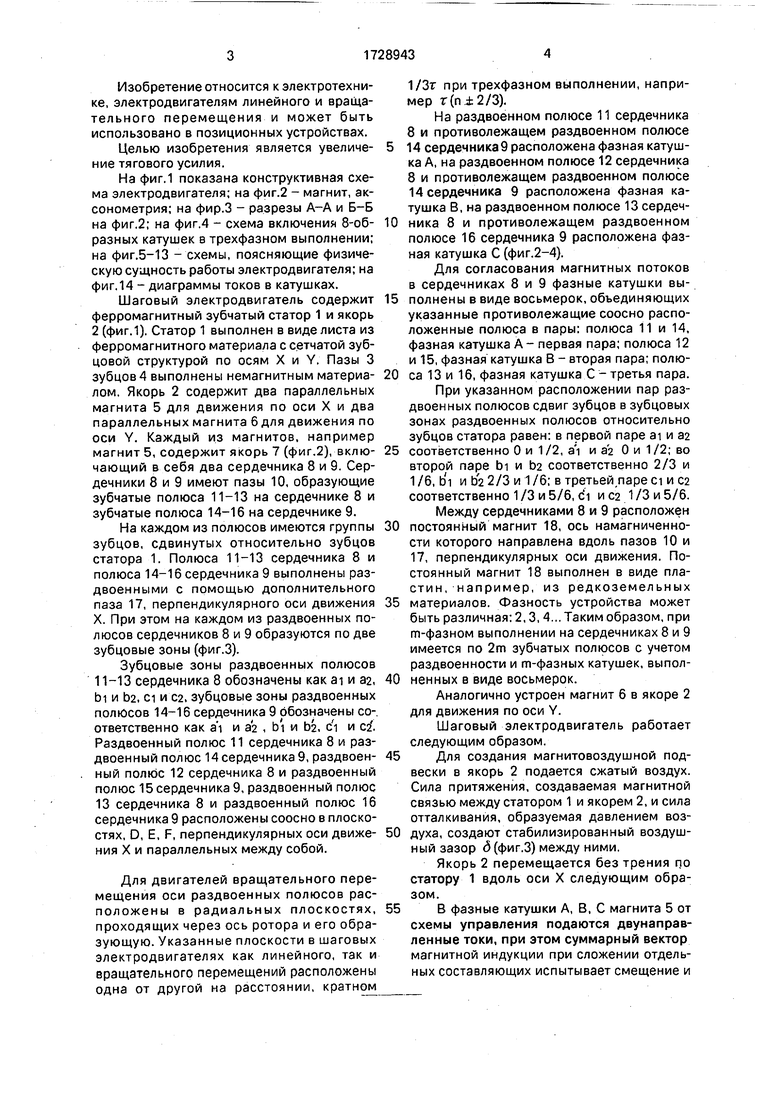
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1985 |
|
SU1403268A1 |
| Вентильный электродвигатель | 1985 |
|
SU1403267A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| Вентильный электродвигатель | 1985 |
|
SU1427509A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |

Изобретение относится к электротехнике, а именно к электрическим машинам линейного перемещения. Целью изобретения является увеличение тягового усилия, Электродвигатель содержит статор 1 с сетчатой зубчатой структурой и якорь 2, включающий в себя два сердечника 8 и 9 с пазами 10, образующих зубчатые полюса 11-13 на сердечнике 8 и зубчатые полюса 14-16 на сердечнике 9. Между сердечниками размещен постоянный магнит 18. На каждом из полюсов имеются группы зубцов, сдвинутых относительно зубцов статора. Каждый полюс с помощью дополнительного паза 17 выполнен раздвоенным с образованием двух зуб- цовых зон, смещенных одна относительно другой на половину зубцового шага. Раздвоенные полюса противоположных сердечников расположены соосно в плоскостях, параллельных между собой и перпендикулярных оси перемещения, и содержат фазные катушки, выполненные в виде восьмерок, объединяющих раздвоенные соосно расположенные полюса сердечников в пары. Положительный эффект достигается согласованием магнитных потоков и соответственным увеличением намагничивающей силы. 14 ил. /8 15 (Л С
/55- Фие.Т
Фиг. 4
Фиг. 5
Фиг.6
Фие.7
Фиг.8
Фиг.11
Фиг. 13
| РЫХЛИТЕЛЬ | 1995 |
|
RU2085666C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
