Изобретение относится к способу и системам управления летательными аппаратами, вращающимися по углу крена, и может быть использовано в системах управления ракетами, формирующими на борту команды управления.
Известен способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой, основанная на нем [Патент РФ №2282129, МКИ7 F41G 7/00, 14.12.04], выбранные в качестве прототипов. Известный способ формирования команд управления на ракете, вращающейся по углу крена, включает формирование сигнала вращения датчиком угла крена, декодирование принимаемых командных сообщений и последующую выработку из них сигналов управления ракетой по курсу и тангажу, при котором сигнал с датчика крена преобразуют в линеаризированный сигнал, который с учетом угла крена ракеты сравнивают с сигналами декодированных значений командных сообщений соответственно по курсу и тангажу, по результатам сравнения формируют сигналы команд управления ракетой в виде широтно-импульсного модулированного сигнала, при этом величину размаха линеаризованного сигнала устанавливают независимой от длительности сигнала вращения.
Известная система управления ракетой, вращающаяся по углу крена, использующая этот способ, содержит преобразователь координат, датчик крена, силовой привод, а также последовательно включенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, первый и второй выходы которой соединены соответственно с первым и вторым входами преобразователя координат, в нее введены логическая схема «исключающее ИЛИ», линеаризатор сигнала и релейный элемент, при этом третий и четвертый входы преобразователя координат соединены соответственно с первым и вторым входами логической схемы «исключающее ИЛИ» и с первым и вторым входами датчика крена, выход логической схемы «исключающее ИЛИ» соединен со входом линеаризатора сигнала, при этом выход преобразователя координат соединен с первым входом релейного элемента, второй вход которого подключен к выходу линеаризатора сигнала, а выход релейного элемента подключен ко входу силового привода.
Недостатком известных способа формирования команд управления на ракете, вращающейся по углу крена, и системы управления ракетой, вращающейся по углу крена, реализующей способ, является недостаточно высокая точность формирования команд управления из-за того, что величина текущей команды управления вырабатывается по длительности предыдущего временного интервала, при этом изменение угловой скорости вращения ракеты по крену определяют с опозданием.
Известен способ формирования синусоидального сигнала и устройство его реализующее [У.Титце, К.Шенк "Полупроводниковая схемотехника", М., Мир, 1983 г., стр.453-454, рис.24.18, 24.19, табл.24.2], которые могут применяться в качестве преобразователя одной координаты в системах управления ракетами. В известном способе формирования синусоидального сигнала считают количество импульсов и формируют из них двоичное число, изменяемое от 0 до 15, несущее информацию о величине угла, из которого вырабатывают коммутирующие сигналы, формирующие из входного сигнала (два разнополярных идентичных источников питания) 16-ступенчатую аппроксимацию синусоиды.
Известное устройство, его реализующее, содержит счетчик импульсов, первый и третий выходы которого соединены с первым и вторым входами первой логической схемы "исключающее ИЛИ", а второй и третий выходы - с первым и вторым входами второй логической схемы "исключающее ИЛИ", при этом выходы первой и второй логических схем "исключающее ИЛИ" соединены соответственно с первым и вторым входами перемножителя, а четвертый выход счетчика импульсов соединен с третьим входом перемножителя. При этом перемножитель содержит коммутирующее устройство (аналоговый перемножитель), два делителя напряжения на резисторах и два источника сигнала, задающих амплитуды выходного сигнала (+5 В и -5 В).
Недостатком известных способа формирования синусоидального сигнала и устройства, его реализующего, используемого в качестве преобразователя, является недостаточно высокая точность из-за применения в перемножителе двух делителей напряжения при наличии лишь одного канала (синусоидального).
Задачей предлагаемой группы изобретений является повышение точности формирования команд управления (например, в аналоговом виде) за счет получения непосредственно текущего (без задержки) сигнала углового положения, независимого от изменения скорости вращения ракеты по углу крена.
Поставленная задача решается за счет того, что в способе формирования команд управления на ракете, вращающейся по углу крена, при котором декодируют принимаемые сигналы, с последующей выработкой из них команд управления ракетой по курсу и тангажу, измеряют и интегрируют по времени (ti) скорость вращения ракеты по углу крена (ωi), при достижении величины размаха интегрированного сигнала, равной заданной величине, формируют устанавливающие импульсы, при этом каждым устанавливающим импульсом устанавливают интегратор в исходное состояние, а затем вновь интегрируют текущую величину ωi, из устанавливающих импульсов вырабатывают коммутирующие сигналы, которыми преобразуют декодированные сигналы в команды управления ракетой по курсу и тангажу в виде многоступенчатой аппроксимации синусоиды и косинусоиды с амплитудами, соответствующими величинам декодированных сигналов, и периодом повторения, равным периоду вращения ракеты по углу крена.
Система управления ракетой, вращающейся по углу крена, реализующая способ формирования команд на ракете, вращающейся по углу крена, содержит рулевой привод, последовательно включенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, в нее введены датчик угловой скорости, устройство установки в исходное состояние, задатчик углового интервала, сбрасываемый интегратор и синус-косинусный преобразователь, при этом выход датчика угловой скорости соединен с интегрирующим входом сбрасываемого интегратора, задающий вход которого подключен к задатчику углового интервала, устройство установки в исходное состояние соединено со входами установки в исходное состояние сбрасываемого интегратора и синус-косинусного преобразователя, счетный вход которого соединен с выходом сбрасываемого интегратора, выходы аппаратуры разделения каналов и декодирования по курсу и тангажу соединены соответственно с курсовым и тангажным входами синус-косинусного преобразователя, первый и второй выходы которого соединены соответственно с первым и вторым входами рулевого привода.
Способ преобразования импульсов на ракете, вращающейся по углу крена для преобразования координат на ракете, включающий подсчет количества импульсов и формирование из них двоичного числа, изменяемого от 0 до 15, и выработку из него коммутирующих импульсных сигналов, формирующих из первого входного сигнала 16 - ступенчатую аппроксимацию синусоидального сигнала, при этом вырабатывают дополнительный коммутирующий импульсный сигнал, который из второго входного сигнала формирует 16 - ступенчатую аппроксимацию косинусоидального сигнала, причем в качестве первого и второго входных сигналов используют декодированные сигналы соответственно по курсу и тангажу, а в качестве импульсов - креновые импульсы, период повторения которых равен 1/16 периода вращения ракеты по углу крена.
Синус-косинусный преобразователь системы управления ракетой, вращающейся по углу крена, содержащий первый перемножитель и счетчик импульсов, первый и третий выходы которого соединены с первым и вторым входами первой логической схемы "исключающее ИЛИ", а второй и третий выходы - с первым и вторым входами второй логической схемы "исключающее ИЛИ", при этом выходы первой и второй схем "исключающее ИЛИ" соединены соответственно с первым и вторым входами первого перемножителя, третий вход которого соединен с четвертым выходом счетчика импульсов, в него введены третья логическая схема "исключающее ИЛИ" и второй перемножитель, первый и второй входы которого соединены с выходами первой и второй логических схем "исключающее ИЛИ", при этом третий и четвертый выходы счетчика импульсов соединены соответственно с первым и вторым входами третьей логической схемы "исключающее ИЛИ", выход которой соединен с третьим входом второго перемножителя, причем входами синус-косинусного преобразователя являются вход установки в исходное состояние счетчика импульсов, подсоединяемый к выходу устройства установки в исходное состояние, счетный вход счетчика импульсов, соединяемый с выходом сбрасываемого интегратора, курсовой вход первого перемножителя и тангажный вход второго перемножителя, соединяемые соответственно с выходами аппаратуры разделения каналов и декодирования, а выходами синус-косинусного преобразователя - выходы первого и второго перемножителей, соединяемые с первым и вторым входами рулевого привода.
Заявленный способ формирования команд управления на ракете, вращающейся по углу крена, реализуется следующим образом. С момента старта ракета вращается по углу крена, при этом на ней измеряют скорость вращения ракеты по углу крена ω. Поскольку угол крена ракеты (φ) равен

где φ0 - начальный угол крена,
t - время.
Разбивая креновый период на n интервалов, в каждом из которых φi=const, получим

Поскольку величина напряжения на выходе датчика угловой скорости прямо пропорциональна величине угловой скорости, то, интегрируя это напряжение во времени (ti), получим интегрированный сигнал. При достижении величины интегрированного сигнала (его размаха), равной заданной (требуемой) величине, соответствующей величине φi=const, формируют устанавливающий импульс, который устанавливает интегратор в исходное состояние. После чего процесс интегрирования повторяют вновь.
Таким образом, на выходе интегратора сформируется многократно повторяющийся интегрированный сигнал, длительность которого соответствует равным угловым интервалам, в которых относительное изменение величины времени итерирования (ti) обратно пропорционально относительному изменению величины угловой скорости вращения ракеты по углу крена (ωi).
Из устанавливающих импульсов вырабатывают коммутирующие сигналы в виде импульсов, например в двоичном параллельном коде. Эти импульсы преобразуют декодированные сигналы в команды управления ракетой по курсу и тангажу в виде многоступенчатой аппроксимации синусоиды и косинусоиды, например в аналоговом виде с амплитудами по курсу и тангажу, соответствующими величинам декодированных сигналов, и периодом повторения, равным периоду вращения ракеты по углу крена.
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1-3. На фиг.1 и 2 представлены структурные электрические схемы системы управления ракетой, вращающейся по углу крена и синус-косинусного преобразователя, где 1 - датчик угловой скорости (ДУС); 2 - устройство установки в исходное состояние (УУ); 3 - приемник (П); 4 - аппаратура разделения каналов и декодирования по курсу и тангажу (АРКД); 5 - сбрасываемый интегратор (СИ); 6 - интегратор (ИН); 7 - логическая схема " ИЛИ" (ИЛИ); 8 - синус-косинусный преобразователь (СКП); 9 - задатчик углового интервала (ЗУИ); 10 - компаратор (К); 11 - рулевой привод (РП); 12 - счетчик импульсов (СТ); 13а, 13б и 13в - соответственно первая, вторая и третья логические схемы "исключающие ИЛИ" (ИС1, ИС2 и ИСЗ); 14а и 14б - соответственно первый и второй перемножители (П1 и П2); 15а и 15б - соответственно первый и второй делители напряжения (ДН1 и ДН2); 16а и 16б - соответственно первый и второй мультиплексоры (МП1 и МП2); 17а и 17б - соответственно первый и второй коммутаторы (КМ1 и КМ2); 18а и 18б - соответственно первый и второй инверторы (ИН1 и ИН2); 19а и 19б - соответственно первый и второй сумматоры (СУМ1 и СУМ2).
На фиг.3 приведены эпюры сигналов, где представлены: "а" - сигнал на выходе интегратора 6 (в аналоговом виде, например, на выходе цифроаналогового преобразователя); "б" - сигнал на выходе компаратора 10; "в1", "в2", "в3" и "в4" - сигналы соответственно на первом, втором, третьем и четвертом выходах счетчика импульсов 12; "г", "д" и "з" - сигналы на выходах соответственно первой, второй и третьей логических схем "исключающие ИЛИ" 13а, 13б и 13в; "е" и "ж" - сигналы на выходах соответственно первого и второго мультиплексоров 16а и 16б; "и" и "к" - сигналы на выходах соответственно первого и второго сумматоров 19а и 19б.
В системе управления ракетой, вращающейся по углу крена, последовательно включены приемник 3 и аппаратура разделения каналов и декодирования по курсу и тангажу 4. Выход датчика угловой скорости 1 соединен с интегрирующим входом сбрасываемого интегратора 5, задающий вход которого подключен к задатчику углового интервала 9. Устройство установки в исходное состояние 2 соединено со входами установки в исходное состояние сбрасываемого интегратора 5 и синус-косинусного преобразователя 8. Выход сбрасываемого интегратора 5 соединен со счетным входом синус-косинусного преобразователя 8. Выход аппаратуры разделения каналов и декодирования по курсу и тангажу 4 соединен соответственно с курсовым и тангажным входом синус-косинусного преобразователя 8. Первый и второй выходы синус-косинусного преобразователя 8 соединены соответственно с первым и вторым входами рулевого привода 13.
Датчик угловой скорости 1 может быть выполнен как микромеханический датчик, объединяющий на одном кремниевом кристалле датчик угловой скорости и электронику [«Электронные компоненты», №2, 2003 г., стр.57-59]. Устройство установки в исходное состояние 2 может быть выполнено как устройство по патенту РФ №2220401. Приемник 3, аппаратура разделения каналов и декодирования по курсу и тангажу 4 и рулевой (силовой) привод 11 могут быть выполнены, как в прототипе [патент РФ №2282129].
Пример выполнения сбрасываемого интегратора 5 приведен на фиг.1. Сбрасываемый интегратора 5 содержит последовательно включенные интегратор 6, компаратор 10 и логическую схему "ИЛИ" 7, выход которой соединен со входом установки в исходное состояние интегратора 6. Интегратор 6 может быть выполнен, как в прототипе [патент РФ №2282129]. Логическая схема "ИЛИ" 7, например микросхема 564ЛА7, компаратор 10, например микросхема 564ИП2.
Задатчик углового интервала 9 представляет собой формирователь двоичного числа, например в параллельном коде. Счетчик импульсов 12, например микросхема 564ИЕ10. Первая 13а, вторая 13б и третья 13в логические схемы "исключающие ИЛИ" - микросхема 564ЛП2, первый 16а и второй 16б мультиплексоры - микросхема 564КП1, первый 22а и второй 22б коммутаторы - микросхема 564КП1. Первый 18а и второй 18б инверторы, например на операционном усилителе с коэффициентом передачи минус 1. Первый 19а и второй 19б сумматоры, например на операционном усилителе.
Система управления ракетой, вращающейся по углу крена (фиг.1), реализующая способ формирования команд управления на ракете, вращающейся по углу крена, работает следующим образом. В первоначальный момент времени (перед стартом ракеты) при выходе на рабочий режим бортового источника питания устройство установки в исходное состояние 2 формирует разовый импульс, устанавливающий по "R" входу синус-косинусный преобразователь 8 (по "R" входу счетчика импульсов 12) и интегратор 6 (через логическую схему "ИЛИ" 7) в исходные состояния. С момента схода ракеты она начинает вращаться по углу крена, и датчик угловой скорости 1 формирует электрический сигнал, величина которого прямо пропорциональна угловой скорости вращения ракеты по углу крена. Этот сигнал поступает на информационный вход сбрасываемого интегратора 5 и, в частности, на вход интегратора 6, на выходе которого формируется интегрированное напряжение (эпюра "а" на фиг.3), которое поступает на первый вход компаратора 10. На второй вход компаратора 10 поступает напряжение с выхода задатчика углового интервала 9, величина которого (порог срабатывания, равный ЕП), соответствует ωiti=22°30′ (эпюра "б" на фиг.3).
При достижении величины размаха (в данном случае амплитуды) на первом входе компаратора 10, равной величине напряжения ЕП на его выходе, установится единичный логический уровень (эпюра "б" на фиг.3). Этот уровень через логическую схему "ИЛИ" 7 установит интегратор 6 вновь в исходное состояние (эпюра "а" на фиг.3), которое сформирует на выходе компаратора 10 вновь уровень логического нуля, при этом образуется импульс (эпюра "б" на фиг.3).
Таким образом, на выходе сбрасываемого интегратора 5 формируются устанавливающие импульсы с периодом повторения ωiti=22°30′ (эпюра "б" на фиг.3), т.е. 16 импульсов за креновый период (0°…360°).
Эти импульсы поступают на счетный вход синус-косинусного преобразователя 8, т.е. на вход "V" счетчика импульсов 12 (фиг.2), по выходу которого на его четырех разрядах формируются сигналы (эпюры "в1"…"в4" фиг.3).
При поступлении на вход приемника 3 сигналов на его выходе сформируется сигнал, например в виде электрических импульсов с ВИМ, которые поступают на вход аппаратуры разделения каналов и декодирования 4. С выхода аппаратуры 4 декодированные сигналы по курсу "Z" и тангажу "Y", например через соответствующий фильтр, корректирующий фазу этих сигналов (в аппаратуре 4), поступают соответственно на курсовой и тангажный входы синус-косинусного преобразователя 8, на первом и втором выходах которого сформируются две команды управления UZ·sinω·t и UY·cosω·t (эпюры "и" и "к" на фиг.3). Эти две команды управления ракетой поступают соответственно на первый и второй входы рулевого привода 11, который отрабатывает их в виде

Заявленный способ преобразования координат на ракете, вращающейся по углу крена, реализуется следующим образом. Считают количество импульсов и формируют из них периодически повторяющееся двоичное число в параллельном коде, изменяемое от 0 до 15, т.е. имеющее 16 дискретных значений. Из этих дискретных значений (соответствующих им логическим уровням) вырабатывают импульсные коммутирующие сигналы, формирующие из первого входного сигнала 16-ступенчатую аппроксимацию синусоидального сигнала.
Вырабатывают дополнительный коммутирующий импульсный сигнал, который с помощью ранее сформированных коммутирующих импульсов формирует из второго входного сигнала 16-ступенчатую аппроксимацию косинусоидального сигнала. При этом в качестве первого и второго входных сигналов используют декодированные сигналы соответственно по курсу "Z" и тангажу "Y". В качестве импульсов используют креновые импульсы, например устанавливающие (как в заявленном способе формирования команд управления на ракете, вращающейся по углу крена), период повторения которых равен 1/16 периода вращения ракеты по углу крена.
Синус-косинусный преобразователь 8, реализующий заявленный способ преобразования координат, приведен на фиг.2, где первый и третий выходы счетчика импульсов 12 соединены соответственно с первым и вторым входами первой логической схемы "исключающее ИЛИ" 13а. Второй и третий выходы счетчика импульсов 12 соединены с первым и вторым входами второй схемы "исключающее ИЛИ" 13б. Выходы первой 13а и второй 13б схем "исключающее ИЛИ" соединены соответственно с первым и вторым входами первого перемножителя 14а. Четвертый выход счетчика импульсов 12 соединен с третьим входом первого перемножителя 14а. Первый и второй входы второго перемножителя 14б соединены с выходами первой 13а и второй 13б логических схем "исключающее ИЛИ". Третий и четвертый выходы счетчика импульсов 12 соединены соответственно с первым и вторым входами третьей логической схемы "исключающее ИЛИ" 13в, выход которой соединен с третьим входом второго перемножителя 14б. Вход установки в исходное состояние счетчика импульсов 12 подключен к выходу устройства установки в исходное состояние 2. Счетный вход счетчика импульсов 12 соединен с выходом сбрасываемого интегратора 5. Курсовой вход первого перемножителя 14а и тангажный вход второго перемножителя 14б соединены соответственно с выходами по курсу и тангажу аппаратуры разделения каналов и декодирования 4. Выходы первого 14а и второго 14б перемножителей соединены с первым и вторым входами рулевого привода 11.
Синус-косинусный преобразователь 8, приведенный на фиг.2, работает следующим образом. В первоначальный момент времени при выходе источника питания на рабочий режим устройство установки в исходное состояние 2 формирует разовый импульс, который поступает на "R" вход счетчика импульсов 12, и выставляют на его выходах нулевые логические уровни.
Креновые импульсы с первого и третьего выходов (разрядов) счетчика импульсов 12 поступают соответственно на первый и второй входы первой логической схемы "исключающее ИЛИ" 13а, на выходе которой сформируется импульсный сигнал, приведенный на эпюре "г" фиг.3. Креновые импульсы со второго и третьего выходов (разрядов) счетчика импульсов 12 поступают соответственно на первый и второй входы второй логической схемы "исключающее ИЛИ" 13б, на выходе которой сформируется импульсный сигнал, приведенный на эпюре "д" фиг.3.
Креновые импульсы с третьего и четвертого выходов (разрядов) счетчика импульсов 12 поступают на соответственно на первый и второй входы третьей логической схемы "исключающее ИЛИ" 13в. Из этих импульсов на ее выходе сформируется импульсный сигнал, приведенный на эпюре "з" фиг.3, который сдвинут по фазе на 90° относительно сигнала на четвертом выходе (старшем разряде) счетчика импульсов 12 (эпюра "в4" на фиг.3).
Декодированные сигналы по курсу и тангажу с выходов аппаратуры разделения каналов и декодирования 4 поступают на входы по курсу "Z" и тангажу "Y" соответственно, например первого 14а и второго 14б перемножителей, а именно на входы первого 15а и второго 15б делителей напряжения. В соответствии с рекомендациями [У.Титце, К.Шенк "Полупроводниковая схемотехника", М., Мир, 1983 г., стр.453-454, табл.24.2] выбраны коэффициенты передачи обеих резисторных делителей напряжения 0,20, 0,56, 0,83 и 0,98. Для упрощения реализации вместо коэффициента 0,98 взят коэффициент, равный 1. С учетом изложенного, коэффициенты будут равны 0,20/0,98≈0,204; 0,56/0,98≈0,571; 0,83/0,98≈0,847 и 0,98/0,98=1.
Для формирования двух сигналов, сдвинутых на 90° (синусоидального и косинусоидального), место соединения выхода аппаратуры 4 и резистора R1, резисторов R1 и R2, резисторов R2 и R3 и резисторов R3 и R4 подключены соответственно к 1, 2, 3 и 4 входам четырехканального мультиплексора 21а (входы "X1", "X2", "Х3" и "Х4"), например в канале курса "Z" и к 4, 3, 2 и 1 входам четырехканального мультиплексора 21б в канале тангажа "Y".
На первые входы (младшие разряды) управления мультиплексоров 16а и 16б ("A1") поступает сигнал с первой логической схемы "исключающее ИЛИ" 13а (эпюра "г" на фиг.3), а на вторые входы (старшие разряды) мультиплексоров 16а и 16б ("А2") поступает сигнал со второй логической схемы "исключающее ИЛИ" 13б (эпюра "д" на фиг.3). На выходах мультиплексоров 16а и 16б сформируются два соответствующих 4-уровневых сигнала, сдвинутых относительно друг друга на 90° (эпюры "е" и "ж" на фиг.3), амплитуды которых, например, одинаковы и соответствуют величинам сигналов на входах делителей напряжения 15а и 15б.
Сигнал с выхода первого мультиплексора 16а поступает на вход первого коммутатора 17а (например вход "X" мультиплексора), а с его первого выхода ("X1") через первый инвертор 18а с коэффициентом передачи по напряжению минус 1 подается на первый вход первого сумматора 19а, на второй вход которого поступает сигнал со второго выхода ("Х2") первого коммутатора 17а. Выходы первого коммутатора 17а поочередно переключаются сигналом с четвертого выхода счетчика импульсов 12, подаваемого на вход управления ("A1") первого коммутатора 17а. В случае использования в качестве коммутатора микросхемы мультиплексора 564КП1 его второй вход ("A2") закорачивают на корпус.
Таким образом, на выходе первого сумматора 19а сформируется сигнал (эпюра "и" на фиг.3), представляющий 16-ступенчатую аппроксимацию синусоиды. Аналогично формируется сигнал на выходе второго сумматора 19б (эпюра "к" на фиг.3), представляющий 16-ступенчатую аппроксимацию косинусоиды.
Следовательно, предлагаемая группа изобретений способ формирования команд управления на ракете, вращающейся по углу крена и система управления ракетой, вращающейся по углу крена, а также способ преобразования координат и синус-косинусный преобразователь позволяют повысить точность формирования команд управления на ракете за счет получения непосредственно сразу (без задержки) текущего сигнала, несущего информацию о величине угла крена ракеты, которая не зависит от изменения скорости вращения ракеты по углу крена, при значительном уменьшении габаритно-массовых характеристик, стоимости и повышения надежности системы управления ракетой за счет применения микромеханического датчика, измеряющего угловую скорость вращения ракеты вокруг своей оси.
Изобретение относится к области вооружения. Технический результат - повышение точности формирования команд управления. В способе формирования команд управления на ракете, вращающейся по углу крена, измеряют скорость вращения ракеты по углу крена и интегрируют ее по времени, формируют устанавливающие импульсы при достижении величины размаха интегрированного сигнала, равной заданной величине. Из устанавливающих импульсов вырабатывают коммутирующие сигналы, которыми преобразуют декодированные сигналы в команды управления ракетой по курсу и тангажу в виде многоступенчатой аппроксимации синусоиды и косинусоиды с амплитудами, соответствующими величинам декодированных сигналов, и периодом повторения, равным периоду вращения ракеты по углу крена. В систему управления ракетой, вращающейся по углу крена, введены датчик угловой скорости, устройство установки в исходное устройство, задатчик углового интервала, сбрасываемый интегратор и синус-косинусный преобразователь. Предложен способ преобразования импульсов для преобразования координат на ракете, при котором вырабатывают дополнительный коммутирующий импульсный сигнал, который из второго входного сигнала формирует 16-ступенчатую аппроксимацию косинусоидального сигнала, при этом в качестве первого и второго входных сигналов используют декодированные сигналы соответственно по курсу и тангажу, а в качестве импульсов - креновые импульсы, период повторения которых равен 1/16 периода вращения ракеты по углу крена. В синус-косинусный преобразователь введены третья логическая схема "исключающее ИЛИ" и второй перемножитель, что повышает точность формирования команд управления. 4 н.п. ф-лы, 3 ил.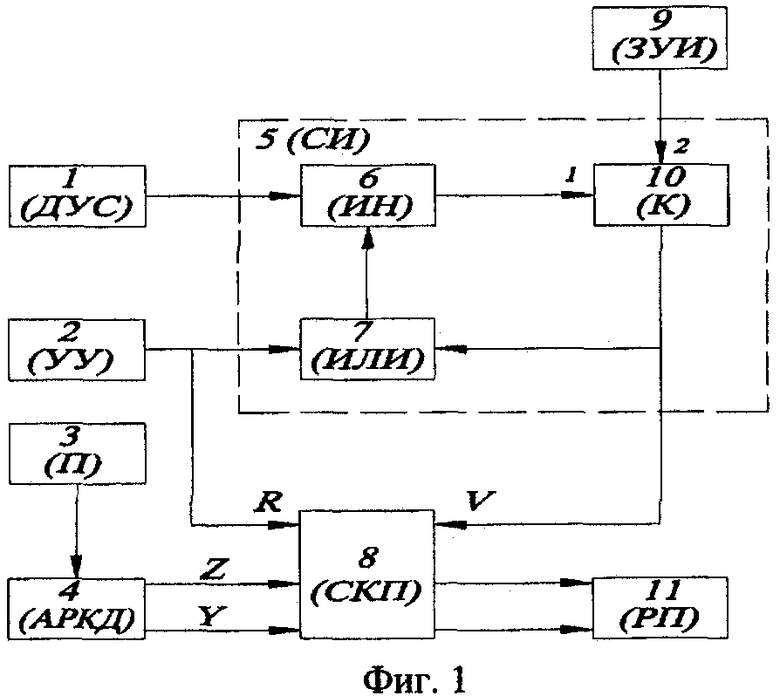
1. Способ формирования команд управления на ракете, вращающейся по углу крена, включающий декодирование принимаемых сигналов с последующей выработкой из них команд управления ракетой по курсу и тангажу, отличающийся тем, что измеряют и интегрируют по времени скорость вращения ракеты по углу крена (ωi), при достижении величины размаха интегрированного сигнала, равной заданной величине, формируют устанавливающие импульсы, при этом каждым устанавливающим импульсом устанавливают интегратор в исходное состояние, а затем вновь интегрируют текущую величину ωi, из устанавливающих импульсов вырабатывают коммутирующие сигналы, которыми преобразуют декодированные сигналы в команды управления ракетой по курсу и тангажу в виде многоступенчатой аппроксимации синусоиды и косинусоиды с амплитудами, соответствующими величинам декодированных сигналов, и периодом повторения, равным периоду вращения ракеты по углу крена.
2. Система управления ракетой, вращающейся по углу крена, содержащая рулевой привод, последовательно включенные приемник и аппаратуру разделения каналов и декодирования по курсу и тангажу, отличающаяся тем, что она снабжена датчиком угловой скорости, устройством установки в исходное состояние, задатчиком углового интервала, сбрасываемым интегратором и синус-косинусным преобразователем, при этом выход датчика угловой скорости соединен с интегрирующим входом сбрасываемого интегратора, задающий вход которого подключен к задатчику углового интервала, устройство установки в исходное состояние соединено со входами установки в исходное состояние сбрасываемого интегратора и синус-косинусного преобразователя, счетный вход которого соединен с выходом сбрасываемого интегратора, выходы аппаратуры разделения каналов и декодирования по курсу и тангажу соединены соответственно с курсовым и тангажным входами синус-косинусного преобразователя, первый и второй выходы которого соединены соответственно с первым и вторым входами рулевого привода.
3. Способ преобразования импульсов на ракете, вращающейся по углу крена, для преобразования координат на ракете, включающий подсчет количества импульсов и формирование из них двоичного числа, изменяемого от 0 до 15, и выработку из него коммутирующих импульсных сигналов, формирующих из первого входного сигнала 16-ступенчатую аппроксимацию синусоидального сигнала, отличающийся тем, что вырабатывают дополнительный коммутирующий импульсный сигнал, который из второго входного сигнала формирует 16-ступенчатую аппроксимацию косинусоидального сигнала, причем в качестве первого и второго входных сигналов используют декодированные сигналы соответственно по курсу и тангажу, а в качестве импульсов - креновые импульсы, период повторения которых равен 1/16 периода вращения ракеты по углу крена.
4. Синус-косинусный преобразователь системы управления ракетой, вращающейся по углу крена, содержащий первый перемножитель и счетчик импульсов, первый и третий выходы которого соединены с первым и вторым входами первой логической схемы "исключающее ИЛИ", а второй и третий выходы - с первым и вторым входами второй логической схемы "исключающее ИЛИ", при этом выходы первой и второй схем "исключающее ИЛИ" соединены соответственно с первым и вторым входами первого перемножителя, третий вход которого соединен с четвертым выходом счетчика импульсов, отличающийся тем, что в него введены третья логическая схема "исключающее ИЛИ" и второй перемножитель, первый и второй входы которого соединены с выходами первой и второй логических схем "исключающее ИЛИ", при этом третий и четвертый выходы счетчика импульсов соединены соответственно с первым и вторым входами третьей логической схемы "исключающее ИЛИ", выход которой соединен с третьим входом второго перемножителя, причем входами синус-косинусного преобразователя являются вход установки в исходное состояние счетчика импульсов, подсоединяемый к выходу устройства установки в исходное состояние, счетный вход счетчика импульсов, соединяемый с выходом сбрасываемого интегратора, курсовой вход первого перемножителя и тангажный вход второго перемножителя, соединяемые соответственно с выходами аппаратуры разделения каналов и декодирования, а выходами синус-косинусного преобразователя - выходы первого и второго перемножителей, соединяемые с первым и вторым входами рулевого привода.
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, СПОСОБ ФОРМИРОВАНИЯ ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ЛИНЕАРИЗАТОР СИГНАЛА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282129C1 |
| ТИТЦЕ У., ШЕНК К | |||
| Полупроводниковая схемотехника | |||
| - М.: Мир, 1983, стр.453-454, рис.24.18, 24.19, табл.24.2 | |||
| СИСТЕМА УПРАВЛЕНИЯ СНАРЯДАМИ | 2002 |
|
RU2218540C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

