Изобретение относится к моделированию биологических нейронов и предназначено для экспериментальных и теоретических исследований при изучении целенаправленного поведения биологических объектов. Кроме того, изобретение может найти применение при производстве искусственного нейрона - модуля нейрокомпьютера.
Цель изобретения - расширение функциональных возможностей на основе использования прошлого опыта и путем увеличения разнообразия поведенческих парадигм.
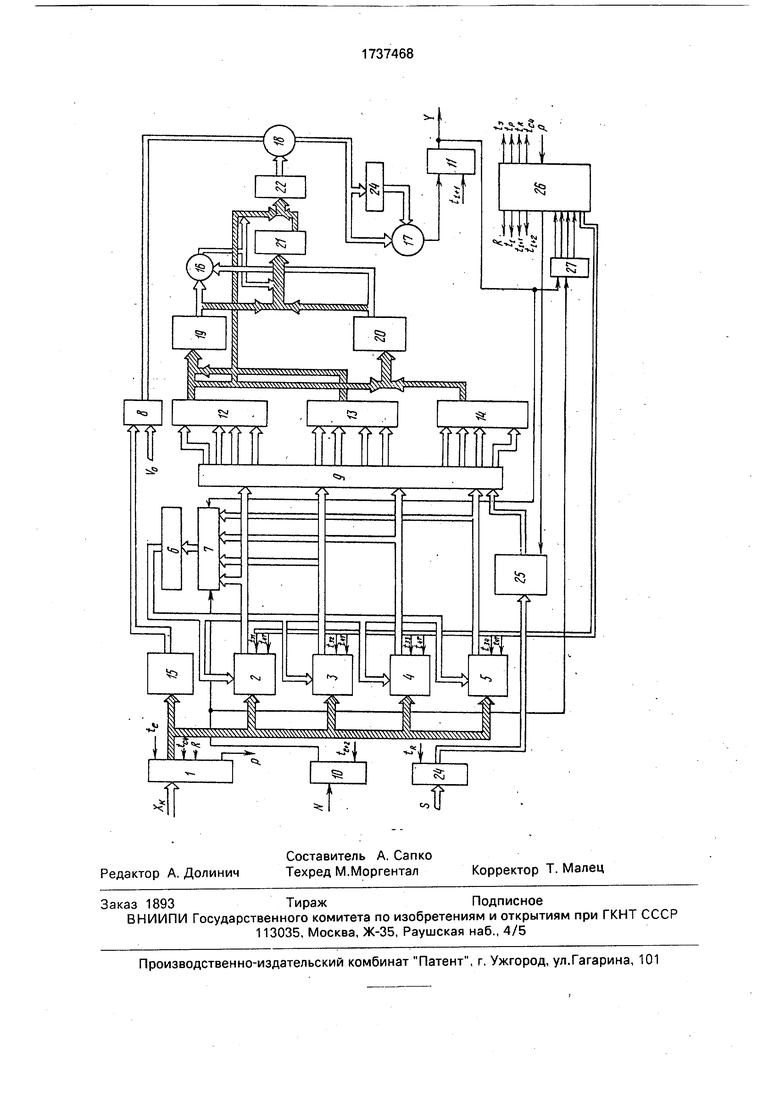
На чертеже представлена функциональная схема устройства для моделирования целенаправленной деятельности нейрона.
Для функционирования способа необходимо выполнить следующие основные приемы и операции. Пусть на вход поступил
сигнал X (t) (Xi(t), Xa(t)Xr(t)), где г - число
входов модели, at- время. Примем для
„
определенности t 1, 2, ...; Xj(t) 0 или Xi(t) 1. Сигнал Хо является сигналом награды , пусть это будет сигнал Х0 (1,0, О
0). Модель может генерировать сигнал команды Y 1 или Y 0. Сигнал S, поступающий на отдельный вход модели, определяет режим работы модели до момента прихода следующего сигнала на этот вход. Если X(t) f X0 ранее поступал на вход модели и при первом появлении являлся j-ым незнакомым сигналом, то ему соот- ветствуют целые nj4, nj4, nj, n числа случаев, когда после сигнала X(t) генерировался сигнал команды Y 1 и поступил сигнал награды Х0 1, генерировался сигнал команды Y 1 и не поступил сигнал награ- ды и т.д.
Если X(t) безразличный сигнал, а V0 порог для безразличного сигнала, то сигнал команды Y 1 генерируют, если АО 2Xi(t) V0. Если X(t) не являет- ся безразличным сигналом, то порог генерации команды и сумму координат входного сигнала изменяют, в зависимости от прогноза его информационного значения. В зависимости от значения управляющего сигнала S имеется пять вариантов определения суммы координат входного сигнала.
В первом варианте сумму координат входного сигнала изменяют в зависимости от статистического прогноза превышения вероятности получения сигнала награды над вероятностью его отсутствия при условии отсутствия сигнала команды на основе информации, накопленной ранее при действии этого сигнала. Эти вероятности и число степеней свободы системы рассчитывают по формулам
ЛЛ
+
П + п
+ 2
М
. П +1 1 n + + и + +п- + f n + 2
(2)
Ni n
-i-
+ n +n
+ n
В третьем варианте сумму координат входного сигнала изменяют в зависимости от статистического прогноза превышения доли событий с отсутствием сигналов награды при условии отсутствия сигнала команды над долей событий с отсутствием сигналов награды при генерации сигнала команды. Эти доли и число степеней свободы рассчитывают по формулам
i/i +n + 1
Mr -JCT;:п:
П +п 4-2
М1 П+-+1
n + n +2
(3)
N1 + rf
В формулах (1) - (3) учтено, что вероятности для незнакомого сигнала, который считается безразличным, принимаются равными 0,5. Вероятность Pi безошибочного прогноза разности Јi Mi МГ оценивают по критерию Стьюдента. Критерий достоверности разности оценивают по формуле
где
т
2Mt ДАТ N,
Изобретение относится к моделированию биологических нейронов и предназначено для экспериментальных и теоретических исследований при изучении целенаправленного поведения биологических объектов, а также для создания искус- ственного нейрона - модуля нейрокомпьютера. Цель изобретения - расширение функциональных возможностей на основе использования прошлого опыта и увеличение разнообразия поведенческих парадигм, С этой целью в способе модифицируют сумму координат входного сигнала и команду генерируют, если модифицированная сумма координат превзошла модифицированный порог. Оценки событий осуществляют в зависимости от прихода сигнала, переключающего режим работы, причем имеются четыре варианта определения прогноза для модификации порога и пять вариантов для модификации суммы координат, что позволяет получить режимы работы, моделирующие широкий спектр парадигм обучения. Способ реализуется путем введения в состав известного устройства первого и второго мультиплексоров, блока элементов И, трехмноговходовых сумматоров, сумматора координат, сумматора, двух блоков определения вероятности, блока критерия достоверности, блока определения безошибочной вероятности, двух регистров, блока коммутации. Предложенный способ моделирования и основанное на нем устройство позволяет моделировать свойства избирательного изменения возбудимости биологических нейронов. 2 п. ф-лы, 1 ил. 4
М,
1- +
+
Ni n + n
И)
Во втором варианте сумму координат входного сигнала изменяют в зависимости от статистического прогноза превышения вероятности получения сигнала награды над вероятностью его отсутствия. Вероятности и число степеней свободы рассчитывают по формулам
м
п+П
vi+H + )- n 2
- ошибка репрезентативности Ј1; a id - стандартное значение критерия Стьюдента. Если сумма координат входного сигнала изменяется в пределах А А0 ± а, то ее модифицированное значение определяют по формуле:
A A0 + aPisgn |i (4)
55
В четвертом варианте сумму координат входного сигнала изменяют в зависимости от статистического прогноза тетрахорического показателя связи фактов наличия или отсутствия сигнала награды с
фактами наличия или отсутствия сигнала команды, вычисляемого по формуле
г л|(и + + +п + -Кп1++п- + )(п-- + п+-Нп-- + п + )
Вероятность Pi наличия связи между указанными факторами оценивают по критерию хи-квадрат при числе степеней свободы, равном единице. Критерий достоверности оценивают по формуле
rNi Јst2
где N1 п + + п++ + гГ; #я - стандартное значение критерия хи-квадрат при числе степеней свободы, равном единице. Модифицированное значение суммы координат входного сигнала определяют по формуле
(4).
В пятом варианте сумму координат не меняют.
В зависимости от значения управляющего сигнала S имеется четыре варианта определения порога генерации сигнала команды.
В первом варианте порог изменяют в зависимости от статистического прогноза превышения вероятности получения сигнала награды при условии генерации сигнала команды над вероятностью получения сигнала награды в отсутствии сигнала команды. Вероятности и число степеней свободы рассчитывают по формулам
м+п++ + 1
М 2
п++ + п+-+2
.,-П + +1
М 2
п + п
+ 2
N2 n+++ n+ + + n + 2.
Во втором варианте порог изменяют в зависимости от статистического прогноза превышения вероятности получения сигнала награды над вероятностью его отсутствия при условии генерации сигнала команды. Вероятности и число степеней свободы рассчитывают по формулам
М+2
п++ + 1 п++ + п+-+2
п + +1 п++ + п+-+2
(6)
№ п + п
(6)
В третьем варианте порог изменяют в зависимости от статистического прогноза
превышения доли сигналов награды, пришедших при условии генерации сигнала команды над долей сигналов награды, пришедших при условии отсутствия сигнала команды. Эти доли и число степеней свободы рассчитывают по формулам:
-++
1
n++ + n + +2
+ +1
п++ + п-++2
(7)
№ п + п
в формулах (5) - (7) учтено, что вероятности для незнакомого сигнала, который считается безразличным, принимаются равными 0,5. Аналогично предыдущему рассчитывают вероятность Р2 безошибочного
прогноза разности §2 М+2 - :
/./
где
т„
2мЈ м; мГ
Порог V изменяют в пределах V0 ± v:
V V0- vP2sgr Ј2.
В четвертом варианте порог оставляют
О ШЮ U U UIМ (
; генерации сь 1, если А V
неизменным.
Условие генерации сигнала команды
Y
О,иначе .
После прихода входного сигнала оценивают это условие, генерируют или не генерируют сигнал команды и принимают сигнал награды Х0 1 или Х0 0. Эти результаты запоминают и модель нейрона готова к приему следующего сигнала.
Устройство содержит входной двоичный счетчик 1, группу запоминающих блоков 2-5, двоичный счетчик 6, два мультиплексора 7 и 8, блок 9 элементов И, два триггера 10 и 11, три многовходовых сумматора 12, 13 и 14, сумматор 15 координат, два вычитателя 16 и 17 и сумматор 18, два блока 19 и 20 определения вероятности, блок 21 критерия достоверности, блок 22 определения безошибочной вероятности, два регистра 23, 24, блок 25 коммутации, блок 26 управления и дешифратор 27.
Устройство работает следующим образом.
При включении питания и запуске устройства блок 26 управления вырабатывает сигнал R, который приводит в исходное, т.е. нулевое состояние, содержимое счетчика 6. Кроме того, блок 26 управления вырабатывает импульсный сигнал tR для записи кода режима работы устройства, поступающего из внешней среды с шины S в регистр 23. Затем блок 26 управления генерирует последовательность импульсов ten, увеличивающих содержимое счетчика 1, выходы которого являются адресными входами за- поминающих блоков 2-5 с нуля до максимального значения, а также сигнал ts для записи единицы в счетчик 6. Кроме того, сигналы t3i, t32, tsa, t34 из блока 26 управления поступают на одноименные входы уп- равления запоминающих блоков 2, 3, 4 и 5 для записи содержимого счетчика 6 в ячейки памяти по адресам, генерируемым счетчиком 1. Блок 26 управления при получении сигнала Р из счетчика 1, говорящего о его переполнении, заканчивает приведение устройства в исходное состояние, которому соответствует содержимое всех ячеек памяти запоминающих блоков 2, 3, 4 и 5,тожде- ственно равное единице. Это необходимо для того, чтобы учесть, что соответствующие математические ожидания случайных многомерных сигналов Хк, поступающих в дис- кретные моменты времени на вход устройств, равны 0,5.
В дискретный момент времени по сигналу ti, генерируемому блоком 26 управления, многомерный входной сигнал Хк (Xi) iXi, Х2, ..., Хг , поступающий из внешней среды, записывается, а счетчик 1, где Xi }0,1j , r - число координат, ti + 1 - ti const. Одновременно с сигналом tl блок 26 управления генерирует сигнал чтения Тчт, поступающий на одноименные входы соответствующих заломи- нающих блоков 2 - 5. По сигналу tm происходит считывание содержимого ячеек памяти запоминающих блоков 2 - 5 по адресу Хк(й), записанному в счетчик 1, при этом из блока 2 считывается число - число случаев, когда после прихода сигнала Хк генерировалась команда Y 1 в момент времени ti + 1 на выходе устройства и поступала награда N 1 в момент времени ti + 2,
гдеУ- {0,1Ј,Ы-{0,1},а 1 1,2,3Из
блока 3 считывается число п+ - число случаев, когда после прихода сигнала X устройством генерировалась команда Y 1, но на вход N не поступала награда, N 0. Из блока 4 считывается число п - число случаев, когда после прихода сигнала Хк команда Y не вырабатывалась, а награда N поступала. Из блока 5 считывается число п - число случаев, когда после прихода сигнала Хк команда Y устройством не вырабатывалась, т.е. Y 0, и не поступала на вход N, награда N 0. Т.е. каждому входному многомерному сигналу Хк соответствует определенная строка 2-5 блоков.
За интервал времени, равный ti + 1 - ti - const, после прихода и записи в счетчик 1 многомерного входного сигнала XK(tl), рассчитываются вероятности прихода в момент времени ti + 2 на вход устройства N награды, как при условии генерации команды Y(ti + 1), так и без ее генерации на выходе устройства.
В зависимости от значения кода режима работы устройства (значения управляющего сигнала S) на входы многовходовых сумматоров 12, 13 и 14 поступают числа, считываемые из соответствующих блоков 2- 5. Блок 25 коммутации, управляя работой блока 9 элементов И, подключает в зависимости от значения кода режима работы устройства, к многовходовым сумматорам те или иные выходы блоков 2-5, При значении управляющих сигналов блока 25 коммутации, равном лог. 1, соответствующий выход блоков 2-5 подключается ко входу многовходового сумматора, а при значении управляющих сигналов, равном лог. О, на вход подается число тождественно равное О.
Вычитатель определяет величину и знак разности вычисленных в блоках 19, 20 определения вероятностей значений математических ожиданий Ј М+ - М, а блок 21 критерия достоверности рассчитывает значение критерия
г2М
ь
N
который необходим при определении вероятности Р безошибочного прогноза разности математических ожиданий М+ и М блоком 22 определения безошибочной вероятности. Вычисленное блоком 22 определения безошибочной вероятности значение vP2sgnЈ 2 при модификации порога, или
aPi sgn Ј2 при модификации суммы координат входного сигнала поступает на сумматор 18 для изменения порога или суммы координат.
За интервал времени ti - ш, когда значение сигнала ш, вырабатываемого блоком 26 управления, тождественно равно 0, производится модификация суммы координат входного сигнала, вырабатываемого сумматором 15 координат. Полученное на выходе сумматора измененное значение суммы координат входного сигнала
-±Ј
1
Xi.
на величину aPi sgn Ј1 записывается в регистр 24 по сигналу tp, вырабатываемому блоком 26 управления.
За интервал времени twi - ti + 1, когда значение сигнала tM 1, производится модификация порога генерации сигнала команды
V V0 - vP2sgn §2,
где V0 const - заранее заданный порог генерации команды, поступающий на сумматор 18 через мультиплексор 8.
Условие генерации команды Y(ti + 1) на выходе устройства в соответствии с описанным способом моделирования нейрона определяется по формуле
/ 1, если А V Y-0. иначе
Вычитатель 17, на первый вход которого приходит модифицированный порог V из сумматора 18, а на второй - модифицированная сумма координат А, производит их сравнение. Если разность А - V 0, то знак числа на выходе вычитателя 17 равен нулю, в противном случае - единице. По сигналу ti + 1, генерируемому блоком 26 управления, знак числа записывается в триггер 11, инверсный вход которого является выходом Y устройства, а также одним из входов дешифратора 27 и одного из управляющих входов мультиплексора 7. Значение Y 1 говорит о генерации команды устройством в момент времени ti + 1, а значение Y 0 об ее отсутствии.
В дискретный момент времени ti + 2 по сигналу ti + 2, генерируемому блоком 26 управления, на триггер 10 записывается значение награды N(ti + 1). Выход триггера 10 соединен со вторым входом дешифратора 27, который в зависимости от сочетания входных сигналов Y(ti + 1) и N(tl + г) генерирует значение 1 на одном из своих выходов, а на других - значение О. Выходы дешифратора 27 подключены к соответствующим входам блока 26управления, который в зависимости от их информационного значения генерирует или нет один из сигналов
t31, t32, t33, t34.
0 Мультиплексор 7, управляемый выходом триггера 10 и выходом триггера 11, под- ключает информационный вход запоминающих блоков 2-5, по сигналу ti + 2 в счетчик 6 записывается содержимое ячей5 ки памяти, выбираемой по адресу Хк, а по сигналу ta из блока 26 управления к содержимому счетчика 6 прибавляется единица, после чего его содержимое записывается в соответствующий запоминающий блок по
0 адресу Xx(ti). После того, как ячейкой памяти одного из четырех блоков 2-5 по адресу XK(ti) была проведена запись содержимого счетчика 6, устройство готово к новому циклу приема многомерного сигнала Хк(и) генера5 ции команды Y и приему награды N. Формула изобретения
0 нахождении суммы координат поступившего входного сигнала, модификации порога сигнала на основе использования оценок событий в связи с поступившим входным сигналом, запоминании фактов генерации
5 сигнала команды и получении сигнала награды, отличающийся тем, что, с целью расширения функциональных возможностей на основе использования прошлого опыта, поступившим входным сигналом мо0 дифицируют сумму координат входного сигнала и генерируют сигнал команды в зависимости от разницы между величиной модифицированной суммы координат сигнала и величиной модифицированного по5 рога, а оценки событий производятся в зависимости от значимости превышения вероятности получения сигнала награды над вероятностью отсутствия этого сигнала при учете условий генерации сигнала команды и
0 получения сигнала награды, при превышении доли случаев с отсутствием сигнала награды при условии отсутствия сигнала команды над соответствующей долей при условии генерации сигнала команды, либо
5 от значимости тетрахоического показателя связи фактов наличия или отсутствия сигнала команды.
2,Устройство для моделирования нейрона, имеющее два информационных входа Хк и N, первый из которых предназначен для
приема многомерных сигналов среды, а второй - для приема сигнала награды, один выход Y - выход сигнала команды, и содержащее первый счетчик, вход которого является первым входом устройства, четыре запоминающих блока, адресные входы которых соединены с информационным выходом первого счетчика, второй счетчик, информационный выход которого соединен с входом данных первого запоминающего блока, первый и второй вычитатели, первый триггер, вход которого соединен с выходом первого вычитателя, а выход является выходом устройства, второй триггер, вход которого является вторым входом устройства, дешифратор, первый вход которого соединен с выходом первого триггера, а второй вход - с выходом второго триггера, блок управления, входы которого соединены с выходами дешифратора и выходом переполнения первого счетчика, а выходы блока управления - с первым и вторым тактовыми входами каждого запоминающего блока, с тактовыми входами и входами обнуления первого и второго счетчиков, а также тактовыми входами первого и второго триггеров, отличающееся тем, что, с целью расширения функциональных возможностей путем увеличения разнообразия поведенческих парадигм, в него введены первый и второй мультиплексоры, блок элементов И, первый, второй и третий многовходные сумматоры, первый и второй блоки определения вероятности, блок определения безошибочной вероятности и блок определения критерия достоверности, сумматор координат, сумматор, первый и второй регистры, блок коммутации, причем третий информационный вход устройства, предназначенный для приема многомерного сигнала среды S, является первым входом первого регистра, информационный выход первого счетчика соединен с входом сумматора координат, а выход первого мультиплексора соединен с входом первого счетчика, выход которого соединен входом данных второго, третьего и четвертого запоминающих блоков, а выходы данных четырех запоминающих блоков - с информационными входами первого мультиплексора и информационными входами блока элементов И, выходы которого соединены с первым, вторым, третьим и четвертым входами каждого из трех многовходовых сумматоров, выход первого многовходового сумматора соединен с входом первого и второго
блоков определения вероятности, и с входом блока определения безошибочной вероятности, выходы второго и третьего многовходовых сумматоров соединены с входами соответственно первого и второго
блоков определения вероятности, выходы которых соединены с первым и вторым входами второго вычитателя и с входом блока определения критерия достоверности, выход которого соединен с входом блока определения безошибочной вероятности, а выход второго вычитателя соединен с входом блока определения критерия достоверности и входом блока определения безошибочной вероятности, выход которого
соединен с первым входом сумматора, выход сумматора соединен с первым входом первого вычитателя и информационным входом второго регистра, а второй вход сумматора соединен с выходом второго мультиплексора, первый вход которого соединен с выходом сумматора координат входного сигнала, а второй вход - с источником опорного напряжения, выход второго регистра соединен с вторым входом первого вычитателя, выход первого регистра соединен с первым входом блока коммутации, выход которого соединен с управляющим входом блока элементов И, выходы первого и второго триггеров соединены с первым и вторым
управляющими входами первого мультиплексора, а второй вход блока коммутации, управляющий вход второго мультиплексора и тактовые входы первого и второго регистров соединены с соответствующими тактовыми и управляющими выходами блока управления.
«а.
ЛДЈЗч.
S
S
I
| Способ моделирования нейрона и устройство его осуществления | 1988 |
|
SU1589296A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
