| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения вала энергетической установки | 1989 |
|
SU1740734A1 |
| Автономная дизель-электрическая установка | 1987 |
|
SU1467732A1 |
| Автономная дизель-электрическая станция | 1988 |
|
SU1539954A1 |
| Электронный регулятор частоты вращения дизель-генератора с турбокомпрессором | 1985 |
|
SU1332052A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| АВТОНОМНАЯ ДВУХАГРЕГАТНАЯ ЭЛЕКТРОСТАНЦИЯ | 2019 |
|
RU2724104C1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1575262A2 |
| Автономная электроэнергетическая установка с синхронными дизель-генераторами | 1982 |
|
SU1128364A1 |
| Электронный регулятор частоты вращения дизель-генератора с турбокомпрессором | 1980 |
|
SU866254A1 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
Изобретение относится к электротехнике и может быть использовано в электроагрегатах с приводными тепловыми, двигателями, работакнцими при переменной частоте вращения. Цель изобретения - повышение качества генерируемой электроэнергии и экономичности. Установка содержит при- ; водной двигатель 2, генератор 1, регулятор частоты 3, датчики напряжения 11 и активной мощности 10, функциональный преобразователь 7 активной мощности нагрузки в сигнал, пропорциональный оптимальной частоте вращения двигателя, суммирующий усилитель 9, задатчик номинального напряжения 12 и сумматор 13. В установке обеспечивается работа приводного двигателя на скоростных режимах близких к оптимальным, что сни- « жает расход топлива. 7 ил. (Л
4 О5 VI vl
00
Изобретение относится к электротехнике, в частности к области автономных электроэнергетических систем, и может быть использовано в электроагрегатах с приводным тепловым двигателем и электрическим генератором, работающих при переменной частоте вращения, например в дизель- элейтрических агрегатах с асинхрони- зированными синхронными генераторами
Цель изобретения - повышение качества генерируемой электроэнергии и экономичности.
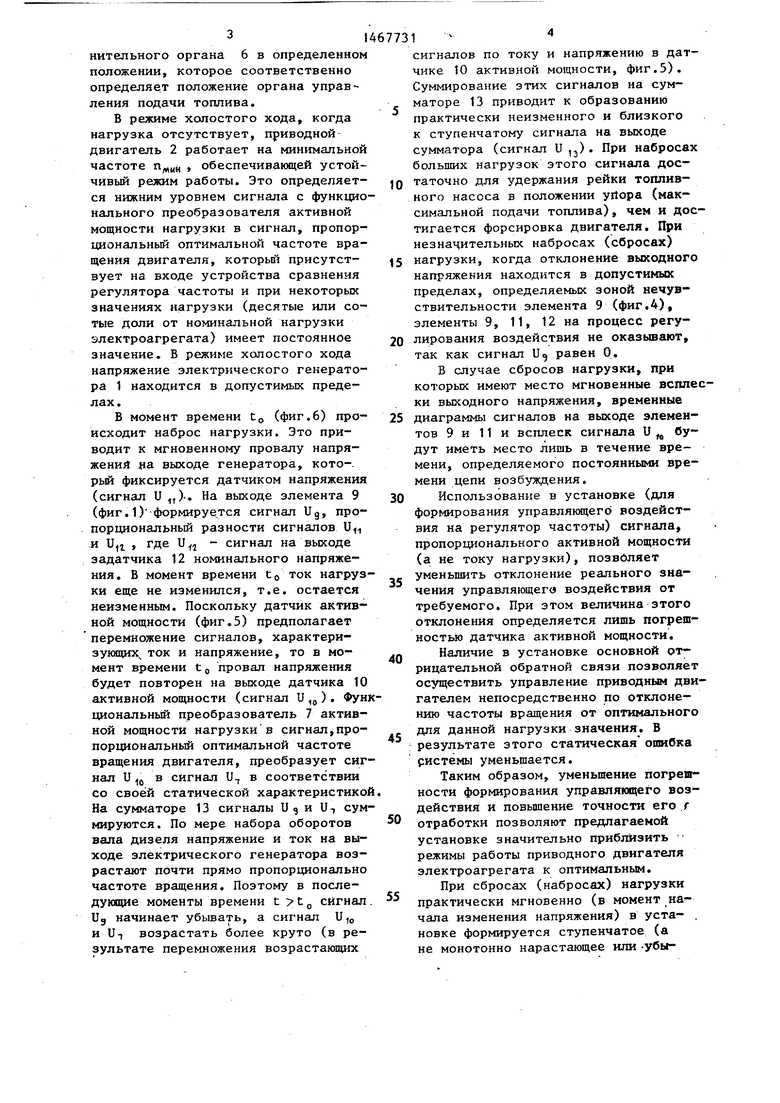
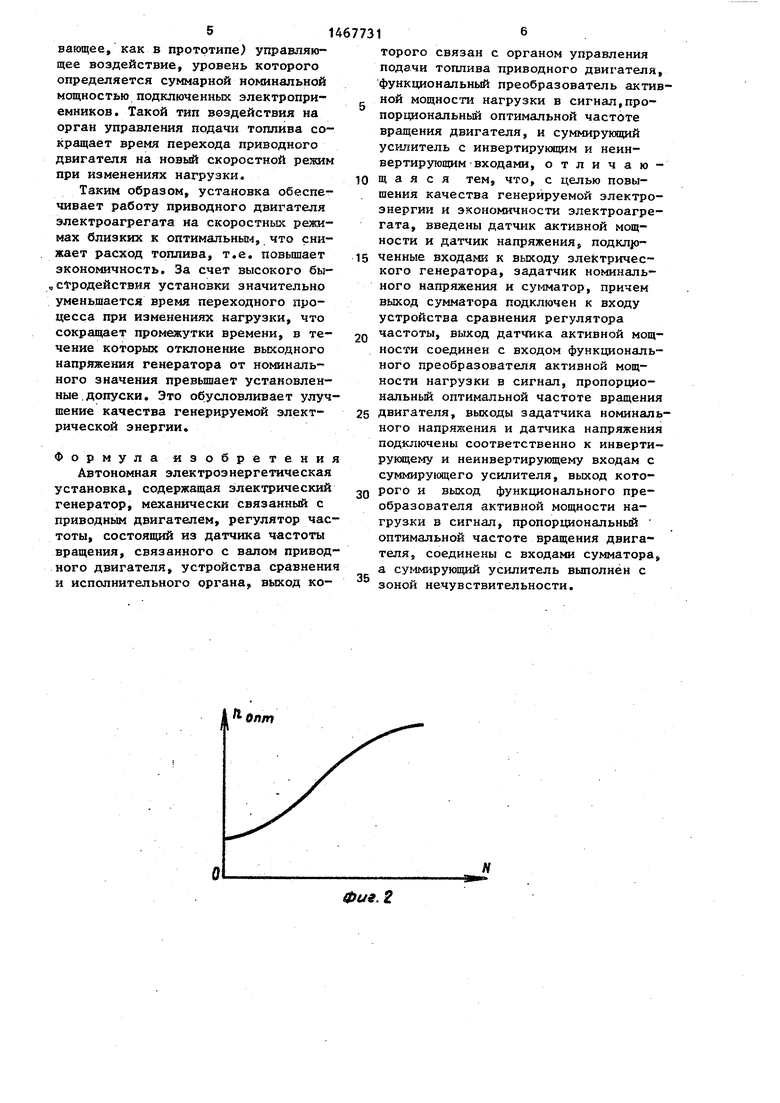
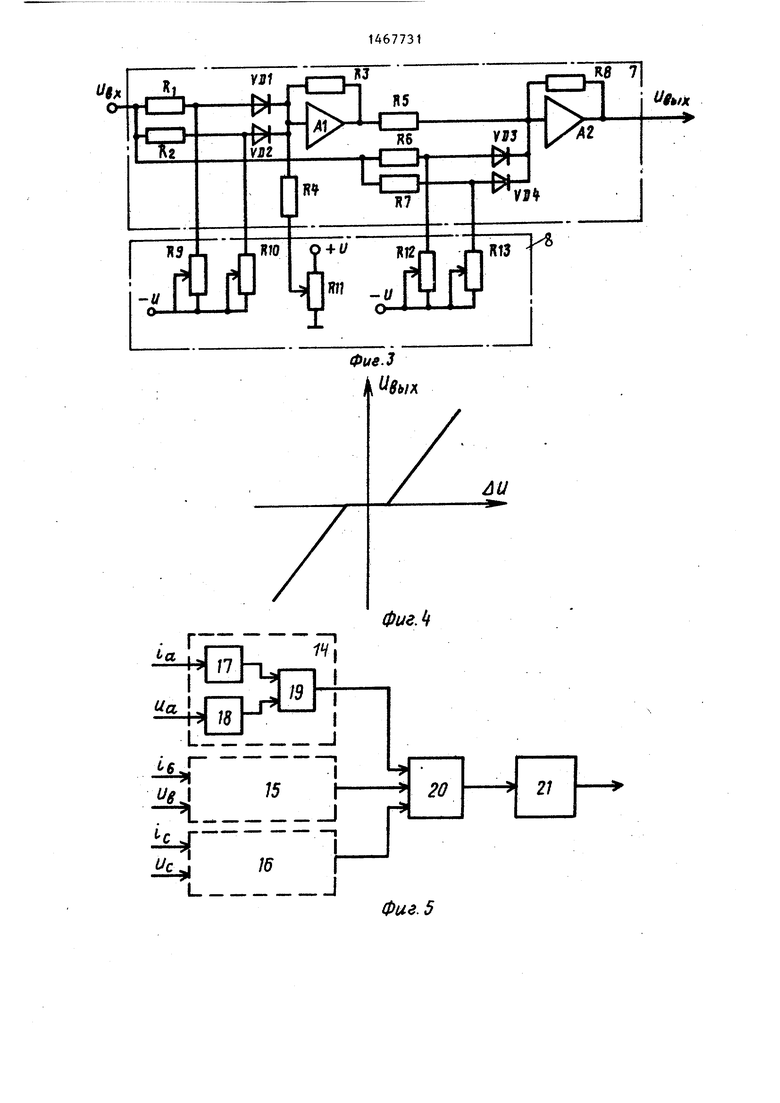
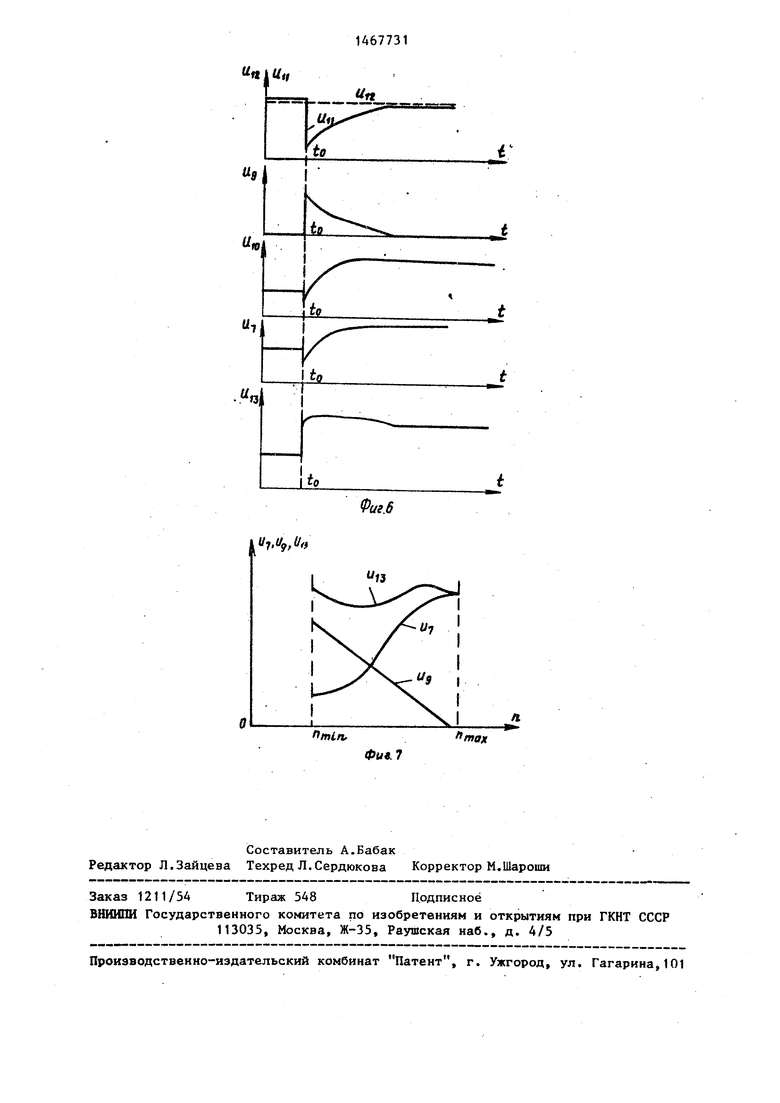
На фиг. 1 представлена функциональная схема установки} на фиг.2 - оптимальная скоростная характеристика дизельного приводного двигателя, на фиг.З - пример вьтолнения электрической схемы функционального преобразователя активной мощности нагрузки в сигнал, пропорщюнальный частоте вращения двигателя, и за- датчика функции оптимального регулирования) на фиг.4 - статическая характеристика суммируннцего усили- теля на фиг.5 - функциональная схема датчика активной мощностиj на фиг.6 - диаграммы сигналов на элементах устройства-,на фиг. 7 - графики зависимости выходных сигналов функционального преобразователя суммирующего усилителя и сумматора в функции от частоты вращения при 100% нагрузки.
Автономная электроэнергетическая установка содержит электрический генератор 1 (фиг.1), механически связанный с приводным двигателем 2, регулятор 3 частоты, состоящий из датчика 4 частоты вращения, связанного с валом приводного двигателя 2, устройства 5 сравнения и. исполни- тельного органа 6, выход которого связан с органом управления подачи топлива приводного двигателя 2,функ циональный преобразователь 7, соединенный с задатчиком 8 функции оптимального регулирования, и суммирующий усилитель 9 с инвертирующим и неинвертирующим входами. Установка содержит также датчик 10 активной ; мощности и датчик 11 напряжения, подключенные входами к выходу электрического генератора 1, задатчик 12 номинального напряжения и сумматор 13, причем выход сумматора подключен к входу устройства 5 сравнения регулятора 3 частоты, выход датчика 10
0
5
0
5
активной мощности соединен с входом функционального преобразователя 7, выходы задатчика 12 номинального напряжения и датчика 11 напряжения подключены соответственно к инвертирующему и неинвертирующему входам суммирующего усилителя 9, выход которого и выход функционального преобразователя 7 соединены с входами сумматора 13, а суммирующий усилитель вьшолнен с зоной нечувствительности. Датчик 10 активной мощности (фиг.5) состоит из трех идентичных блоков 14-16 измерения мгновенной полной мощности. В состав каждого из данных блоков входят датчик 17 тока фазы, датчик 18 фазного напряжения, аналоговьй блок 19 умножения. Выходы блоков 14-16 подключены к входам сумматора 20. На выходе сумматора 20 установлен фильтр 21.
Установка работает следуюпщм образом.
В установившемся режиме с выхода датчика 10 активной мощности на вход функционального преобразователя 7 поступает постоянньй сигнал, пропор- циональньш величине активной мощности нагрузки в сигнал, пропорциональный оптимальной частоте вращения двигателя 22 активной мощности на- . грузки. С выхода функционального преобразователя 7 снимается напряжение, величина которого соответствует требуемой для данной нагрузки (в соответствии с оптимальной функцией регулирования) частоте рраще- ния приводного двигателя 2. Выходное напряжение электрического генератора 1 находится в установленных допусти « к пределах. Поскольку в этом случае разность между выходными сигналами датчика 11 напряжения и задатчика 12 номинального напряжения лежит внутри зоны нечувствительности суммирующего усилителя 9, напряжение на выходе последнего отсутствует. Напряжение на выходе сумматора 13, поступающее на 0 первьй вход устройства 5 сравнения регулятора 3 частоты, определяется только выходным сигналом функционального преобразователя 7. На второй вход устройства 5 сравнения поступает сигнал, снимаемый с датчика 4 частоты. Разностный сигнал, присутствуклций на выходе устройства 5 сравнения, удерживает шток испоп0
5
0
5
5
31
нительного органа 6 в определенном положении, которое соответственно определяе:т положение органа управ-- ления подачи топлива.
В режиме холостого хода, когда нагрузка отсутствует, приводной двигатель 2 работает на минимальной частоте , обеспечиванмцей устойчивый режим работы. Это определяет- ся нижним уровнем сигнала с функционального преобразователя активной мощности нагрузки в сигнал, пропор- циональньй оптимальной частоте вращения двигателя, которьй присутст- вует на входе устройства сравнения регулятора частоты и при некоторых значениях нагрузки (десятые или сотые доли от номинальной нагрузки электроагрегата) имеет постоянное значение. В режиме холостого хода напряжение электрического генератора 1 находится в допустимых преде-- лах.
В момент времени t (фиг.6) про- исходит наброс нагрузки. Это приводит к мгновенному провалу напряжений на выходе генератора, кото-- рый фиксируется датчиком напряжения (сигнал и ,,)-. На выходе элемента 9 (фиг. 1) формируе,тся сигнал IIд, пропорциональный разности сигналов U,i и , где и - сигнал на выходе задатчика 12 номинального напряжения. В момент времени to ток нагрузки еще не изменился, т.е. остается неизменным. Поскольку датчик актив- ной мощности (фиг.5) предполагает перемножение сигналов, характери- зуиицих ток и напряжение, то в мо- мент времени t о провал напряжения будет повторен на вькоде датчика 10 активной мощности (сигнал U ,). Фунциональный преобразователь 7 активной мощности нагрузки в сигнал,пропорциональный оптимальной частоте вращения двигателя, преобразует сигнал и 0 в сигнал U-, в соответствии со своей статической характеристико На сумматоре 13 сигналы U и UT суммируются. По мере набора оборотов вала дизеля напряжение и ток на выходе электрического генератора возрастают почти прямо пропорционально частоте вращения. Поэтому в последующие моменты времени t t сигнал Ug начинает убывать, а сигнал U,o и UT возрастать более круто (в результате перемножения возрастающих
Q 5 0
5 О
5
1 -
сигналов по току и напряжению в датчике 10 активной мощности, фиг.5). Суммирование этих сигналов на сумматоре 13 приводит к образованию практически неизменного и близкого к ступенчатому сигнала на выходе сумматора (сигнал U ,j). При набросах больших нагрузок этого сигнала достаточно для удержания рейки топливного насоса в положении yrtopa (максимальной подачи топлива), чем и достигается форсировка двигателя. При незначительных набросах (сбросах) нагрузки, когда отклонение выходного напряжения находится в допустимых пределах, определяемых зоной нечувствительности элемента 9 (фиг.4), элементы 9, 11, 12 на процесс регулирования воздействия не оказывают, так как сигнал Ug равен 0.
В случае сбросов нагрузки, при которых имеют место мгновенные всплески выходного напряжения, временные диаграммы сигналов на выходе элементов 9 и 11 и всплеск сигнала U будут иметь место лишь в течение времени, определяемого постоянными времени цепи возбуждения.
Использование в установке (для формирования управлякицего воздействия на регулятор частоты) сигнала, пропорционального активной мощности (а не току нагрузки), позвбляет уменьшить отклонение реального значения управлякяцега воздействия от требуемого. При этом величина этого отклонения определяется лишь погрешностью датчика активной мощности.
Наличие в установке основной отрицательной обратной связи позволяет осуществить управление приводньм двигателем непосредственно по отклонению частоты вращения от оптимального для данной нагрузки значения. В результате этого статическая ошибка ристемь уменьшается.
Таким образом, уменьшение погрешности формирования управляющего воздействия и повьшение точности его г отработки позволяют предлагаемой установке значительно приблизить режимы работы приводного двигателя электроагрегата к оптимальным.
При сбросах (набросах) нагрузки практически мгновенно (в момент начала изменения напряжения) в уста- . новке формируется ступенчатое (а не монотонно нарастающее ипи -убывакицее, как в прототипе) управляющее воздействие, уровень которого определяется суммарной номинальной мощностью подключенных электроприемников. Такой тип воздействия на орган управления подачи топлива сокращает время перехода приводного двигателя на новый скоростной режим при изменениях нагрузки.
Таким образом, установка обеспечивает работу приводного двигателя электроагрегата на скоростных режимах близких к оптимальным, что снижает расход топлива, т.е. повьшает экономичность. За счет высокого бы- ,сТродействия установки значительно уменьшается время переходного процесса при изменениях нагрузки, что сокращает промежутки времени, в течение которых отклонение выходного напряжения генератора от номинального значения превышает установленные, допуски. Это обусловливает улучшение качества генерируемой электрической энергии.
Формулаязобре тения
Автономная электроэнергетическая установка, содержащая электрический генератор, механически связанный с приводным двигателем, регулятор частоты, состоящий из датчика частоть вращения, связанного с валом приводного двигателя, устройства сравнения и исполнительного органа, выход коФиг. 2
0
5
0
5
0
5
торого связан с органом управления подачи топлива приводного двигателя, функциональный преобразователь активной мощности нагрузки в сигнал,пропорциональный оптимальной частоте вращения двигателя, и суммиругаций усилитель с инвертирукщим и неинвертирующим входами, отличающаяся тем, что, с целью повышения качества генерируемой электроэнергии и экономичности электроагрегата, введены датчик активной мощности и датчик напряжения, подкл о- ченные входами к выходу элekтpичec- кого генератор а, задатчик номинального напряжения и суг-жатор, причем выход сумматора подключен к входу устройства сравнения регулятора частоты, выход датчика активной мощности соединен с входом функционального преобразователя активной мощности нагрузки в сигнал, пропорцио- нальньй оптимальной частоте вращения двигателя, выходы задатчика номинального напряжения и датчика напряжения подключены соответственно к инверти- рукядему и неинвертирующему входам с суммирующего усилителя, выход которого и выход функционального преобразователя активной мощности нагрузки в сигнал, пропорциональный оптимальной частоте вращения двигателя, соединены с входами сумматора, а су14мирующий усилитель выполнен с зоной нечувствительности.
Фиг.
Фие.5
«
Ut,
и
ю
Ui
/
Й
tf7.tfy,/
nmifi
max
| , Авторское свидетельство СССР № 466600, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор частоты электроэнергетической установки | 1980 |
|
SU877771A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
